
三自由度机器人手腕设计及控制(含CAD零件图装配图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
三自由度机器人手腕设计及控制(含CAD零件图装配图)(论文说明书12000字,CAD图8张)
摘要
机器人技术融合了许多学科的知识。比如控制工程理论、理论力学、传感技术、人工智能、零件设计等多学科而形成的复杂的高端技术,是当前这个时代工业研究发展领域中万众瞩目的前沿课题,机器人在众多行业里都得到或多或少、或浅或深不同程度的应用。如今机器人技术的使用情况,是一个国家地区工业自动化水平的重要标志之一,所以受到各个处在领先地位工业国家的重视,投入大量人员、财力用来研究新兴技术并推广发展应用在各个惠及民生的领域里。
这个课题需要完成三自由度腕部的结构部分设计。以及手腕控制系统的设计选型。在已有的参考技术资料的基础上,通过总体设计、基本分析,选择腕部的传动方式及控制系统的选择,然后对腕部的结构就行整体设计和力学分析,确定手腕部分的输出功率,然后计算出能够驱动腕部所需的动力,在此基础之上,选择合适型号的电机。在选择好传动方式和完成机械部件的设计基础上,对手腕部分的控制系统进行总体设计,确定腕部结构能够配合其他结构在控制之下进行指定动作。并用CAD/solidworks软件完成从建模到运动学分析的全过程。需要学习机械原理、零件设计、控制工程理论以及CAD制图等相关的知识,并确所设计产品安全可靠、性能优良、经济实用。
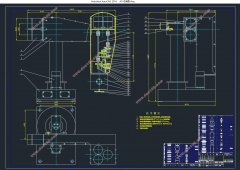
这次设计将在已有理论基础上,针对以往设计出的产品的不足,根据实际情况和使用要求,确定采用三自由度的机器人手腕结构设计方案;因为手腕部分结构复杂,构件多而杂,设计计算颇有难度。需要使用三维制图软件solidworks进行三维建模。毕设完成腕部的结构设计选型,并且使用2D绘图软件画出装配图和部分重要的零件图,并对其中一些零件的强度进行校核,使机器人手腕部分的整体结构在控制系统的控制下能够完成指定工作的要求。
关键词:工业机器人 腕部 控制
Design and control of wrist for three DOF robot
Abstract
Robot technology is the combination of comprehensive knowledge of many disciplines, such as computer science and technology, control theory, mechanical engineering principle, sensor technology, artificial intelligence, parts design and other disciplines to form the complex of high-end technology, is a frontier topic in this era the industrial research and development in the field of attention at present, in many industries in the robot get more or less, or shallow or deep application in different degree. Now the use of robot technology, is an important sign of industrial automation level of a country, so by all in the leading position in industrial countries attach importance to, put a lot of financial personnel, to promote the development of new technology research and application in various fields of Hui Jimin. [资料来源:http://think58.com]
The task of this design and the problem to be solved is to design the structural design and control system of the wrist part of a three degree of freedom robot. On the basis of technical information on the present, through the overall design, basic analysis, selection of drive and control system of the wrist, and structure of the wrist for the overall design and mechanical analysis, determine the output power of the wrist part, and then calculate the driving power to the wrist required, on this basis, choose the suitable type of motor. In determining the transmission mechanism and complete the design of mechanical parts based on the control system of the wrist part of the overall design, determine the structure of the wrist designed to be able to cooperate with other robot for the specified action under control. CAD/solidworks software is used to complete the whole process from modeling to kinematics analysis. It is necessary to study mechanical principle, part design, control engineering theory, CAD drawing and other related knowledge, and make sure that the designed product is safe, reliable, good performance, economical and practical.
This design will be based on the existing theories, for the previous lack of product design, according to the requirements of the actual situation and use, determine the design scheme of the robot wrist structure with three degrees of freedom; because the wrist part of complex structure, component and miscellaneous, quite difficult design. The 3D modeling software is needed to model and assemble the work. This time, the design of the robot wrist structure; and the use of CAD drawing software to draw the wrist assembly and parts drawing, and some parts of the strength check, the overall structure of the robot wrist part is able to complete the assigned work under the control of the control system requirements.
Keywords: robot wrist control
腕部结构选型
手腕是机器人的机械臂和执行器(夹具)之间的连接部件。它的功能是使自身的自由度确定被夹具控制的物体的状态。同时也可以说是确定夹具的状态。因此手腕同时被叫做机器人的状态机构。对于大部分工业机器人来说,末杆都有与其他部件互不影响的自转功能,如果那个杆还能在空间取任意坐标,这样的话和他相连接的夹具能在空间去完成所有状态,这样就是做到完全灵活的动作要求。对于任意其他杆件的状态,能有两个方向坐标确定。 [资料来源:THINK58.com]


目录
1绪论 1
1.1课题背景 1
1.1.1我国发展现状 1
1.1.1国外发展现状 2
1.2机器人手腕组成部分 2
1.2.1驱动装置 2
1.2.2控制系统 2 [来源:http://www.think58.com]
1.2.3机械结构 2
1.3本课题任务 3
2腕部结构选形 4
2.1单自由度手腕 5
2.2两自由度手腕 5
2.3三自由度手腕 6
2.4机器人腕部结构选型 7
3腕部结构设计 9
3.1手腕结构的选择 9
3.2传动装置的设计与计算 11
3.2.1选择电机 11
3.2.2锥齿轮的设计 13
3.2.3带轮和齿形带选型 15
3.2.4输出轴的设计 18
3.2.5传动轴的设计 19
3.2.6轴的强度校核 20
3.2.7壳体的设计 24
4控制系统的设计 25
4.1机器人控制的介绍 25
4.1.1机器人控制的特点 25
4.1.2机器人控制的分类 25
4.1.3机器人控制系统 27
4.2机器人手腕控制方式的选择 28 [资料来源:www.THINK58.com]
4.2.1 PLC控制 28
4.2.2单片机控制 28
4.3控制系统结构设计 29
4.4可编程控制器IO接线图 30
4.5 PLC梯形图绘制 32
5.成本估算 34
6.结论 35
参考文献 36