
水下网衣清洗机器人的设计(含CAD零件图装配图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
水下网衣清洗机器人的设计(含CAD零件图装配图)(开题报告,论文说明书13000字,CAD图9张)
摘 要
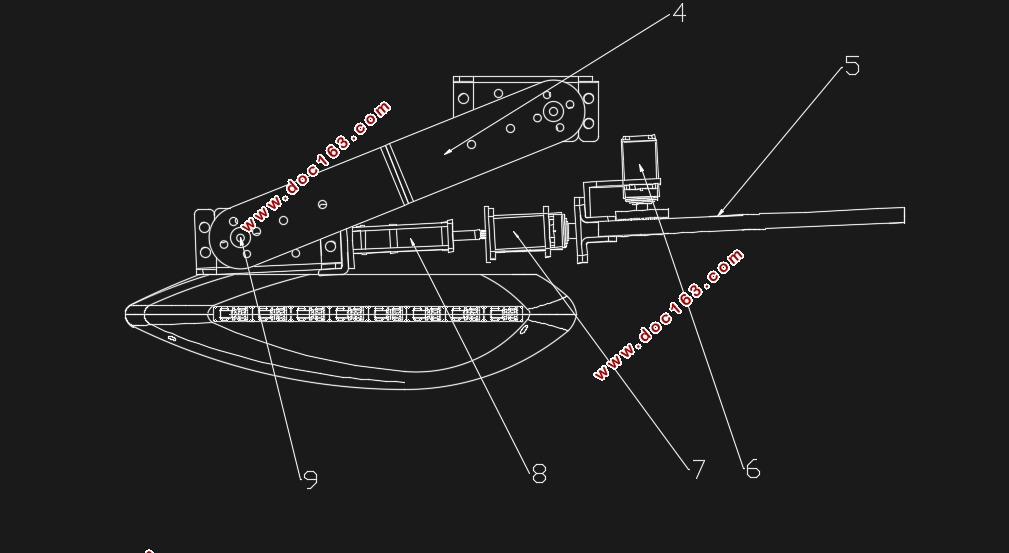
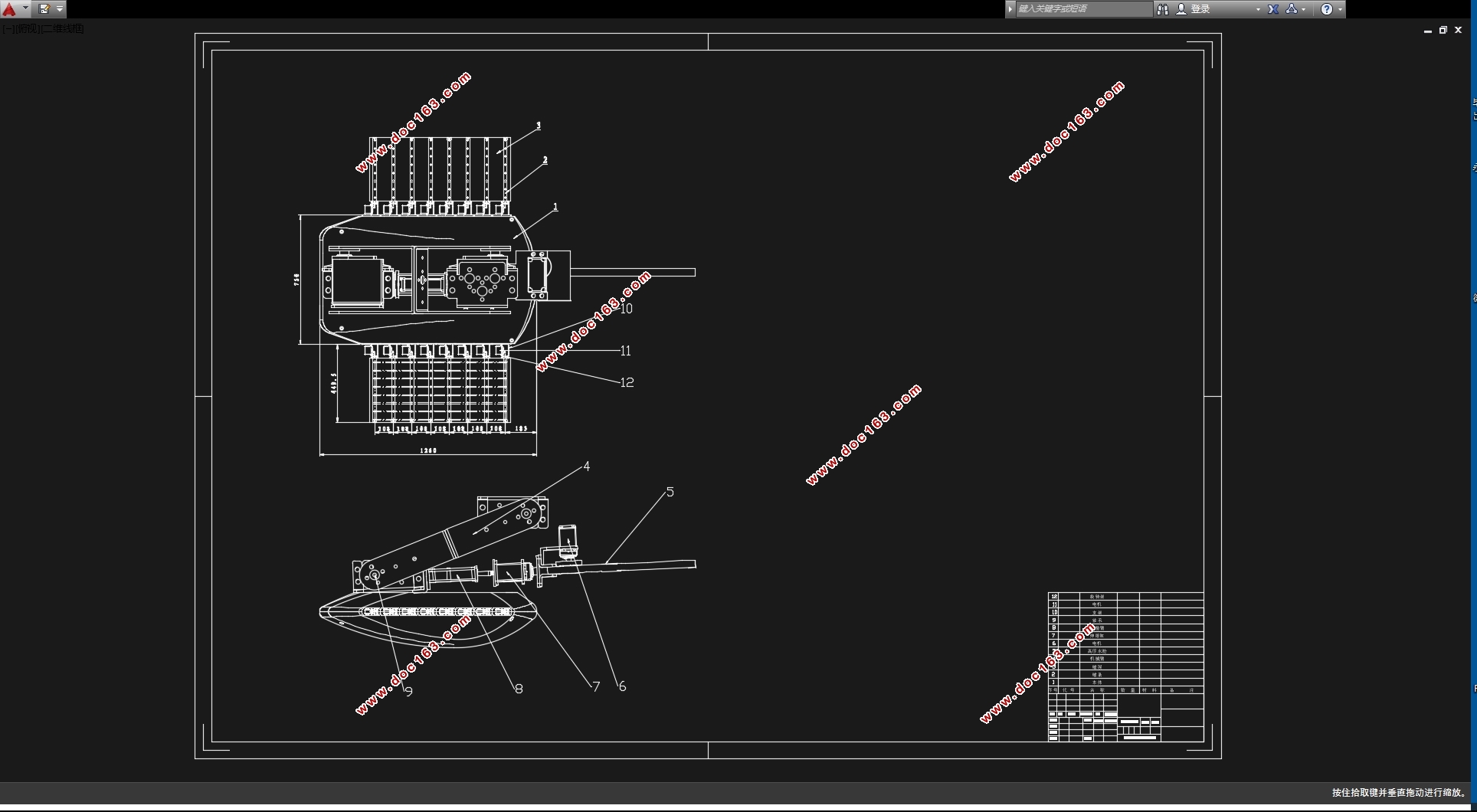
海洋,这个涵盖了世界表面积约四分之三的"蓝色领土",不仅蕴含着比土地面积更宝贵的粮食、资源和矿藏,而且还为开展洲际货物运输和发展军备计划创造着重要的通道。因此在世界已经这么繁荣的今天,资源却仍然是日益短缺的当下,对海洋的有效利用仍然是人类亟待解决的课题,,同时也为国际洲际货物运输和军备战略提供了宝贵的通道。因此在社会如此发达的今天,食物依然是日益紧缺的当下,对海洋的开发利用是人类亟待解决的问题,也是人类维持自身发展、拓展生存空间最为切实有效的途径。随着人类对海洋资源开发脚步的不断加快,具有海洋勘测、环境保护、海底管道检测、海洋救捞以及水下跟踪侦查功能的水下机器人已成为探索开发海洋资源和近海防卫的重要手段,具有巨大的潜在价值和广阔的应用前景。本文是针对深海网箱养殖行业开发的一种可以深海清洁网箱的机器人。这种机器人可以直接在深海环境将网箱外表面的垃圾打扫干净,免于将网箱拖出水面进行打扫,节省了大量的养殖时间和人力成本。
关键词:深海;网箱清洗;海洋
ABSTRACT
The ocean, as a "blue territory" covering three-quarters of the earth's surface, not only contains food, energy and minerals that are more abundant than land, but also provides a valuable passage for international intercontinental cargo transportation and armament strategy. Therefore, in today's society is so developed, food is still increasingly scarce, the development and utilization of the ocean is an urgent problem for human beings, and it is also the most practical and effective way for human beings to maintain their own development and expand living space. With the continuous acceleration of human development of marine resources, underwater robots with marine survey, environmental protection, submarine pipeline detection, marine salvage and underwater tracking and reconnaissance functions have become an important means to explore and develop marine resources and offshore defense, with great potential value and broad application prospects. This article is a robot developed for the deep-sea cage farming industry that can clean cages in the deep sea. This robot can directly clean the garbage on the outer surface of the cage in the deep-sea environment, eliminating the need to drag the cage out of the water for cleaning, saving a lot of breeding time and labor costs.
Keywords: deep sea; cage cleaning; ocean
2.1设计基本思路
基本思路:
本次设计首先从设计养殖网衣清洗机器人的结构开始,重点在于抓住传动系统的组成进行研究,进而选出电动机的参数。结构设计完成之后开始进行传动方案的设计,进而对相关参数开始计算,根据机器人的基本参数计算传动系统各部件的数值,从而进行履带轮的结构设计以及各部件尺寸的选择,校核完计算数据无误后开始根据计算数据设计减速器,设计完成可以开始根据控制需求设计硬件电路,并编写程序流程图,最后即可绘制图纸。
框架:设计清洗机器人传动系统的结构(包括:传动系统的组成、电机参数的选择、);对机械传动系统进行设计计算(包括:传动方案的设计、基本参数的选择、带轮的结构设计、减速器的设计计算);根据养殖网衣控制需求设计硬件电路图;编写程序流程图。
[来源:http://www.think58.com]

目 录
第一章 绪论 5
1.1本课题的意义和目的 5
1.2国内外发展现状 6
第二章 总体方案设计 8
2.1设计基本思路 8
第三章 运动机构的设计 9
3.1运动机构的选型 9
3.2运动机构的设计方案 9
3.3本章小结 12
第四章 机械臂的设计 13
4.1臂部结构设计 13
4.2舵机选择 22
五 传动零件的设计计算 24
5.1 V带轮传动的设计计算 24
5.2 圆锥齿轮传动的设计计算 26
5.3 圆柱齿轮传动的设计计算 30
六 轴的设计计算 33
6.1 主动轴设计计算 33
6.2 锥齿轮输出轴设计计算 36
6.3 惰轮轴设计计算 39
七 键联接的选择及计算 40
7.1 电机与电动机带轮联接采用平键连接 41
7.2 主动轴与减速器机带轮联接采用平键连接 41
[资料来源:http://THINK58.com]
7.3 锥齿轮输出轴与小圆柱齿轮联接采用平键连接 41
7.4 锥齿轮输出轴与大锥齿轮联接采用平键连接 42
八 滚动轴承设计 43
8.1 主动轴的轴承设计计算 43
8.2 输出轴的轴承设计计算 44
九 传动装置的计算 46
9.1 电动机的选择 46
9.1.1 电动机的类型和结构分析 46
9.1.2 选择电动机的功率 46
9.1.3 确定电动机的转速 47
致 谢 50
参考文献 51
[资料来源:http://www.THINK58.com]