
基于机器人的碳纤维三维针织机械手设计(含SolidWorks三维图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于机器人的碳纤维三维针织机械手设计(含SolidWorks三维图)(任务书,开题报告,论文说明书14000字,SolidWorks三维图)
摘要
各行各业中开始广泛地使用新型复合材料,早在上个世纪便已在航空航天、军工等领域受到了重视与深入的研究。如何快速、高效地对复合材料零件进行缝合拼接是提高碳纤维材料的应用所面临的一个挑战。本文在收集了信息后选择设计一种可以由工业机器人搭载的通用的缝合设备。可以对三维复杂碳纤维材料零件进行自动缝合。本篇论文主要是从以下的几个方面来进行了描述分析:
(1)分析国内外现状,明确了碳纤维材料的应用范围与对复杂型件进行三维针织的需求。
(2)分析了双边针织技术和单边针织技术所具有的特点,并选择双针单线缝合技术进行设计。
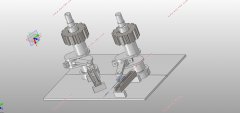
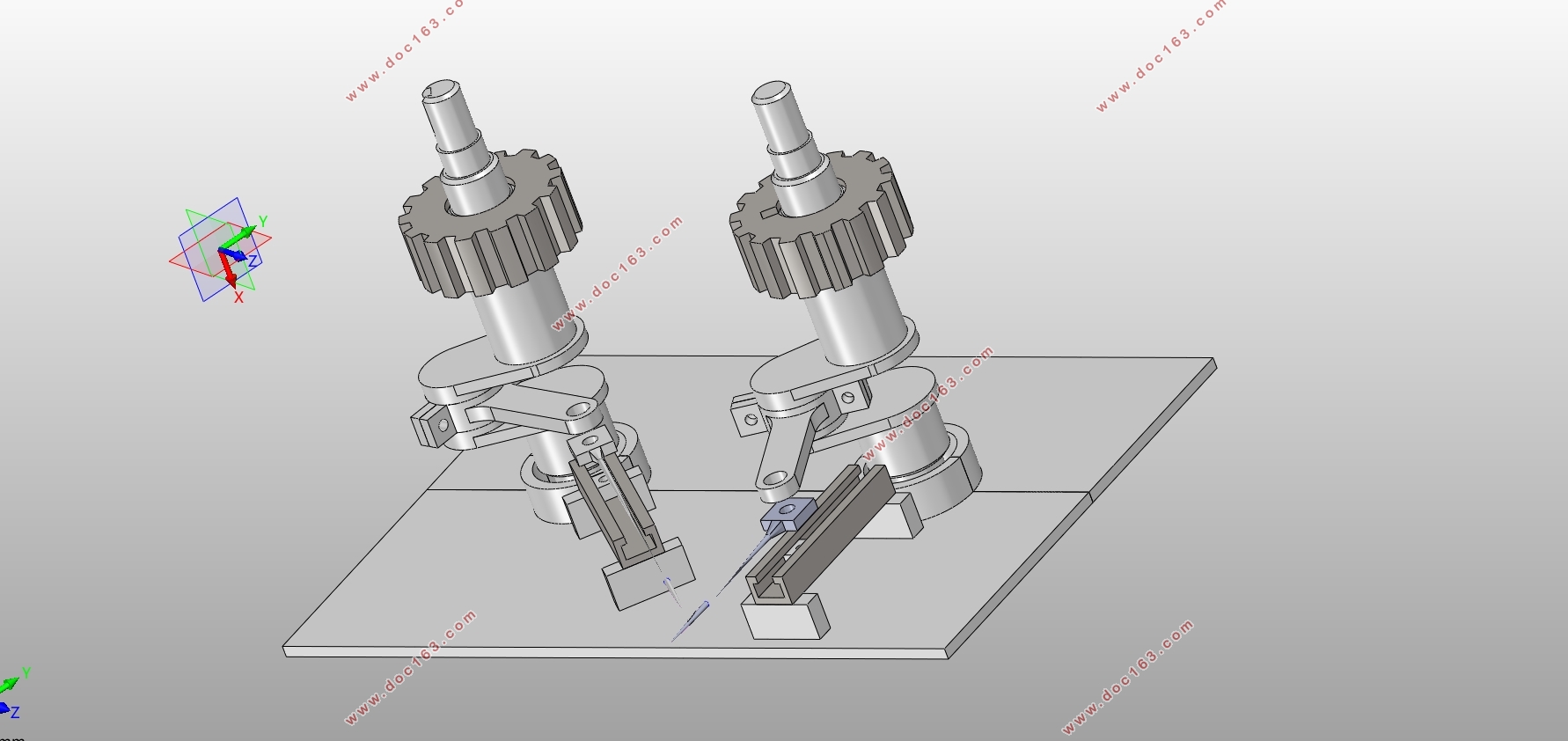
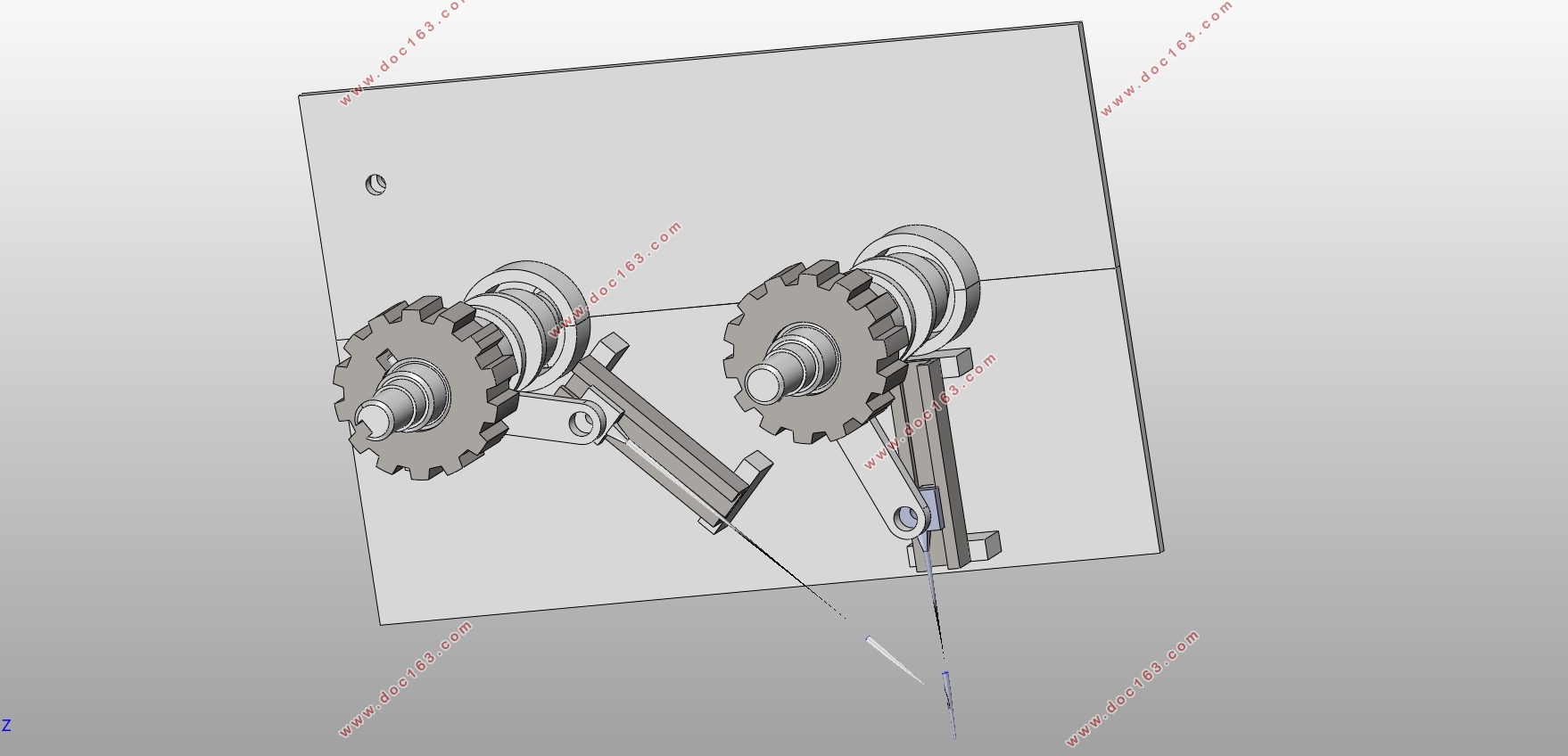
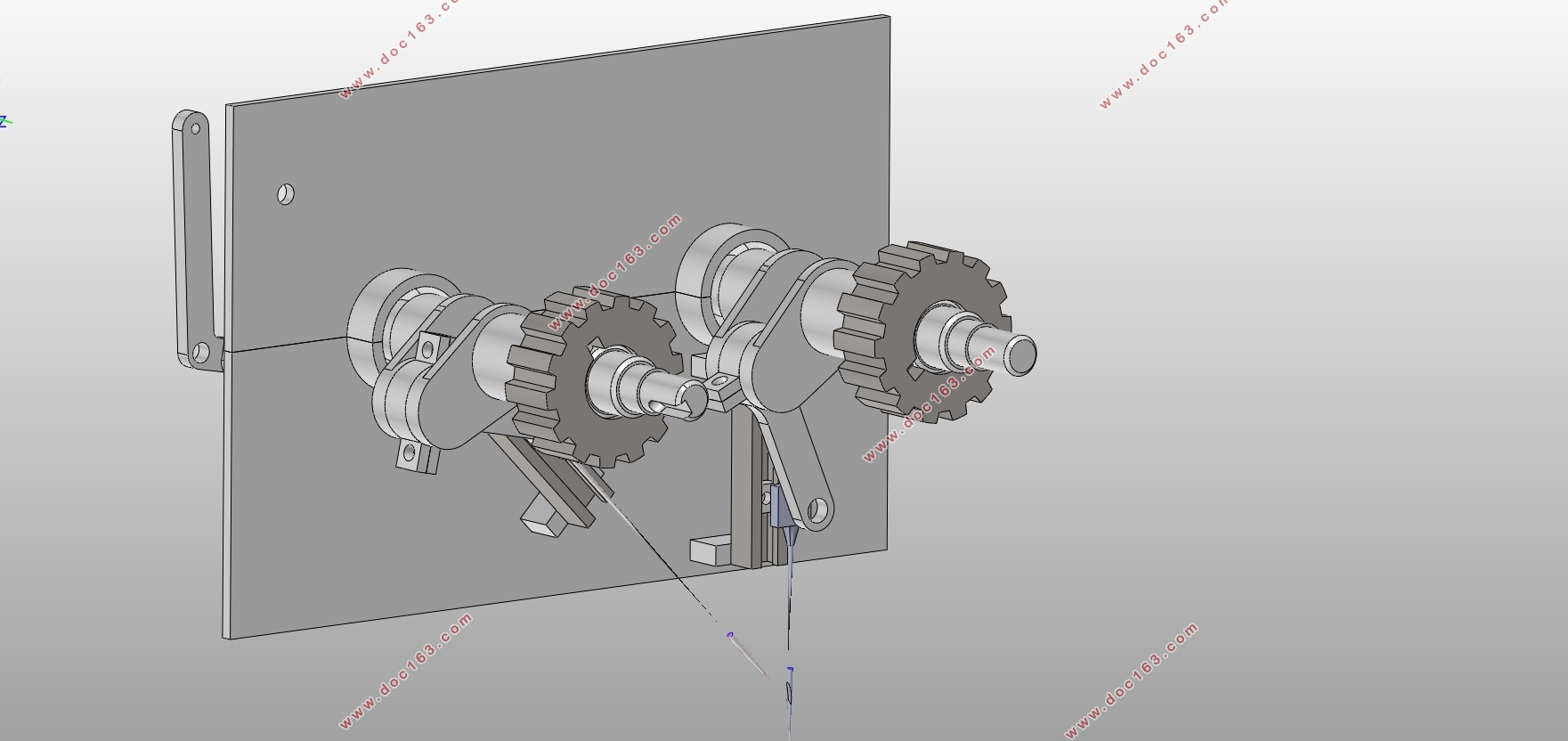
(3)设计了缝合设备的结构,包括挑线、引线和勾线机构。对其具体尺寸进行了设计与校核,分析挑线、勾线和引线三个机构的运动。在绘图软件SW中对其建模与运动仿真。
(4)介绍工业机器人系统,并选用五自由度机械臂,对每个关节的角度进行了设置,驱动系统选用了交流伺服电机驱动。
(5)介绍了齐次坐标变换和D-H参数法,并利用齐次坐标变换和D-H参数法对机械臂的运动进行分析,求解机械臂运动过程中的正问题和逆问题。
[资料来源:http://think58.com]
关键词:碳纤维;三维针织;机械手;单边缝合
Design of Three - dimensional Knitting Robot for Carbon Fiber
Abstract
Composite materials have been widely used in different industries of life. In the last century it has been deeply used in the aerospace, military and other fields. How to quickly and efficiently stitch the composite parts is a great challenge to improve the application of carbon fiber materials. In this paper I decided to choose the design which can be equipped with industrial robots as a general equipment. This kind of equipment can stitch the three-dimensional complex carbon fiber material parts automatically.In this paper, I did these jobs:
(1)Analysisthe application status of carbon fiber materials around the world. The wide application of carbon fiber materials and the demand of 3D knitting for complex parts are clarified.
(2)The characteristics of bilateral knitting technology and unilateral knitting technology are analyzed. Then select the design of double needle unilateral suture technique to design the equipment.
(3)I designed the structure of the stitching device, including the thread taking-up, leading and threading devices.I designed and check the specific size of the design. And I analysis the three institutions of movement. Then I built the model and simulated the motion in Solidworks.
(4)I introduced the industrial robot system, and chose the five-degree-of-freedom manipulator to carry the stitching machine. Set the angle of each joint. The drive system used the AC servo motor drive.
(5)I introduced the homogeneous coordinate transformation and the D-H parameter method. Then I used them to analysis the motion of the manipulator and to solve the positive problem and inverse problem in the process of manipulator movement.
Keyword:Carbon-Fiber;Three - dimensional Knitting; Robot; Oss
[资料来源:http://THINK58.com]
目录
第1章绪论 1 [资料来源:www.THINK58.com]
1.1 课题研究目的及意义 1
1.2 碳纤维复合材料制造及应用的现状与发展 2
1.3 工业机器人的发展与应用 2
1.4 碳纤维纺织缝合机器人的发展与应用 3
1.5 本文主要研究内容 4
1.6 本章小结 4
第2章双面及单面缝合技术的原理及应用 5
2.1 双边缝合技术原理 5
2.2 单边缝合技术原理 5
2.2.1 单针单线缝合技术 5
2.2.2 双针单线缝合技术 6
2.3 本章小结 8
第3章机械手末端缝合设备结构设计 9
3.1 末端缝合设备结构组成及传动方案 9
3.1.1缝合设备机构组成 9
3.1.2 缝合设备传动方案 9
3.2 引线、勾线机构设计 10
3.2.1 引线、勾线机构选型比较 10
3.2.2 引线、勾线机构尺寸设计 12
3.2.3 曲轴力学分析 14
3.3 挑线机构设计 16
3.3.1 挑线机构选型比较 16
3.3.2 挑线机构尺寸设计 17
3.4 各机构之间配合及相位关系 20
3.5 本章小结 22
第4章机械臂结构设计与受力分析 22
4.1 机械臂结构设计要求 22
4.2 机械臂传动方案总体设计 22
4.2.1 机械臂自由度 23
4.2.2 机械臂各部分机构及功能 24
4.2.3 机械臂的驱动方式 25
4.3 机械臂设计 25
4.4 机械臂关节转角控制 26
4.5 本章小结 27
第5章机械手运动学分析 28
5.1 机械臂运动学分析基础 28
5.2 机械臂位置姿态的确定 28
5.2.1 刚体位置和方向的描述 28
5.2.2 齐次坐标 29
5.3 机械臂运动学正问题求解 31
5.3.1 机械臂坐标系与连杆参数 31
5.3.2 D-H参数法 31
5.4 机械臂运动学逆问题求解 34
5.5 本章小结 34
第6章总结 35
参考文献 36
致谢 38
[来源:http://think58.com]