
工业机器人夹持器的设计(含CAD零件装配图)

以下是资料介绍,如需要完整的请充值下载.
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
资料介绍:
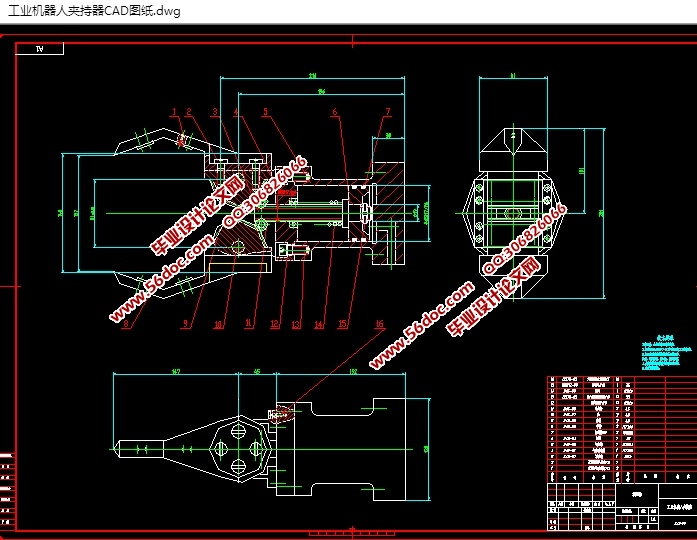
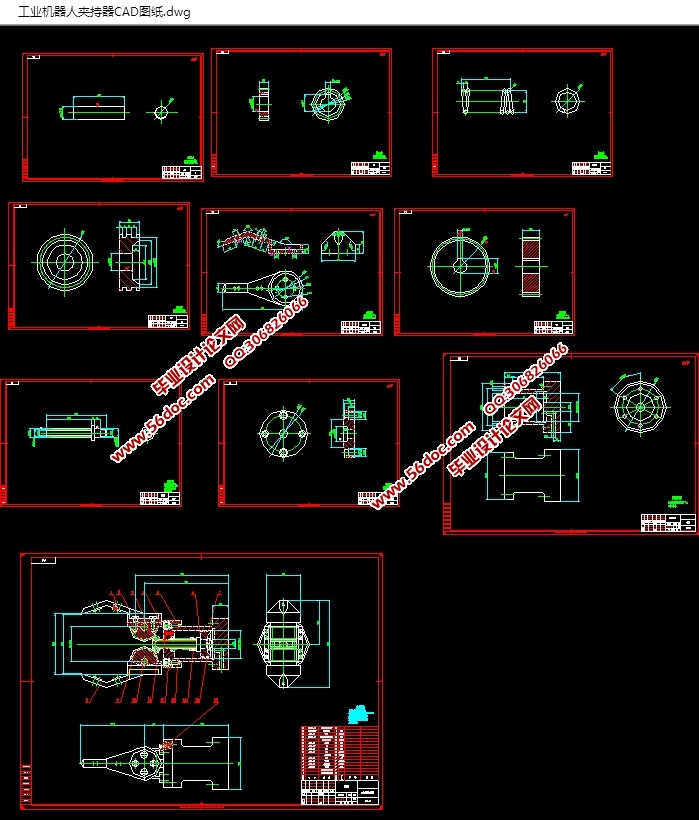
工业机器人夹持器的设计(含CAD零件装配图)(论文说明书12000字,外文翻译,CAD图纸10张)
摘 要
本次的设计来源于工业机器人夹持器机构更新换代基础之上,通过设计出工业机器人夹持器,从而来满足当今工业机器人组成机构之一的夹持器各方面性能不足的缺陷。本毕业设计课题来自于企业的生产实际,通过设计出新型工业机器人夹持器,从而来掌握工业机器人夹持器的整个设计生产流程,培养工程意识。
我国生产的工业机器人夹持器从仿制开始起步,近期产品的质量较早期有所提高。但受国产配套件质量及设计水平等的影响,我国目前生产的工业机器人夹持器的总体水平与进口产品及港口用户的要求仍有较大差距,工业机器人夹持器的生产也是如此,为满足市场需求,开发出一种新型的工业机器人夹持器势在必行!
本文通过运用大学所学的知识,提出了工业机器人夹持器的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了工业机器人夹持器总的指导思想,从而得出了该工业机器人夹持器的优点是高效,经济,并且安全系数高,对提高工业机器人的工作效率,减少人工投入,增强夹持质量等等起到了很大的作用的结论。
[来源:http://www.think58.com]
关键词:工业机器人夹持器;高效;人工投入;结论
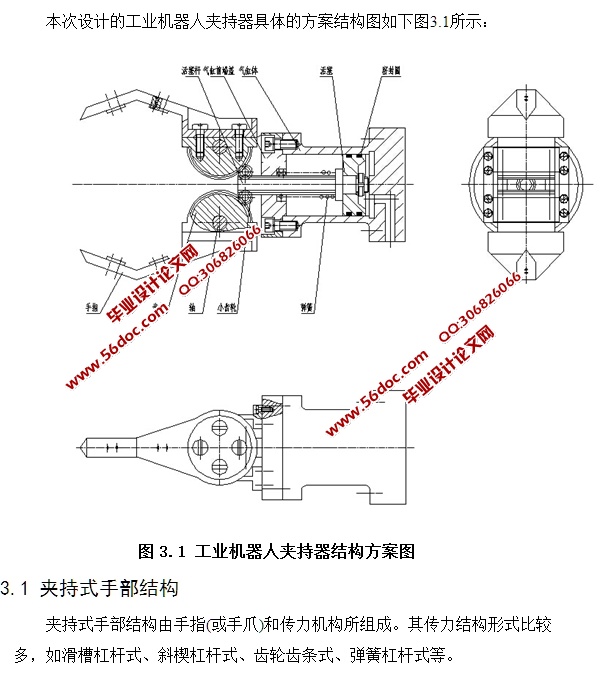
夹持式手部结构
夹持式手部结构由手指(或手爪)和传力机构所组成。其传力结构形式比较多,如滑槽杠杆式、斜楔杠杆式、齿轮齿条式、弹簧杠杆式等。
3.1.1 手指的形状和分类
夹持式是最常见的一种,其中以二支点回转型为基本型式。当二支点回转型手指的两个回转支点的距离缩小到无穷小时,就变成了一支点回转型手指;同理。
3.1.2 设计时考虑的几个问题
(一)具有足够的握力(即夹紧力)
(二)手指间应具有一定的开闭角
(三)保证工件准确定位
为使手指和被夹持工件保持准确的相对位置,必须根据被抓取工件的形状,选择相应的手指形状。例如圆柱形工件采用带“V”形面的手指,以便自动定心。
(四)具有足够的强度和刚度
(五)考虑被抓取对象的要求
[资料来源:www.THINK58.com]
目 录
1 绪论 1
1.1 课题的来源与研究的目的和意义 1
1.2 工业机器人的组成 2
1.2.1工业机器人的组成 3
1.2.2 工业机器人的分类 4
[来源:http://think58.com]
1.3 国内外发展状况 5
1.4 工业机器人的成本与人工成本的比较 6
1.5 工业机器人的作用 8
2 工业机器人的设计方案 10
2.1 座标型式与自由度的设计 12
2.2 手部结构方案的设计 14
2.3 手腕结构方案的设计 15
2.4 手臂结构方案的设计 16
3 工业机器人夹持器结构的设计 18
3.1 夹持式手部结构 20
3.1.1手指的形状和分类 22
3.1.2设计时考虑的几个问题 24
3.1.3手部夹紧气缸的设计 26
3.2 气缸驱动力矩的计算 28
3.3 气缸驱动力矩的计算校核 29 [资料来源:http://www.THINK58.com]
4 工业机器人夹持器中关键零部件的强度计算与校核 30
4.1 齿轮的强度计算与校核 32
4.2 轴的强度计算与校核 33
结论 34
致谢 35
参考文献 36 [来源:http://think58.com]