
汽车构件焊接机器人工作站建模设计(含CAD图,CATIA三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
汽车构件焊接机器人工作站建模设计(含CAD图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书12000字,CAD图6张,CATIA三维图)
摘要
随着时代的进步与技术的发展,焊接机器人工作站对汽车工业生产的帮助越来越大。焊接机器人工作站可以弥补传统手工焊接精度差、人工成本高等缺陷,不仅可以全面提高汽车工业生产产品的焊接质量还可以降低产品生产成本。国外焊接机器人工作站发展比较成熟,拥有许多成熟的技术和完整的机器人生产线,然而国内焊接机器人工作站在技术方面有许多不成熟的地方。
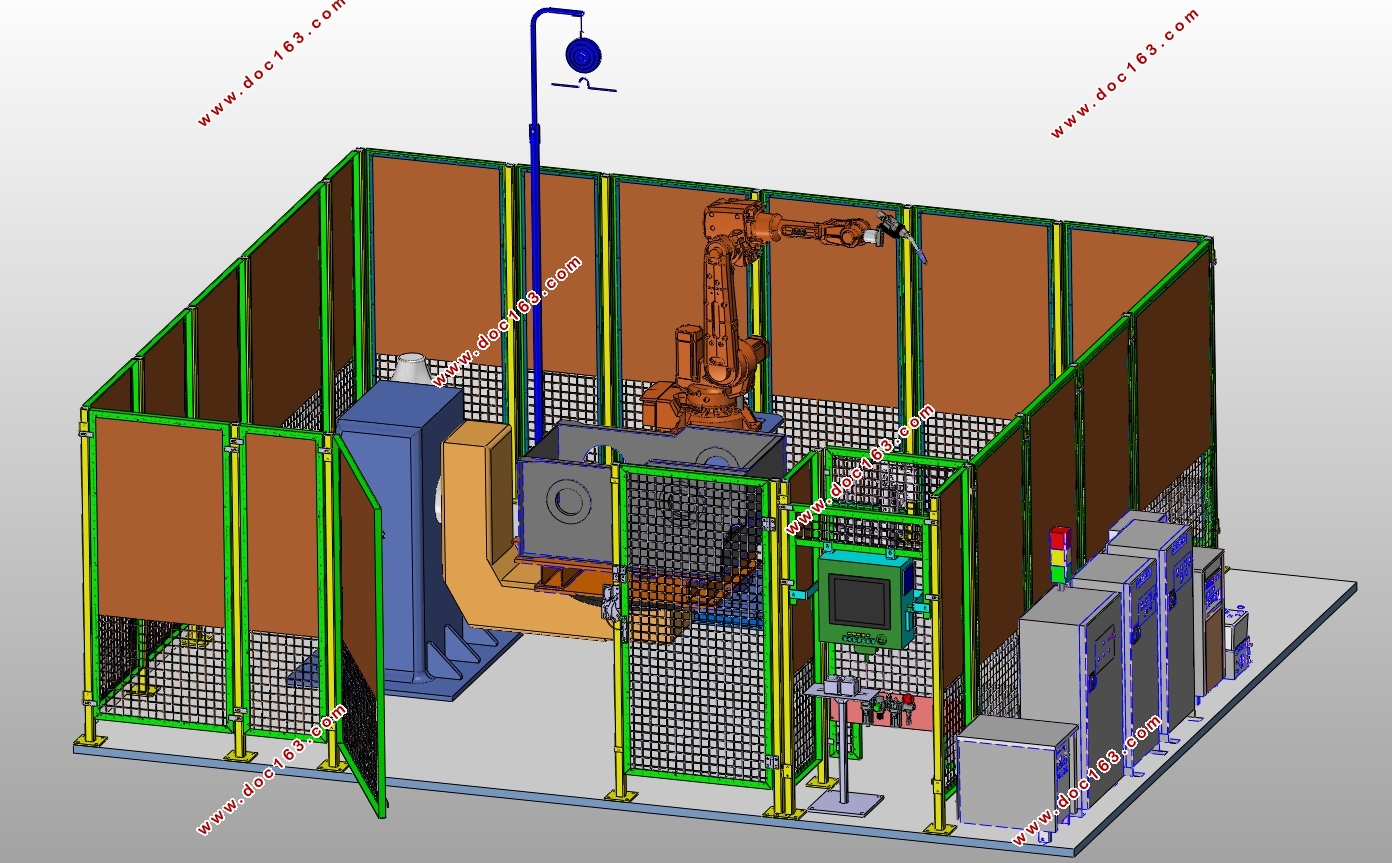
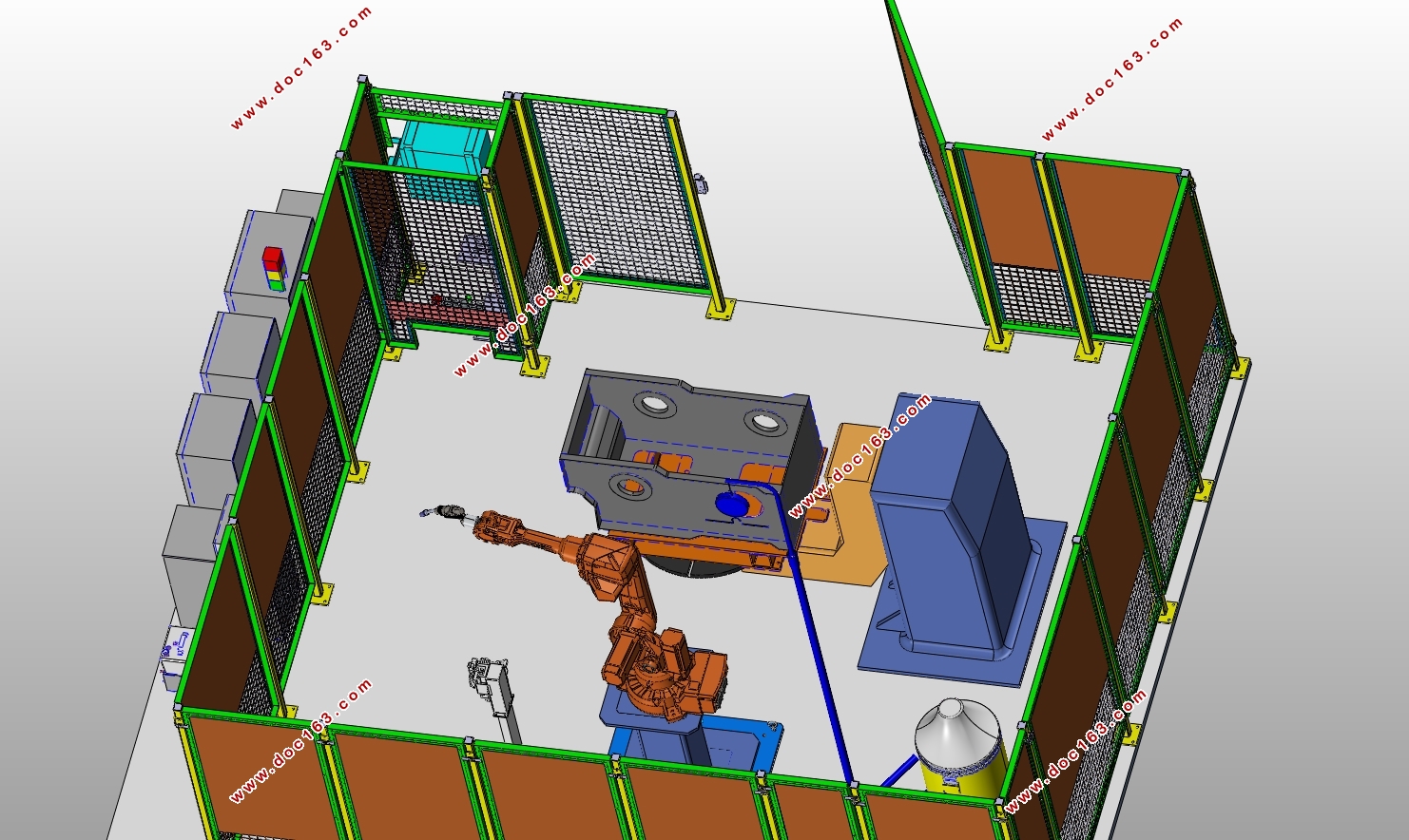
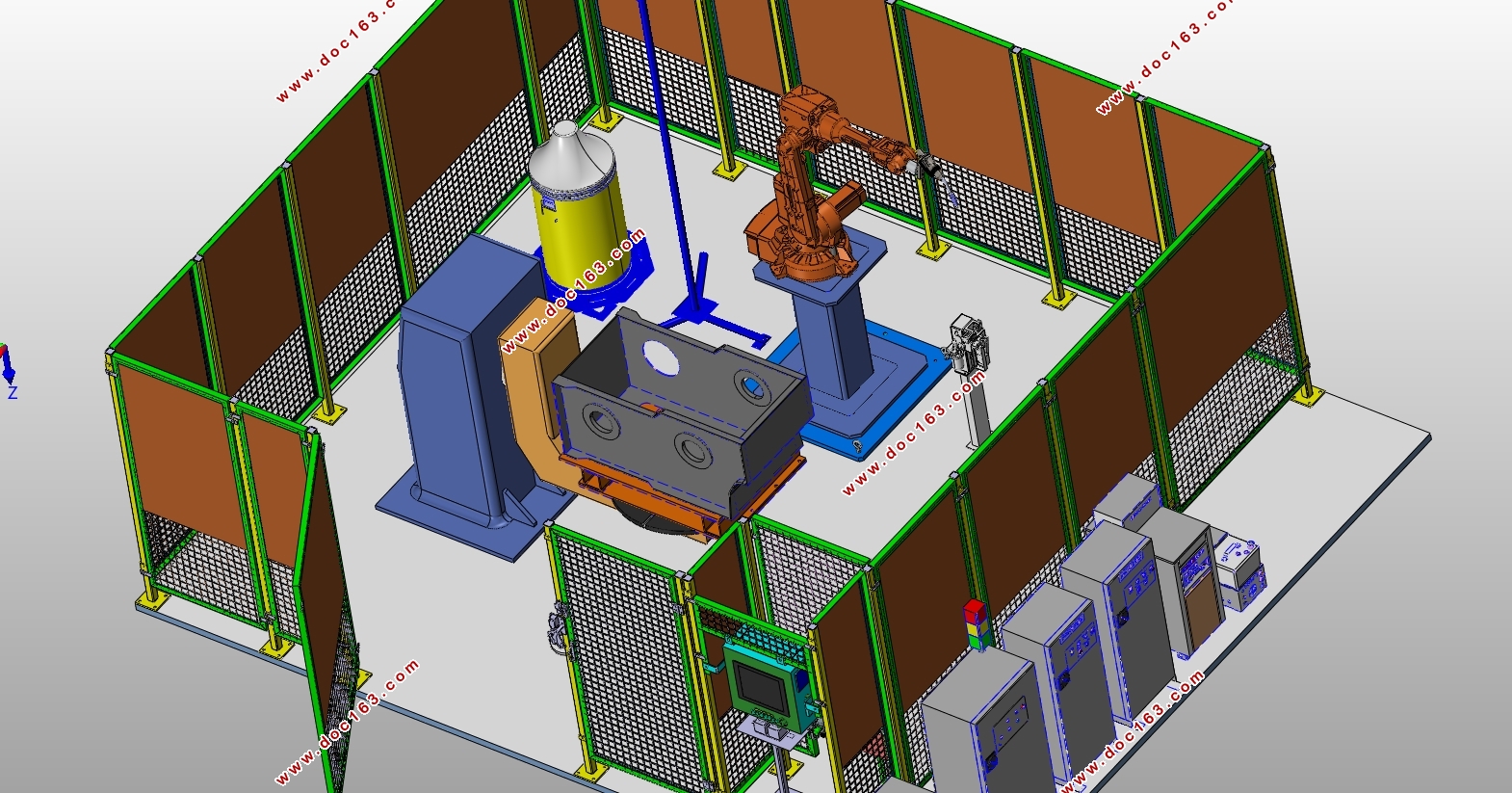
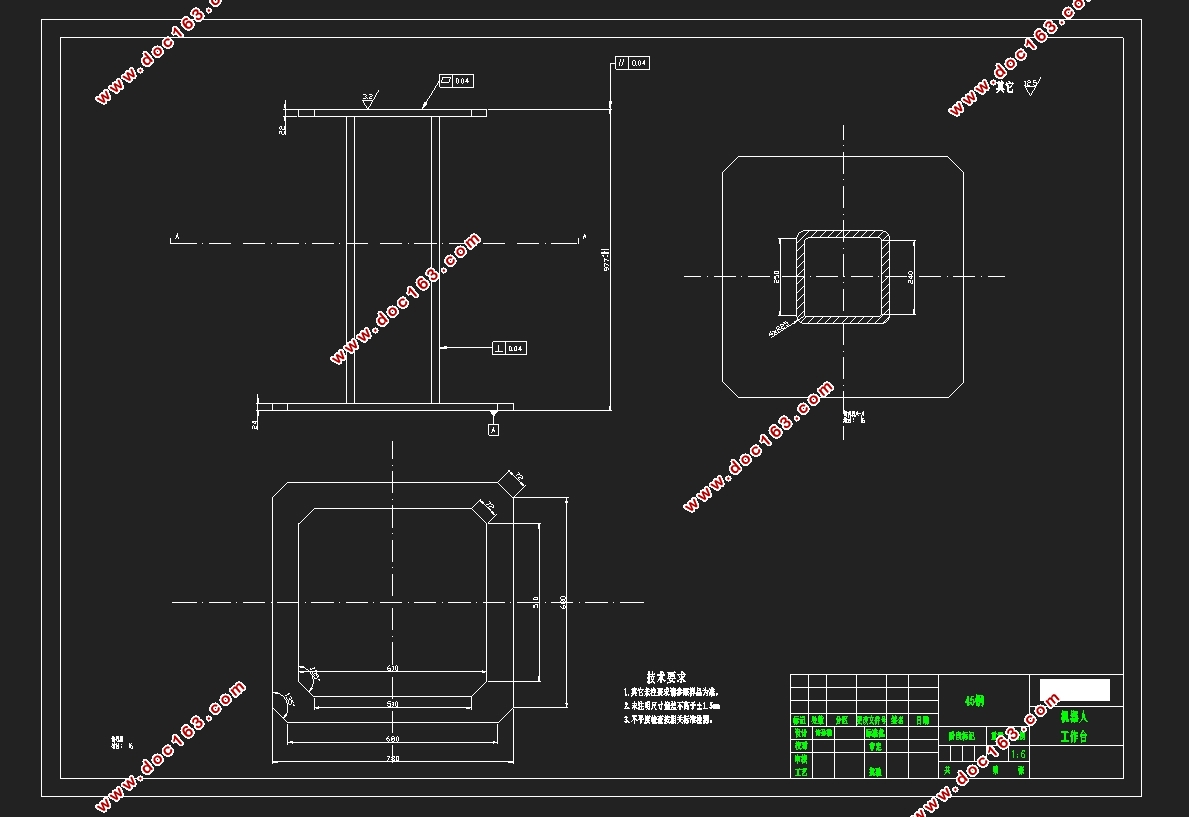
本次研究的焊接机器人工作站主要由焊接机器人,焊接设备,安全防护设备以及其他辅助设备组成,主要用于完成车辆油箱部件的自动化焊接工作。
本次研究选择304L不锈钢作为被焊油箱的材料,并根据所选材料的特性选择相对应的焊接工艺参数。在将焊接机器人工作站数学模型导入ADAMS软件之后,根据所选择的焊接工艺参数进行设置,同时设置被焊油箱的材料等等。最后根据装配关系在ADAMS软件中添加各类运动副进行运动学仿真建模。
完成运动学仿真建模之后,进行路径规划,首先完成了焊接机器人工作范围的检测并仿真了实际焊接工作的过程。完成仿真之后分析仿真结果,检验焊接工作过程是否存在运动干涉、焊接过程是否合理。还通过函数控制实现了焊接速度的控制以及引弧等复杂焊接动作的仿真。最后尝试利用逆运动学分析尝试实现更复杂的轨迹规划。
[版权所有:http://think58.com]
关键词:焊接机器人工作站;轨迹规划;运动学分析
Abstract
With the advancement of the times and the development of technology, the application of welding robot workstations is becoming more and more important for the production of the automobile industry. The welding robot workstation can make up for the defects of traditional manual welding like bad welding precision and high labor cost, which can improve the quality of the products produced by the automobile industry and reduce the production cost. The development of welding robot workstations abroad is relatively mature, with many mature technologies and complete robot production lines. However, there are many immature places in the domestic welding robot workstations.
The welding robot workstation of this research is mainly composed of welding robot, welding equipment, safety protection equipment and other auxiliary equipment, and is mainly used for the automatic welding work of vehicle fuel tank components.
In this study, 304L stainless steel was selected as the material of the welded oil tank, and the corresponding welding process parameters were selected according to the characteristics of the selected materials. After the mathematical model of the welding robot workstation is imported into the ADAMS software, the setting is performed according to the selected welding process parameters, and the material of the welded oil tank is set at the same time. Finally, the kinematics simulation modeling is carried out in the ADAMS software according to the special relationship. [资料来源:http://www.THINK58.com]
After completing the kinematics simulation modeling, the path planning is carried out, the welding robot working range is detected and the welding work process is simulated. After the simulation is completed, the simulation results are analyzed to check whether there is motion interference during the welding work and whether the welding process is reasonable. The control of welding speed and the simulation of complex welding actions such as arc ignition are also realized through function control. Finally, attempts to use inverse kinematics analysis to try to achieve more complex trajectory planning.
Key words: welding robot workstation; trajectory planning; kinematics analysis
[资料来源:http://think58.com]
[资料来源:http://www.THINK58.com]
目录
第1章 引言 1
1.1研究背景 1
1.2国内外研究现状 1
1.3研究意义 2
第2章 焊接机器人工作站结构 3
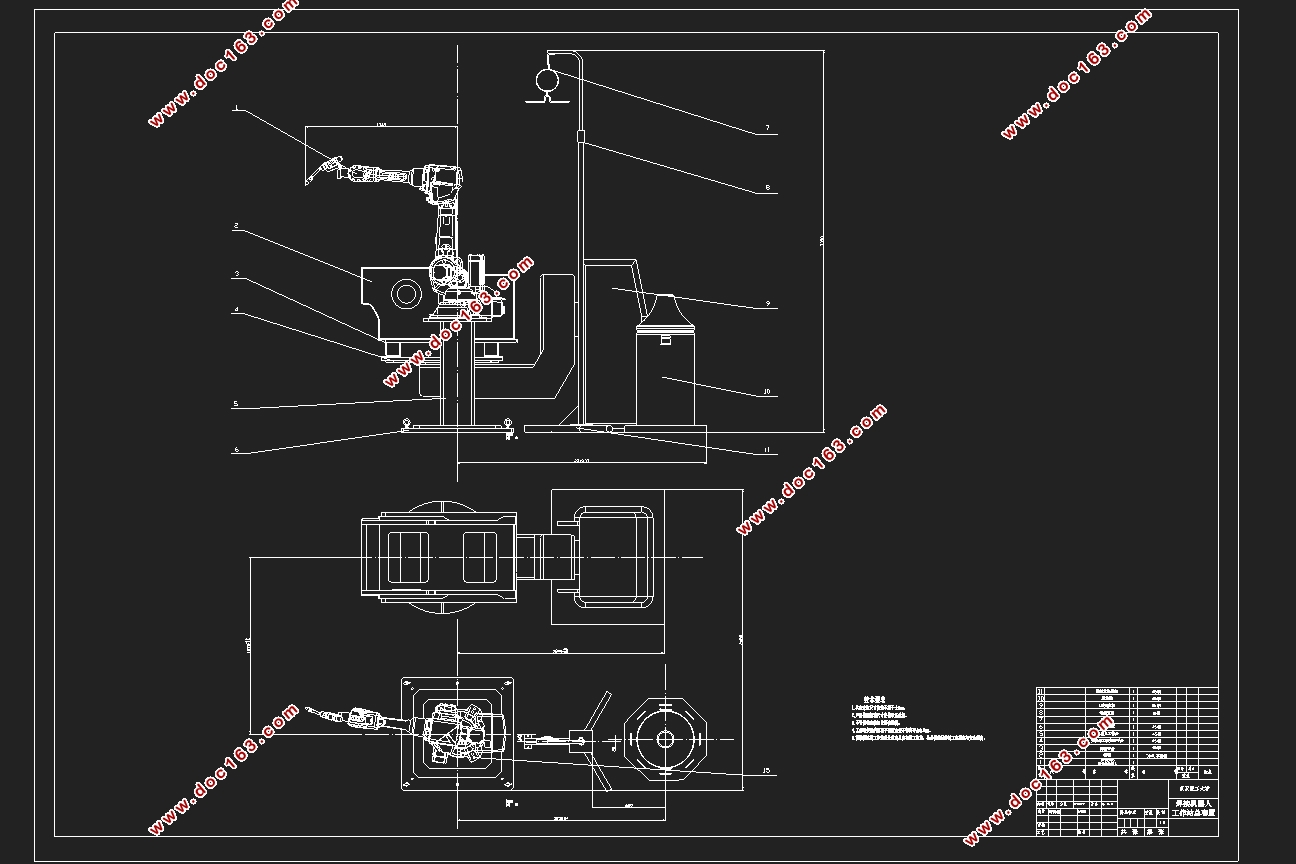
2.1焊接机器人工作站总体结构 3
2.2焊接机器人结构 4
2.3本章小结 4
第3章 焊接机器人工作站仿真模型建立 5
3.1焊接参数选择 5
3.1.1油箱材料选择 5
3.1.2焊接工艺参数的选择 5 [资料来源:THINK58.com]
3.1.3 GTAW焊接介绍 6
3.2建模仿真环境 6
3.2.1 软件介绍 6
3.2.2实体模型导入 6
3.3ADAMS运动学仿真模型建模 7
3.3.1 运动学仿真一般步骤 7
3.3.2工作环境设置 7
3.3.3 模型检验 9
3.4本章小结 9
第4章 ADAMS运动学仿真分析 10
4.1 焊接机器人工作站工作范围仿真分析 10
4.1.1分析的意义 10
4.1.2仿真准备 10
4.1.3仿真结果及分析 11
4.2焊接机器人工作路径规划及焊接过程仿真 12
4.2.1轨迹规划概述 12
4.2.2仿真准备 13
4.2.3利用step函数作为驱动函数 14
4.2.4 利用STEP函数控制焊接速度 15
4.2.5利用if函数控制焊接速度 15
4.2.6 关节转角测量 17
[资料来源:THINK58.com]
4.3引弧动作仿真 17
4.4在关节空间进行轨迹规划 20
4.4.1关节转角与时间关系方程 20
4.4.2利用运动学逆解实现路径规划 20
4.5本章小结 20
第5章 结论 23
参考文献 24
致谢 25 [资料来源:http://think58.com]