
直线引导机构运动仿真设计(含CAD零件装配图,SolidWorks三维图,视

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
直线引导机构运动仿真设计(含CAD零件装配图,SolidWorks三维图,视频)(论文说明书8790字,CAD图纸8张,SolidWorks三维图,视频)
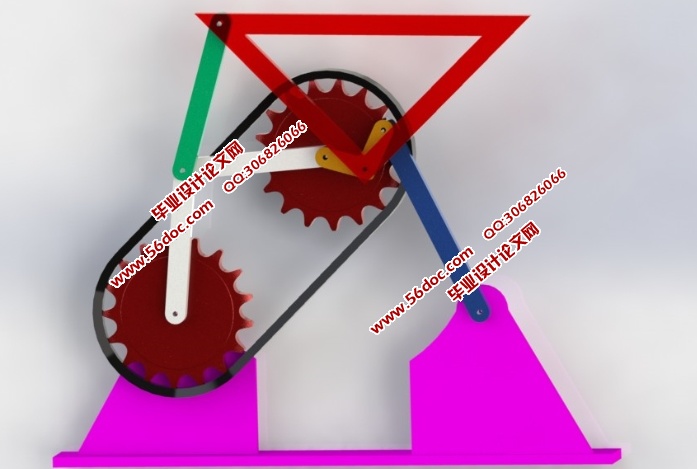
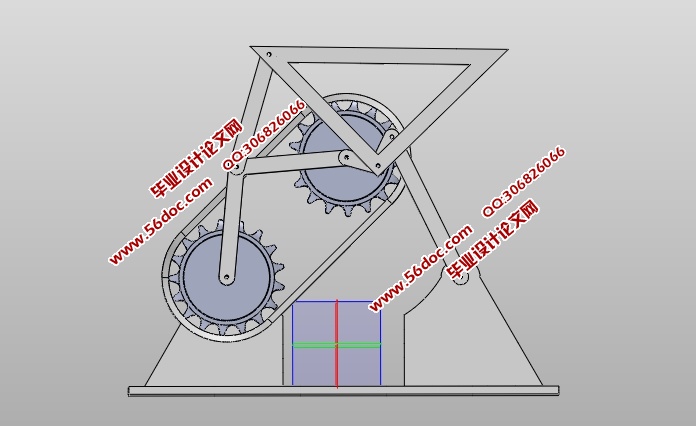
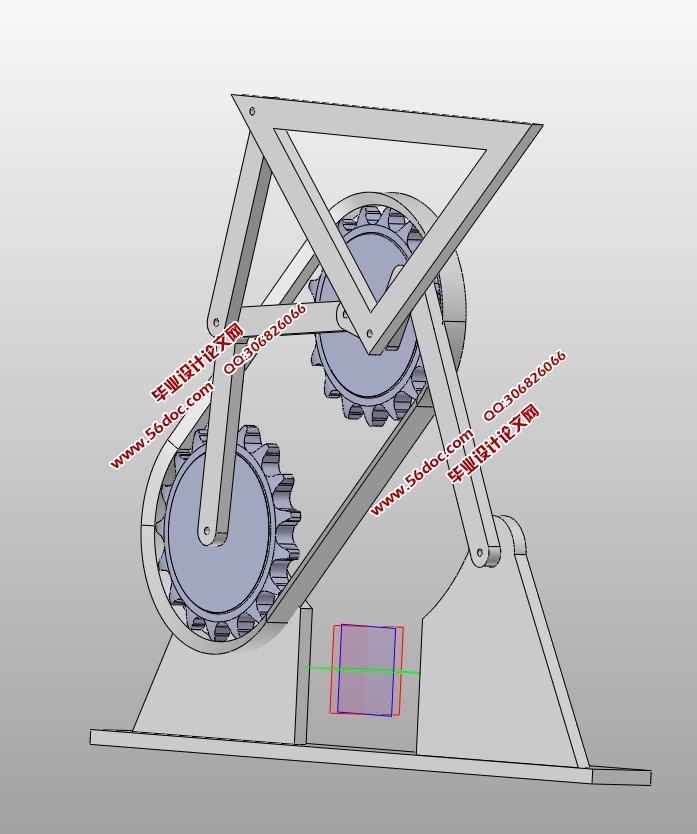
总体设计分析
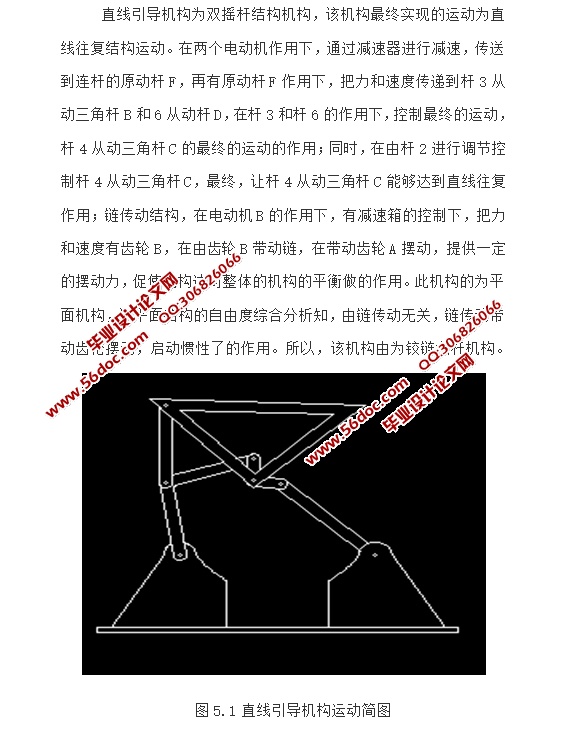
直线引导机构为双摇杆结构机构,该机构最终实现的运动为直线往复结构运动。在两个电动机作用下,通过减速器进行减速,传送到连杆的原动杆F,再有原动杆F作用下,把力和速度传递到杆3从动三角杆B和6从动杆D,在杆3和杆6的作用下,控制最终的运动,杆4从动三角杆C的最终的运动的作用;同时,在由杆2进行调节控制杆4从动三角杆C,最终,让杆4从动三角杆C能够达到直线往复作用;链传动结构,在电动机B的作用下,有减速箱的控制下,把力和速度有齿轮B,在由齿轮B带动链,在带动齿轮A摆动,提供一定的摆动力,促使机构达到整体的机构的平衡做的作用。此机构的为平面机构,该平面结构的自由度综合分析知,由链传动无关,链传动带动齿轮摆动,启动惯性了的作用。所以,该机构由为铰链六杆机构。
 [资料来源:http://think58.com]
[资料来源:http://think58.com] 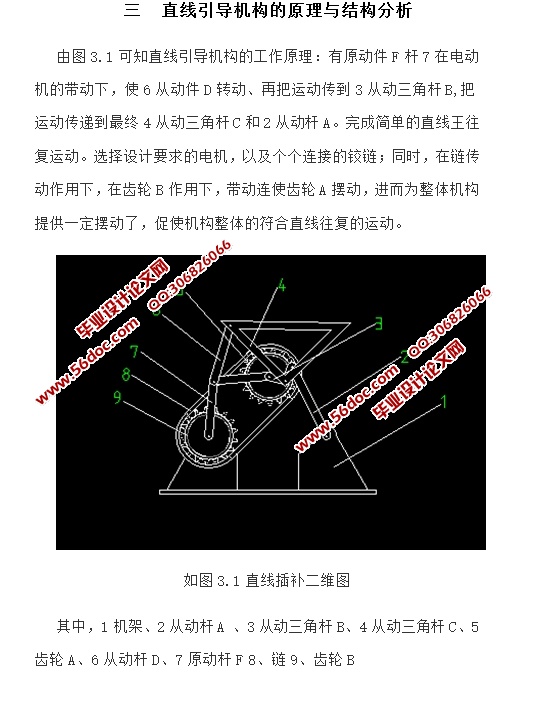
[资料来源:www.THINK58.com]
目 录
摘要...........................................................................................................1
一 绪论..........................................................................................................2
二 连杆机构概述...........................................................................................3
三 直线引导机构的原理与结构分析...........................................................4
四 直线引导机构的运动分析.......................................................................6
4.1 直线引导机构自由度的计算..........................................................8
五 直线引导机构的结构设计.....................................................................10
5.1 工作条件的确定................................................................................11
5.2 总体设计分析....................................................................................14
[资料来源:www.THINK58.com]
5.3 链传动的设计....................................................................................17
5.4 电机的选择........................................................................................20
5.5 减速器的选择....................................................................................22
5.6 连传动的设计的选择........................................................................23
5.7 底座的设计........................................................................................23
5.8 各杆长度设计 ..................................................................................23
六 直线引导机构的有限元分析.................................................................24
结 论.........................................................................................................25
参考文献.........................................................................................................26 [资料来源:http://www.THINK58.com]
谢 辞.........................................................................................................27