
�����������ܲ��������˽ṹ��������(��CADͼ,SolidWorks��άͼ)

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.���Ͻ���ѧϰ�ο�֮��.
�� �� ��
�����������ܲ��������˽ṹ��������(��CADͼ,SolidWorks��άͼ)(������,���ⱨ��,���ķ���,����˵����14000��,CADͼ5��,SolidWorks��άͼ)
ժҪ
���������ij��֣��Գ����г�������ռ�ϴ�����Ļ��������з�ʽ����������Ӱ�죬һ���̶�������˷ǻ������������ڳ��г����е�ռ�ȣ�����������������������ͬʱҲ�Գ��н�ͨ�����һ��Ӱ�졣��Щ����ʹ���깲���������������ͣ�ţ��Գ��н�ͨ�����������������˺ܴ��ѹ���Ҵ������ɿص�Σ�����ء�
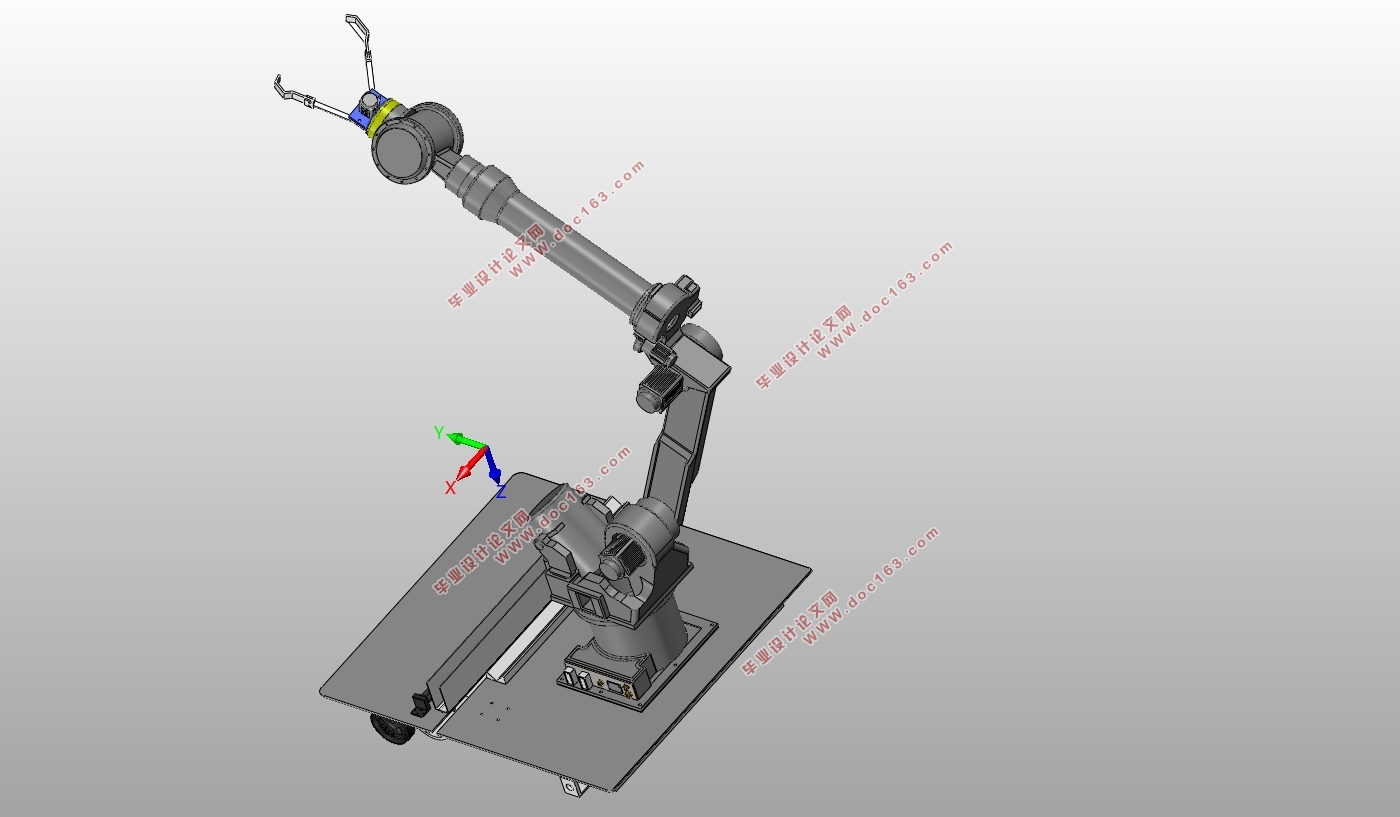
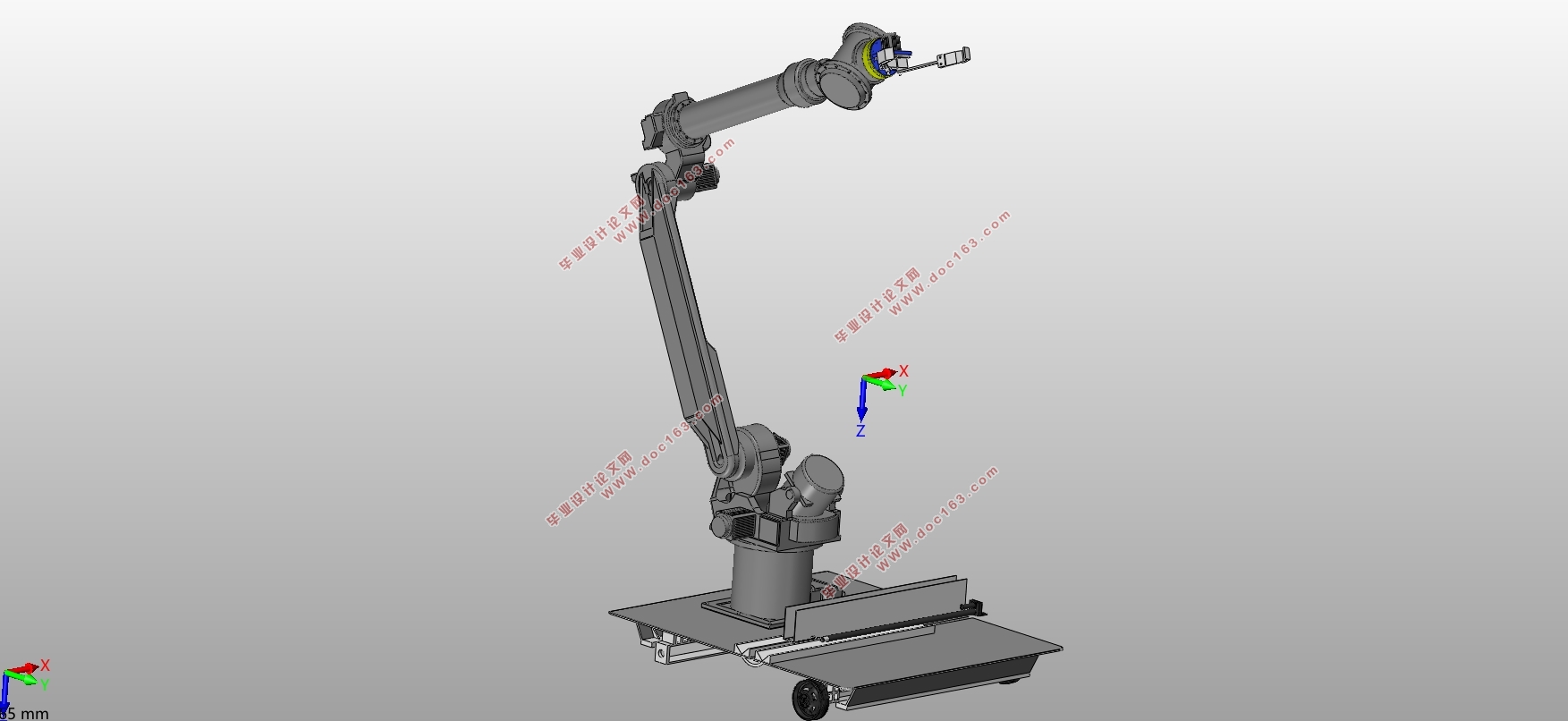
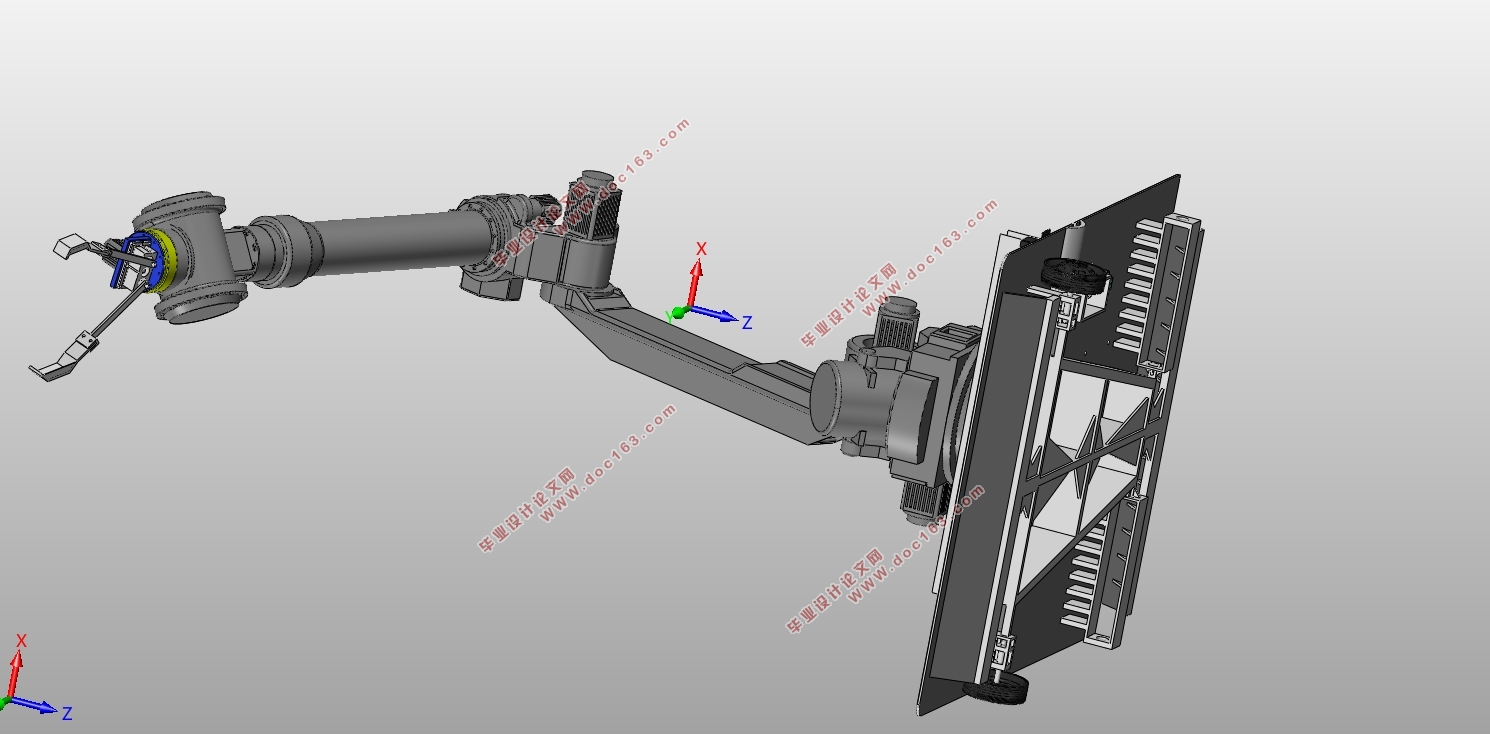
��������˵������ܲ��������������Ŀǰ������������ͣ�ҷ����� �������дӻ�е���ѡ�͵���ά��ģ���ٵ��˶�ѧ�����Լ�Ӧ�����棬������һ���Ĺ��ڵ������ܲ��������˵Ľṹ��Ƽ��˶�����������������Ϊ������Ƶ������ƶ����˻���������о��ṩһ���̶��ϵĽ�������ȣ�������Ҫ�ﵽ�Ĺ���Ҫ��ȷ���˵������ܲ��������˵Ĺ��ͷ��������������Ҫ�����˵���Ҫ�ߴ���������Ȼ��ѡ����������������Solidworks �����������˵���Ҫ�������ֵ���άģ����Ʋ�����ֱ�۵�չʾ������ͨ����ϸ����õ����ܲ������������������Ҫ�����������Ӷ��������㲿������ѡ�͡����ս������������ܲ��������˵���ά����ģ��������չ�ֳ�������Σ���ģ�ͽ���һ���ļ������������Ԫ����������������Ƶĵ������ܲ��������˽����о�����֤�������ܲ��������˵�ǿ�Ⱥ���������ܹ�����ʹ��Ҫ���Ҿ������õĶ�̬���ԣ���������������������ڶԵ������ܲ���������������ѧ֪ʶ������ϸ���˶�ѧ�������������� D-H �˶�ѧ��ѧģ�ͽ������������ܲ��������˷������㲢���յõ��˶�ѧ�����⡣ [��Ȩ���У�http://think58.com]
�ؼ��ʣ��������ܲ��������ˣ��ṹ��ƣ�����Ԫ�������˶�ѧ����
Abstract
The emergence of shared bicycles has had a significant impact on the motor vehicle travel mode that has long accounted for a large proportion of the city’s long-term, to a certain extent, increased the proportion of non-motor vehicle travel in urban travel, and of course also caused certain urban traffic. influences. Shared bicycles are parked at random and hinder the orderly operation of urban traffic.
In this paper, a bicycle intelligent parking robot is designed to solve the current problem of random parking and sharing of bicycles. From the selection of mechanical design to three-dimensional modeling, to kinematics simulation and stress simulation, the article gives a complete set of intelligent information about bicycles. Structure design and movement analysis method of parking robots. And can provide a certain degree of reference for similar future autonomous mobile handling robot design research. First of all, according to the work requirements to be achieved, the configuration scheme of the intelligent parking robot for the bicycle is determined, and the main dimensions of the robot are calculated according to the design requirements, and then the drive mechanism is selected. The 3D modeling software Solidworks was used to design the main driving part of the robot. Through the calculation of the main parts of the operating parameters, and then complete the selection of parts. Finally, the three-dimensional model of the entire bicycle intelligent parking robot is obtained. Secondly, the model is simplified to make full use of the finite element analysis tool to study the designed intelligent parking robots, so as to ensure that the strength and design life of intelligent parking robots can meet the requirements of use and have good dynamic characteristics. Resonance does not occur easily. Again, the kinematics of the palletizing robot is analyzed, the kinematics mathematical model of the robot is established using the D-H method, and the kinematics forward and inverse solutions are analyzed and calculated.
Keywords: Bicycle smart parking robot ; Structural design�� finite element analysis ; motion simulation
�������ܲ���������Ʒ���
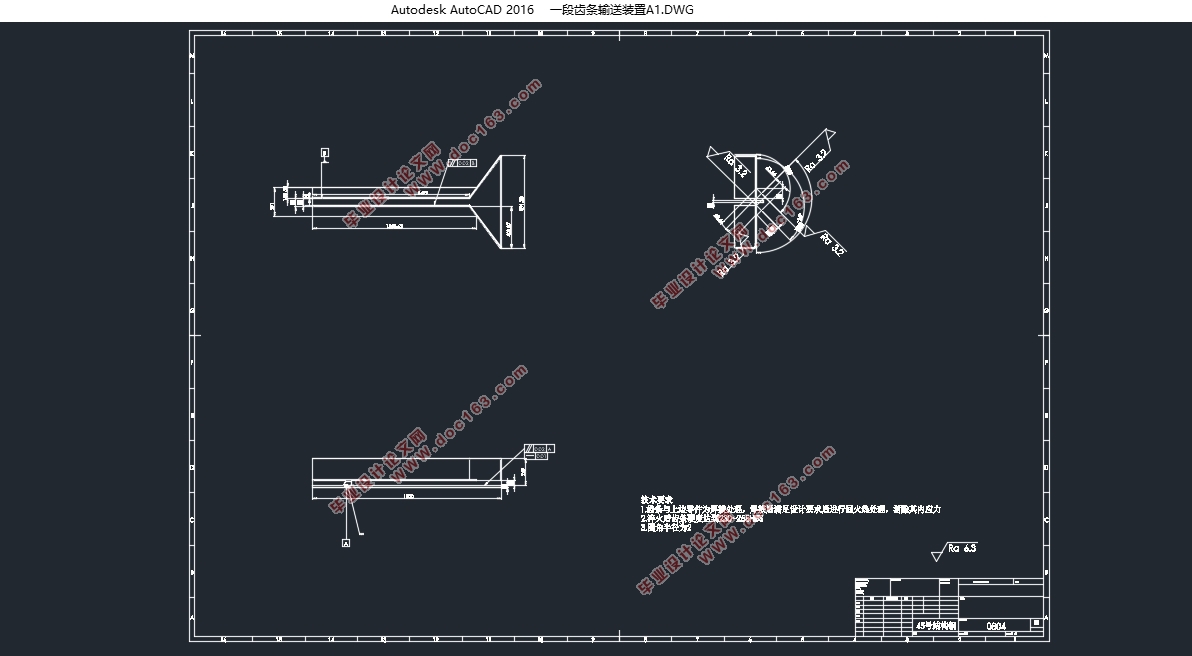
�������ܲ���������������ƣ�����Ҫ�����������Ĺ���Ҫ��Ե������ܲ��������˽ṹ���������滮��������Ϊ��Ҫ����Ҫ��ϸ���ǻ��ڵ������ܲ���������ʵ�õĽṹ���ܻ����϶������;����Եȷ�����з���������ȷ���������ܲ��������˵Ĺ��ͷ��� ��������ȷ���������ܲ��������˹���Ҫ���ͷ����Ļ����ϣ�ȷ���˵������ܲ��������˵Ļ����ߴ磬�����ά��ģ����Ҫ������ѡ�͡�
����������Ƶĵ������ܲ��������˶�������ͣ�ŵĵ������������ܲ����������ܹ������������ʺ�ָ����ͣ��������������ܵ�����ͣ����ڴ������Ҫ��15kg���ڵĵ�������3m*100m�ĵ������ͣ�ŵ��涨λ�õľ������ܹ���1-2��������ɲ������̣��������ܲ����������ܹ���ΪѸ�ٵIJ�����Ϊ���Ƶ������ƶ����ܽ�Ϊȷ�����رܿ��ϰ����Է�ֹ��ײ��
��Ʋ�����
1.�����Ч�� : 40��/Сʱ
2 .��װ��ʽ :�����ƶ�ʽ
3 .��������������צ��: 20kg
4 . ���г��ߴ磺 26�磨���֣���������
5 .������Χ �������ƶ�С��:3m*100m����ʵ��90��ת�䣩 [������Դ��http://think58.com]
��е�ֱۣ�ֱ��3m��Բ���˶���Χ
6 .λ���ظ����� ±0.5mm
7 .�������������������������е�ֱۣ�����װ�ã���ֱ����������������ƶ�С����
8 .���������¶� -15��~45��
��е�ֱ۵�ѡ��
�������ҵ��е�ּ����������죬���ĸ������Ҫ�������㹦�ܵ�ǰ���£�ֱ��ѡ�ù�˾Ͷ�������Ļ�е�ֱۣ����˶����������¡�
�������ܲ����������������ƶ�С���빤ҵ��е�ֱ���������ɣ���е����Ҫ��ȡ�����г���Լ��15kg�������뾶3000mm,��е����Ҫ������¶�����
��1����ͣ����Χ��ȡһ�����г�
��2�������г����������ƶ�С����
��3��������װ����ϣ���е�ֱ���ֱ���˶��������г�ͣ��ͣ����
��4����λ
��е�ֱ�ѡ��KUKA��˾�ͺ�KR 22 R3200�ͣ�����������£�
����˶���Χ ��3200mm
����ɣ� 22 kg
��ܸ��� ��22 kg
λ���ظ����� (ISO 9283) ��± 0.04 mm
������5
ռ�������690 mm x 570 mm
���� ��Լ 325 kg


Ŀ ¼
��1�� ���� 1
1.1��������������� 1
1.2���˻����˹����ⷢչ����״ 1
1.2.1���˻����˹����о���״ 2
1.2.2���˻����˹��ڳx����״�� 2
[������Դ��http://www.THINK58.com]
�� 2 �� �������ܲ������������ 3
2.1 �������ܲ���������Ʒ��� 3
2.2 �������ܲ����������㲿����� 3
2.2.1 ������ʽ��ȷ�� 6
2.2.2��е�ֱ۵�ѡ�� 7
2.2.3�����ƶ�С���������������ѡ�� 8
2.2.4����������������ٻ���ѡ�� 9
2.2.5�������������� 10
2.2.6 ���г����͵������������ѡ�� 11
2.2.7 ���ֳ����ļ��㼰ѡ�� 13
2.2.8�綯�Ƹ˵�ѡ�� 14
2.2.9 ��еץ����������Լ������ٻ���ѡ������� 15
�� 3 �� �������ܲ�����������Ҫ����������Ԫ���� 18
3.1�����ķ��㸲У�� 18
3.2�����ķ��� 19
3.3����ת��ķ��� 21
��4�� �������ܲ����������˶�ѧ���� 24
4.1�������ܲ����������˶�ѧ���� 24
4.2�������任 24 [������Դ��http://www.THINK58.com]
4.3 D-H��ʾ�� 26
4.4�������ܲ����������˶�ѧ���� 28
��5�� ���� 30
����� 31
��л 31 [������Դ��http://www.THINK58.com]
��һƪ��˫�ܲ������ؼ���е�ṹ���(��CAD���ͼװ��ͼ)
��һƪ�������������ķ�����������(��CAD���װ��ͼ)