
自移动平台总体设计(含CAD零件图装配图,CATIA三维图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
自移动平台总体设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书14000字,CAD图9张,CATIA三维图)
摘要
自移动平台可以叫做自主移动机器人平台,如今已经涉及到相当广泛的领域了,就拿呈井喷式发展的物流行业来说,能在仓库间自动巡航的智能平台应用极为广泛,既提高了整个仓储运输系统的效率,更极大地降低了因为人员冗余造成的高昂成本。
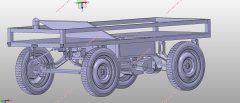
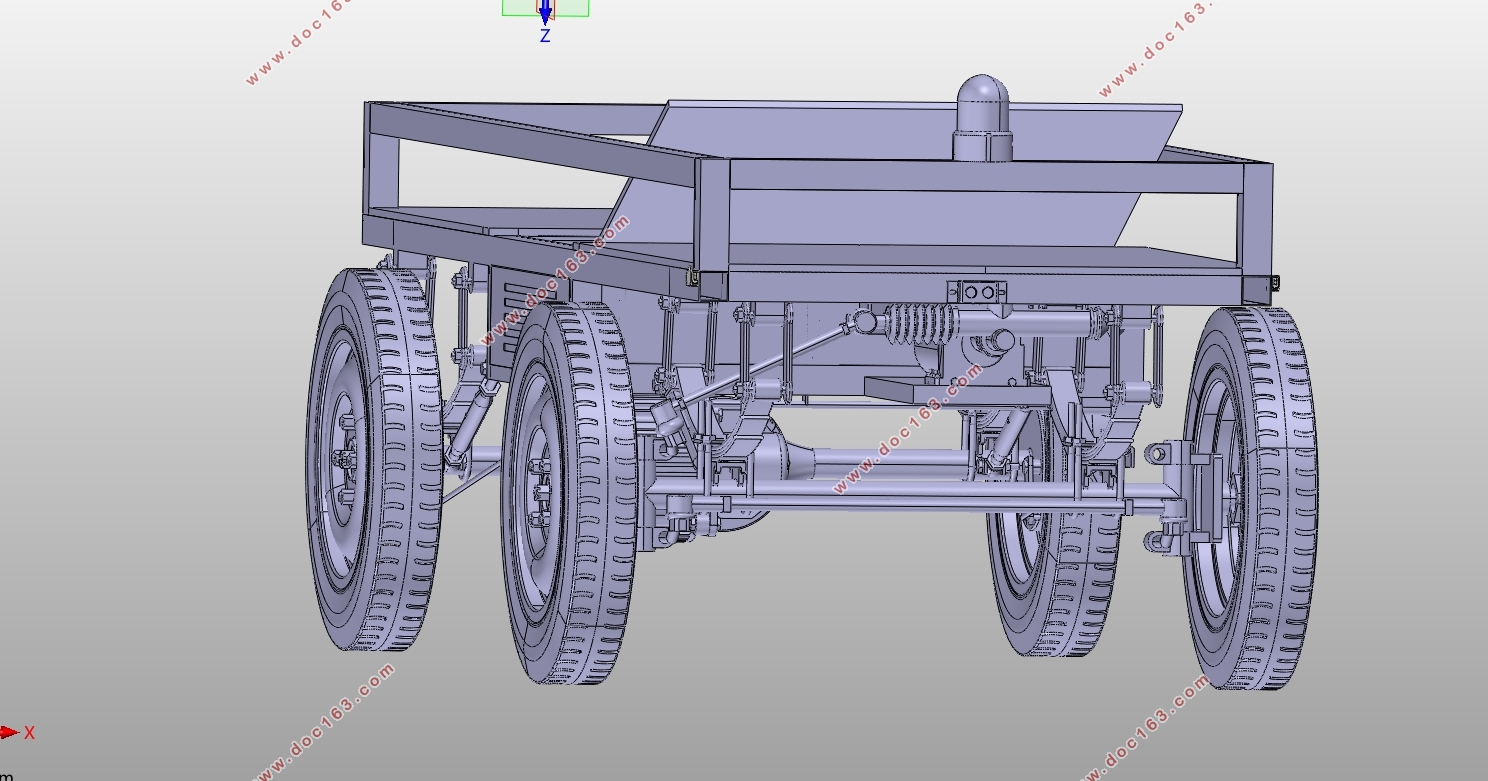
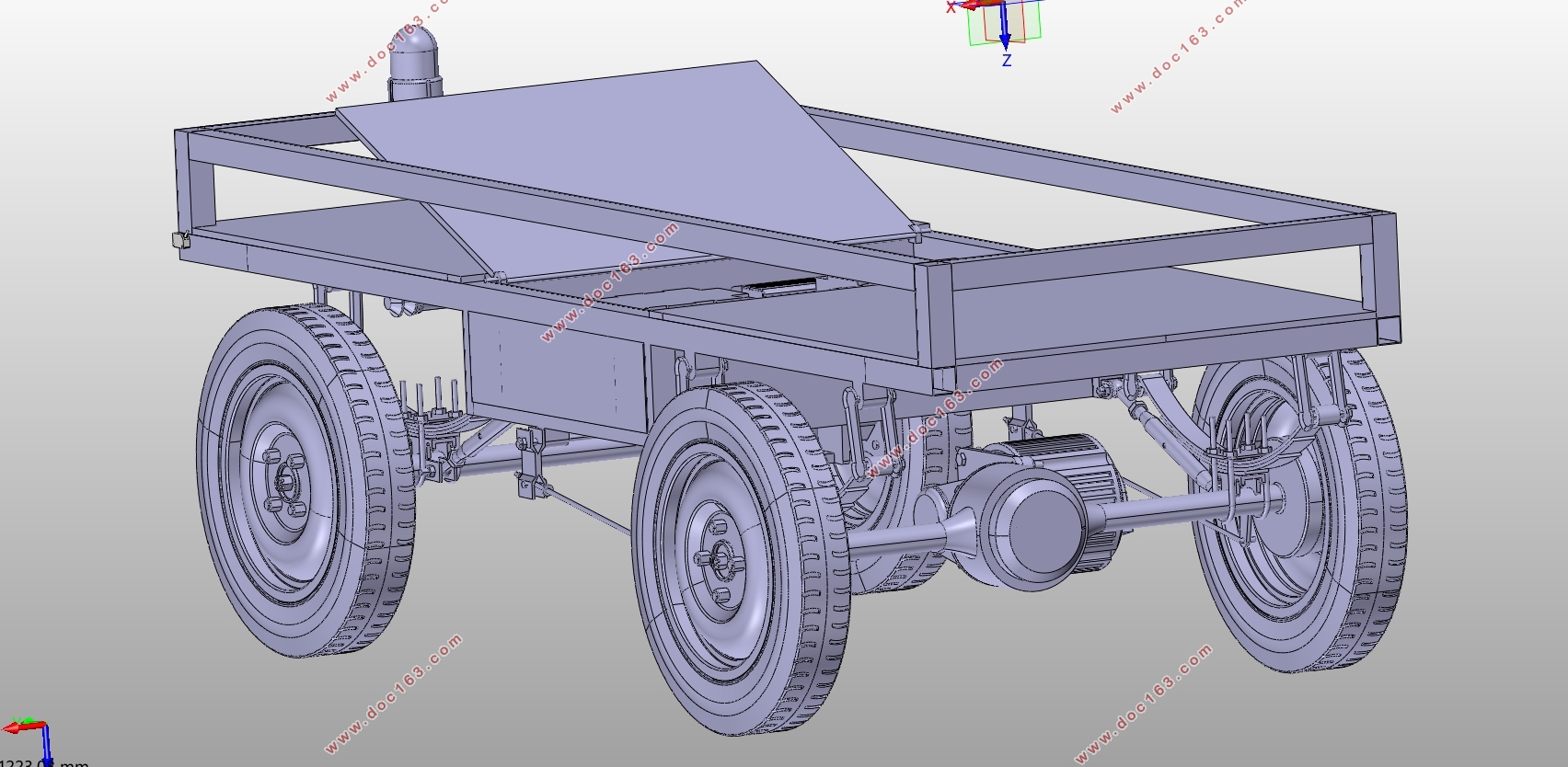
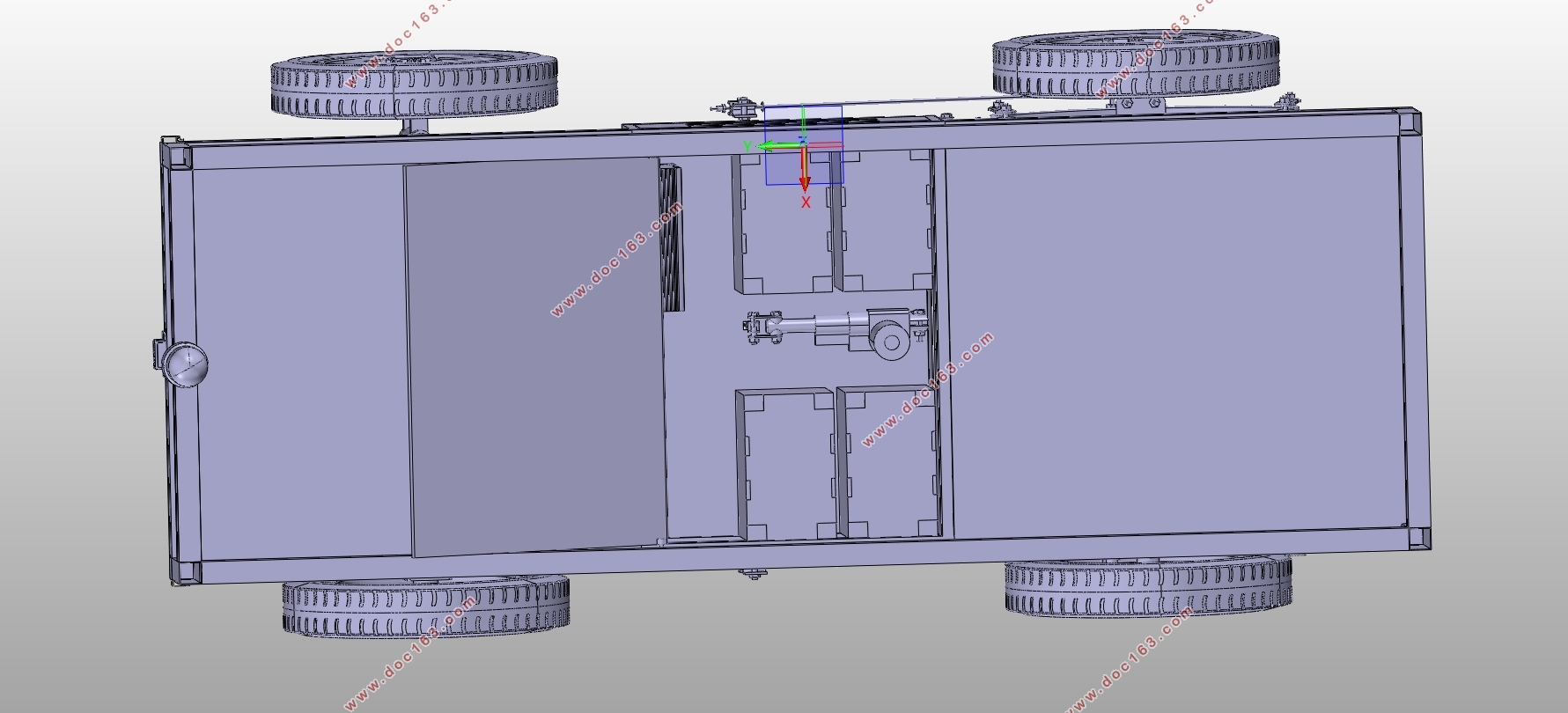
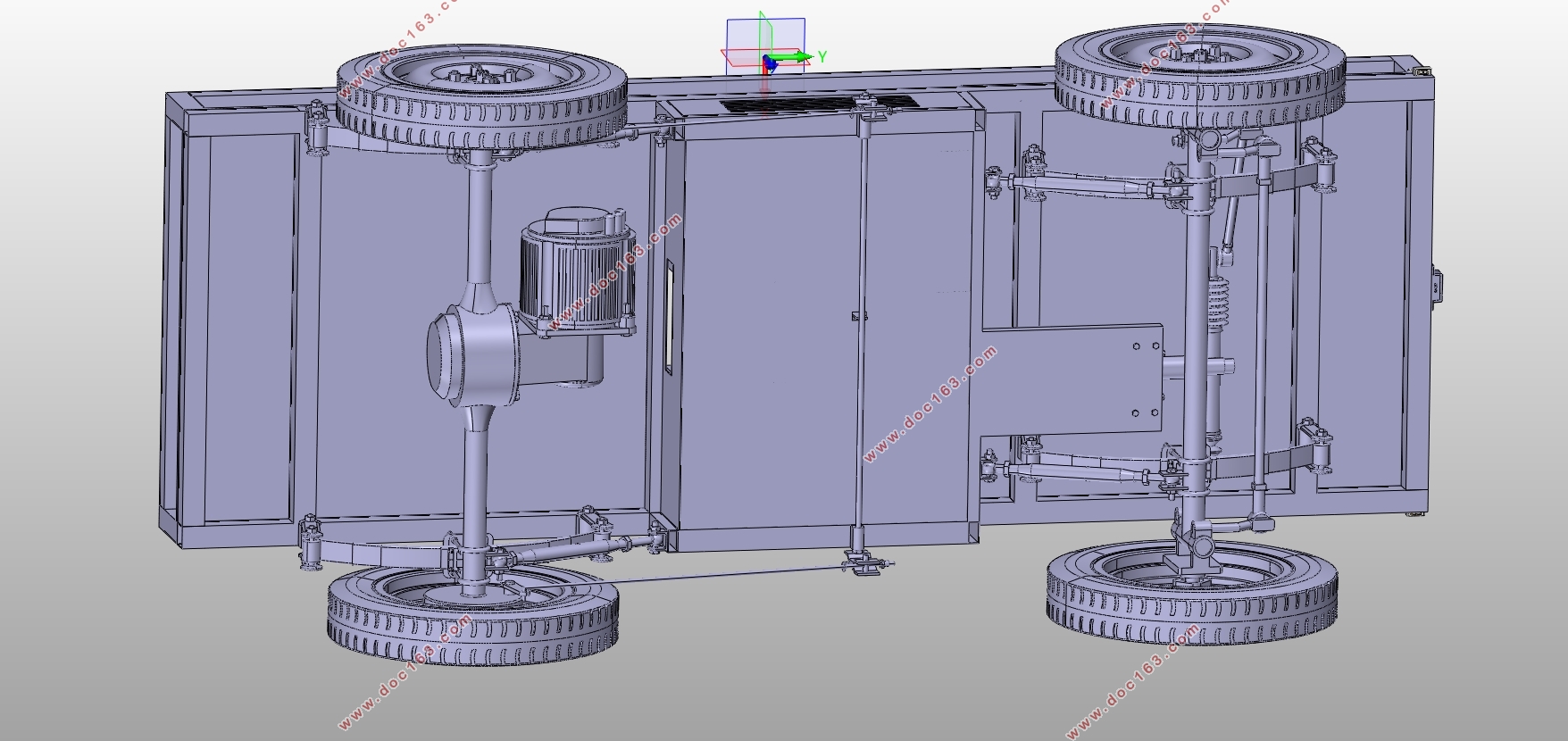
本文首先调查了国内外各种移动机器人的研究现状,然后结合设计要求确定了总体的结构及各项目标参数,完成了自移动平台的整车结构设计及零部件的选型,然后用CATIA将整车建模出来,并且在文中说明了自移动平台适用的结构化环境,以及确定了实现自主移动的方法。
关键词:自移动平台;整车结构;CATIA;建模;自主移动
Abstract
The self-mobile platform can be called an autonomous mobile robot platform. Nowadays, it has been applied to a wide range of fields. For the logistics industry that develops into a well blowout, the intelligent platform that can automatically cruise between warehouses is extremely widely used, improving the entire warehouse. The efficiency of the transportation system greatly reduces the high costs due to personnel redundancy.
This article first investigated the research status of various mobile robots at home and abroad, then determined the overall structure and various target parameters based on the design requirements, completed the entire vehicle structural design and component selection of the self-mobile platform, and then the vehicle It is modeled out by CATIA, and in the article, the structured environment applicable to the mobile platform is described, and the method for achieving autonomous mobility is determined.
Key Word: Self-mobile platform; Vehicle structure; Modeling; Autonomous movement
3.自移动平台主要参数的选择
自移动平台是使用电力作为动力源,能自主进行前进、后退、转向和停车的运载车辆,其驱动系统主要由电机、蓄电池、主减速器和驱动轮等组成。要实现移动平台功能和性能的总体结构参数和性能参数的选取和确定,主要内容包括:自移动平台的尺寸参数、质量参数、性能参数的设计,自移动平台(车架和底盘)的总布置。
3.1自移动平台主要尺寸的确定
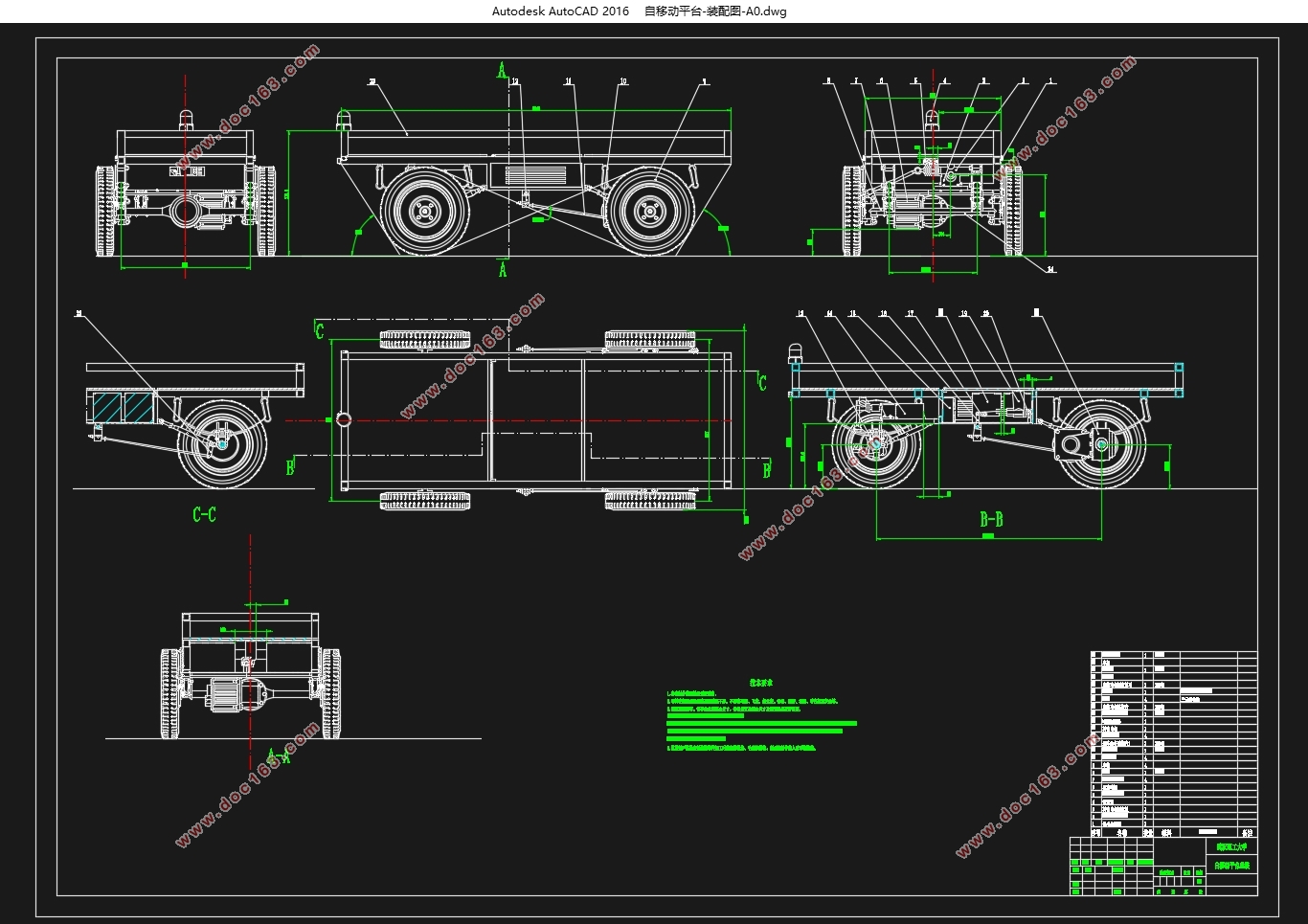
(1)根据设计目标要求,该移动平台整体外廓尺寸为2100×800×600;该移动平台的总长为 =2100mm,宽度 =( /3)+(195±60)mm=835~955mm,取车宽800mm,较为合适。 [资料来源:http://think58.com]
(2)轴距L与总长 的关系为: = ,式中C为比例系数,其值在0.52~0.66之间,由于本次设计自移动平台为电机后置后轮驱动,所以C值为0.52~0.56,这里取C=0.55,则轴距 =0.55 =1155mm,取L=1150mm。
(3)与传统电动车一样,自移动平台增大前轮距有助于增加侧倾角。在选定前轮距范围内,要求能布置车架、前悬和前轮等总成部件,并且保证一定的转向空间。在确定后轮距时必须考虑两纵梁之间的宽度、动力总成布置、后悬架和车轮大小等因素。初步选定前后轮距范围为900~1100mm。
3.2自移动平台质量参数的确定
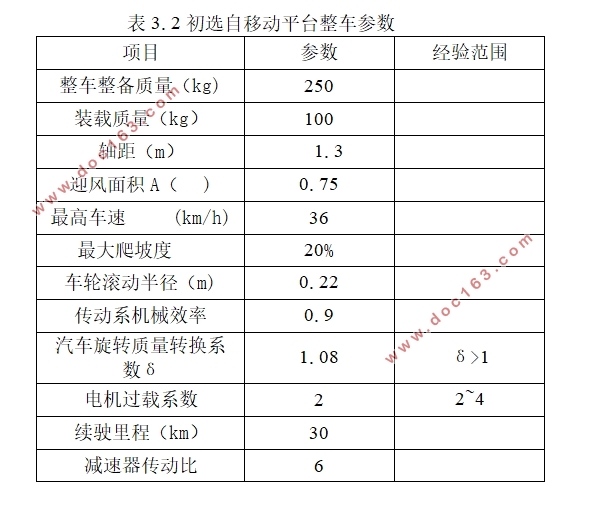
(1)自移动平台的整备质量 是指该平台带有全部装备,没有装货时的整车质量,初步定为250kg。
(2)自移动平台的装载质量 指的是在硬质良好路面上允许的额定装载质量,选定为100kg。所以总质量m为350kg。
(3)轴荷分配是指在空载或者满载静止状态下,前后车轴所受载荷占整车对支撑平面的垂直载荷的百分比。依据下表3.1[1],可知后置后驱的乘用车满载情况下前轴载荷占40%~46%,空载时占38%~50%。
表3.1 各类汽车的轴荷分配(%)
车型 满载 空载
前轴 后轴 前轴 后轴 [版权所有:http://think58.com]
轿车 发动机前置前轮驱动 47~60 40~53 56~66 34~44
发动机前置后轮驱动 45~50 50~55 51~56 44~49
发动机后置后轮驱动 40~46 54~60 38~50 50~62
货车 4×2后轮单胎 32~40 60~68 50~59 41~50
4×2后轮双胎,长短头式 25~27 73~75 44~49 51~56
4×2后轮双胎,平头式 30~35 65~70 48~54 46~52
6×4后轮双胎 19~25 75~81 31~37 63~69
[资料来源:www.THINK58.com]

 [资料来源:THINK58.com]
[资料来源:THINK58.com] 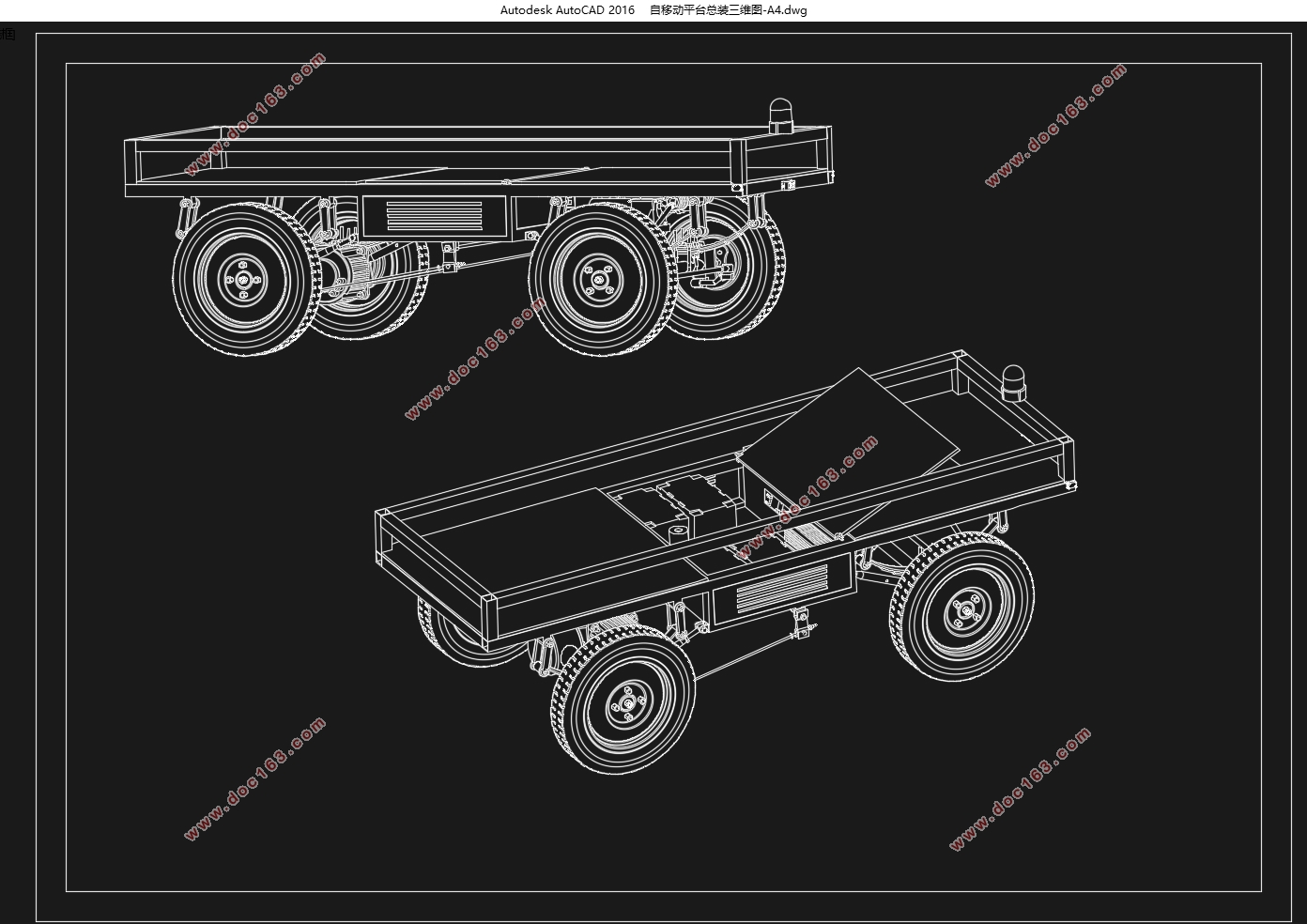
目录
1.绪论 - 1 - [版权所有:http://think58.com]
1.1课题背景及研究意义 - 1 -
1.2自移动平台国内外研究现状 - 2 -
1.3本文主要研究内容 - 3 -
2.结构化环境及自移动平台结构形式的选择 - 3 -
2.1结构化环境的选择 - 3 -
2.2轴数及驱动形式 - 4 -
2.3底盘布置形式 - 4 -
3.自移动平台主要参数的选择 - 6 -
3.1自移动平台主要尺寸的确定 - 6 -
3.2自移动平台质量参数的确定 - 6 -
3.3自移动平台性能参数的确定 - 7 -
3.3.1动力学分析 - 7 -
3.3.2动力性能需求 - 8 -
3.4本章小结 - 9 -
4.驱动系统设计 - 9 -
4.1驱动电机的选择 - 9 -
4.1.1电机的特性分析 - 9 -
4.1.2功率的匹配 - 10 -
4.1.3转矩和转速的计算 - 11 -
4.2蓄电池参数设计 - 12 - [来源:http://think58.com]
5.传动系统设计 - 13 -
5.1主减速器设计 - 13 -
5.2差速器设计 - 15 -
5.3驱动车轮的传动装置与桥壳 - 17 -
6.转向系统与制动系统设计 - 18 -
6.1制动系统 - 18 -
6.2转向系统 - 20 -
7.行驶系统设计 - 21 -
7.1悬架布置 - 21 -
7.2车架设计与整车装配 - 22 -
8.自移动平台的自主移动方案的设计 - 23 -
8.1功能设计 - 23 -
8.2自主移动总流程 - 24 -
9.结论与展望 - 25 -
9.1结论 - 25 -
9.2展望 - 26 -
致谢 - 26 -
参考文献 - 26 -