
抓袋机械手的结构设计及运动仿真设计(含CAD图,SolidWorks三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
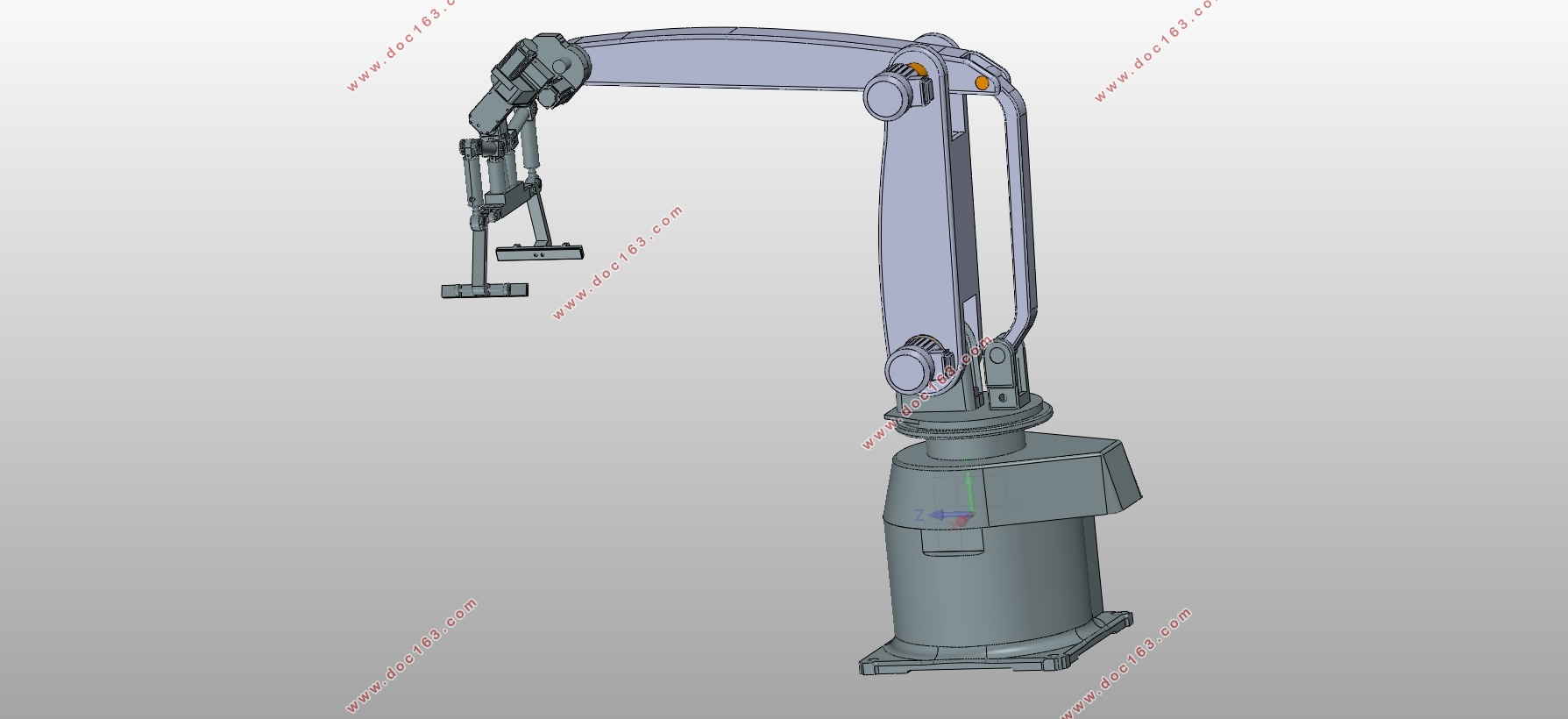
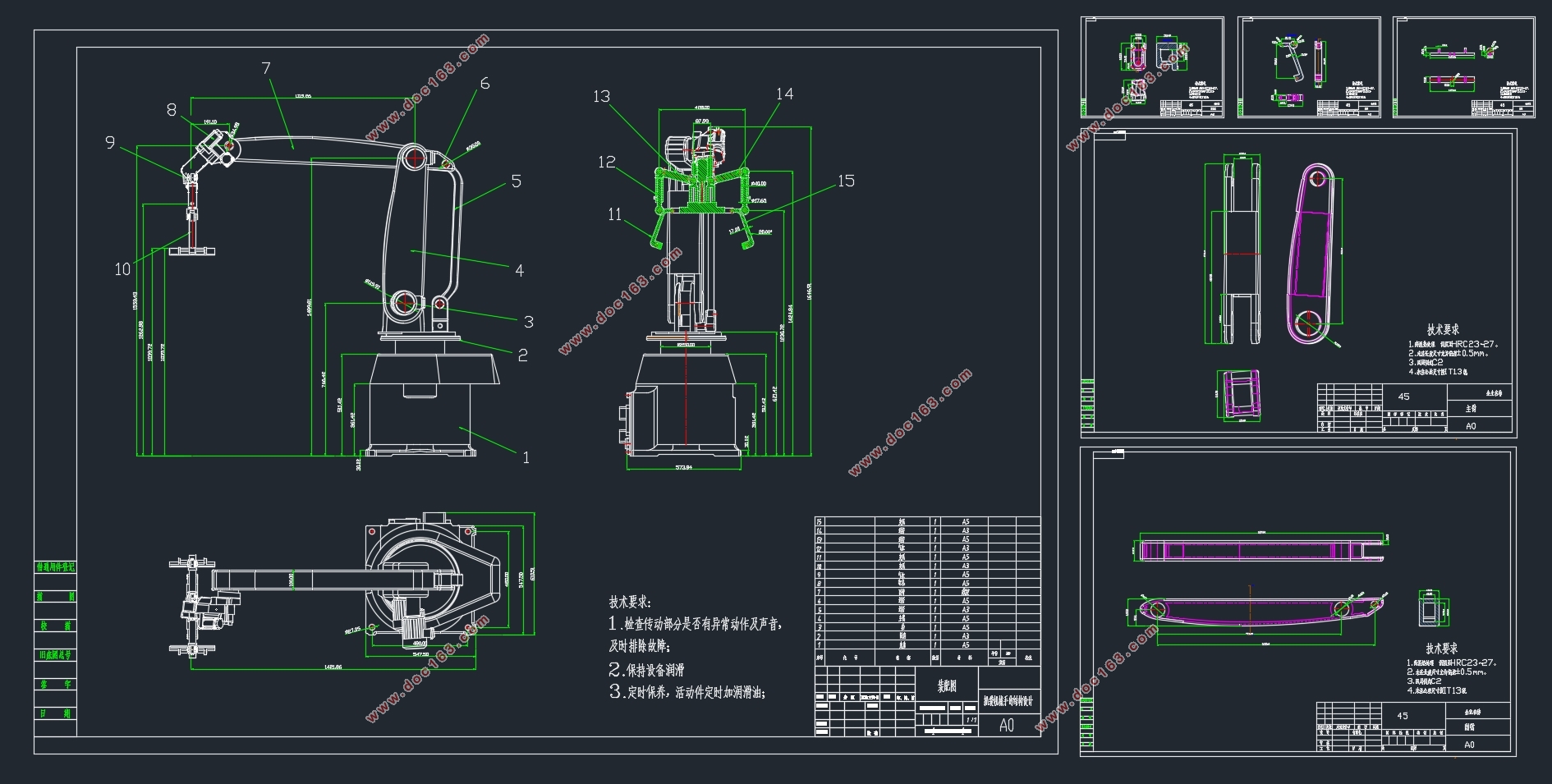
抓袋机械手的结构设计及运动仿真设计(含CAD图,SolidWorks三维图)(论文说明书10000字,CAD图纸6张,SolidWorks三维图)
本文就抓袋机械手的未来发展趋势和目前状况作出了相应的概括。根据相应的指标、参数,在满足标准化型材的前提下对抓袋机械手的整体进行结构设计。关于一些重要的零部件做了详细分析和原理作用。因为,抓袋机械手在工作的过程中会受一些应力的影响进而可能会发生变形,以确保抓袋机械手能手臂出精度比较高的产品。而且它要求的是在最小的尺寸空间里能够实现三个运动方向运动范围的最大化。本文设计中主要使用了CAD、 等工程制图软件,用三维建模,CAD画出二维抓袋机械手图。
1.2本课题的内容和要求
1. 驱动部分:它是前两部分的动力,因此也称动力源,常用的有液压、齿轮、电力和电机四种驱动形式。
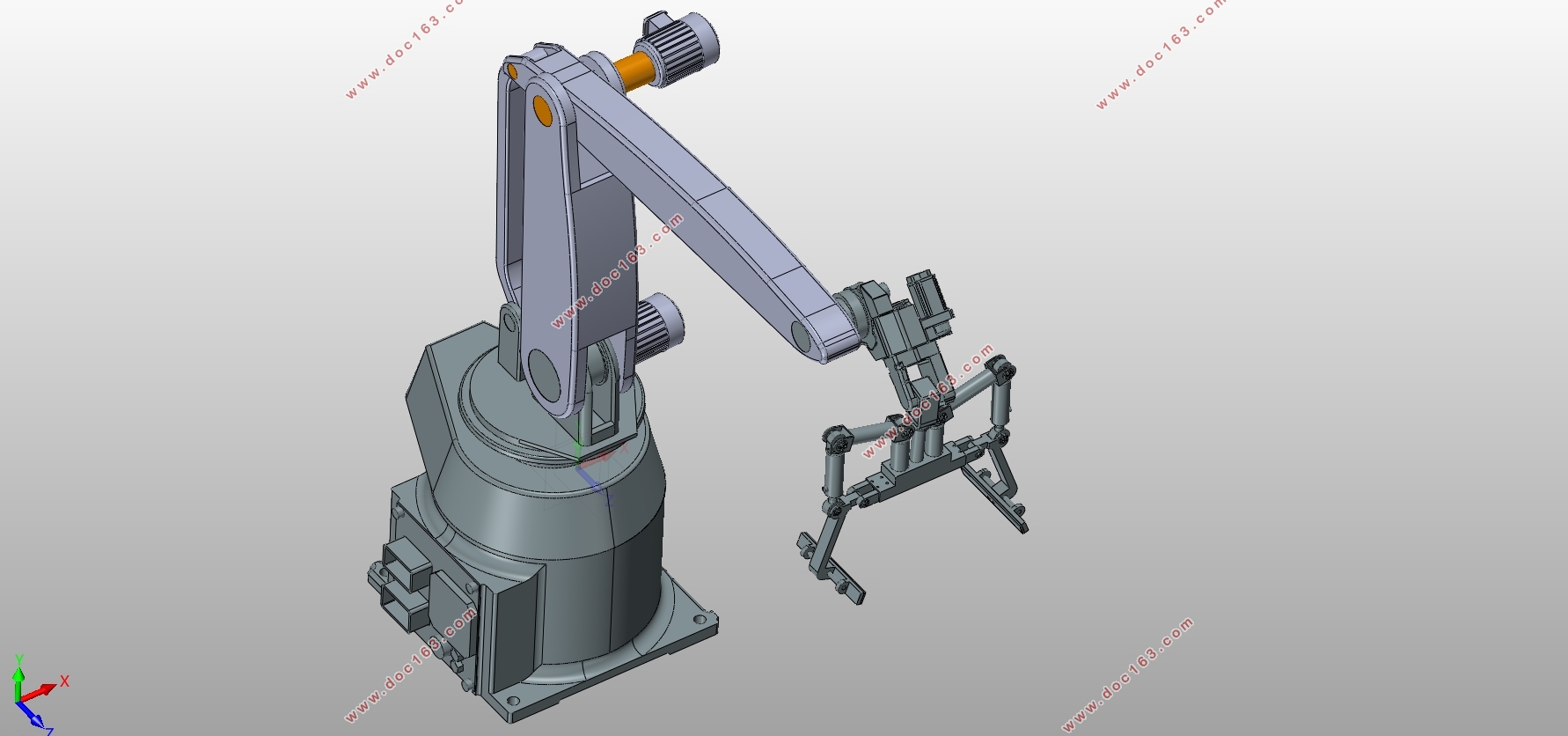
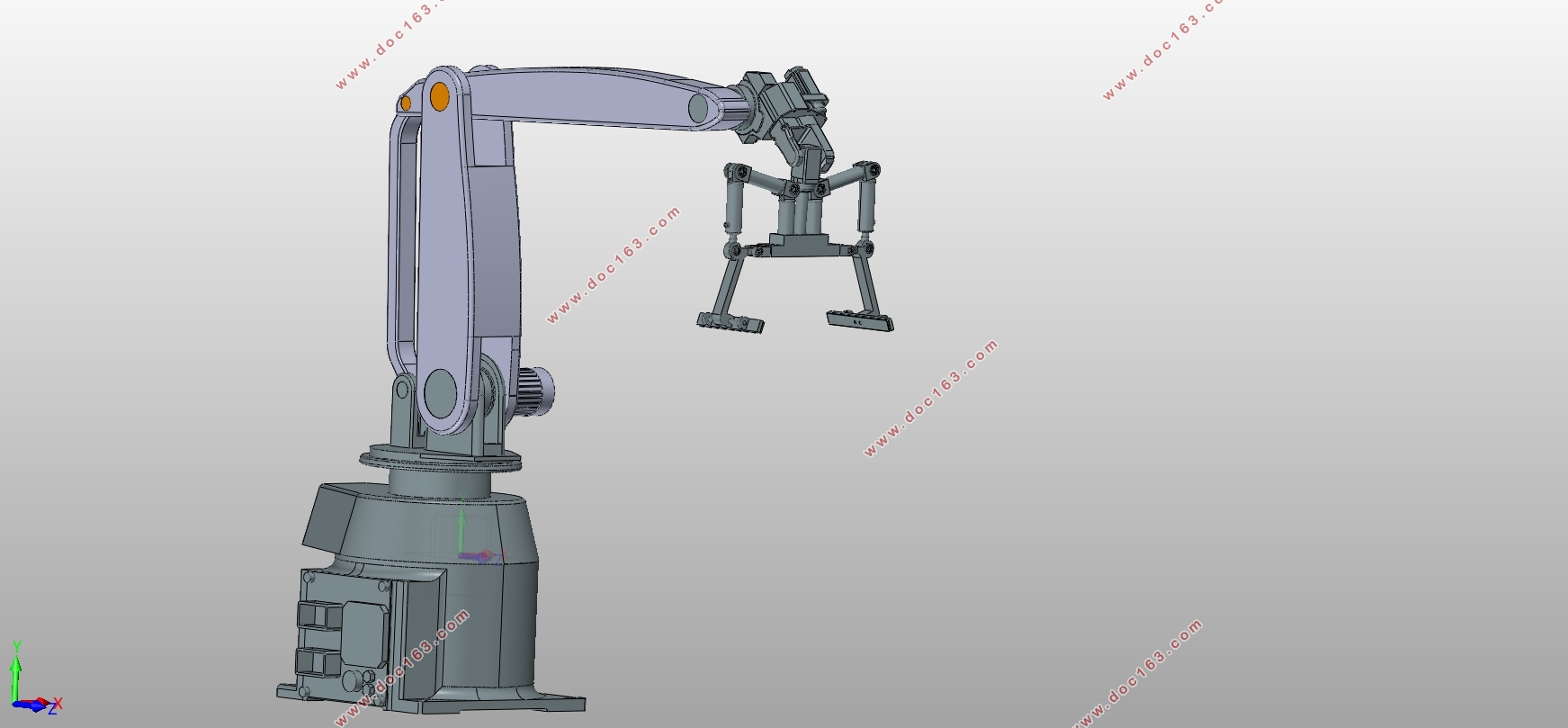
本次设计采用电机驱动形式,底盘滚轮转动采用一组电机,手臂位置采用独立电机控制,手臂位置为端盘形式。
2. 控制部分:它是机器人动作的指挥系统,由它来控制动作的顺序(程序)、位置和时间(甚至速度与加速度)等。
由PLC控制系统遥控或自动感应识别进行操作,机器人胸部位置有液晶触摸屏,满足检测人员需求,在机身位置设计了手臂机构,可以夹持检测工具箱等检测设备进行巡回检测,这样可以节省检测人员回工具放置区取工具的时间,并且可以使检测人员随时随地取用工具,节约了大量的时间,提高了生产成本。 [来源:http://www.think58.com]
3. 其它部分:如机体、机构、行程检测装置和传感装置等。
手臂采用电机通过齿轮传动达到上下运动的效果。
本课题是设计抓袋机械手—机体结构,驱动机构、结构的功能。
主要设计难点是重心前后移动与身体左右平衡难以协调的问题,尤其是在滚轮行驶过程中身体不倾斜的前提下更难以实现。
在机器人行驶到终点位置时可以自动进行减速并稳定站立,是本次设计的主要难点与解决的问题。
[来源:http://think58.com]
目 录
摘要 1
1机器人研究的目的和意义 2
2 机器人国内外发展现状 3
3 机器人的分类 4
第一章 抓袋机械手设计 5
1.1毕业设计目的 5
1.2本课题的内容和要求 5
第二章 手臂机构设计 7
2.1手部设计 7
2.2传动设计 8
2.3臂回位夹取机构设计 8
2.4 底盘旋转装置 9
2.5 底盘的设计 9
2.6、底盘中央断面设计 10
第三章 控制系统设计 11
3.1 机器人控制系统分类 11
3.2 控制系统方案分析 11
3.3 控制系统特点 11
3.4 机器人的控制系统方案确定 12
第四章 机座的结构设计 13
4.1电机的选择 14
4.2减速器的选择 15
[资料来源:http://www.THINK58.com]
4.3螺柱的设计与校核 15
第五章 抓袋机械手固定方式 17
5.1常用的定位方式 17
5.2 影响因素 17
5.3抓袋机械手运动的缓冲装置 18
第六章 抓袋机械手的组成与分类 20
7.1抓袋机械手组成 20
7.2抓袋机械手分类 20
总结 22
参考资料 23