
�����ɶ�����Һѹ���˻�е���˶�������Һѹ��������ϵͳ���(��CADͼ)

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.���Ͻ���ѧϰ�ο�֮��.
�� �� ��
�����ɶ�����Һѹ���˻�е���˶�������Һѹ��������ϵͳ���(��CADͼ)(������,���ⱨ��,����˵����27000��,CADͼ2��)
ժҪ
���Ž������ҹ�������ʩ���ķ��ٽ��У������ɶ����ػ�е��Ӧ�˶�����������������·������ʩ��ά�������Ų�����������ã����ػ�е�����ҹ���Ӧ��Խ��Խ�㷺�����ͬʱ������ҵ�ķ�չ�Լ�Һѹ�����IJ��Ͻ���������һ���ؼӿ������ػ�е�۵ķ�չ��
�����������ӹ̼���Ϊ�о������������һ�ֶ����ɶ����ذ��˻�е�ۡ�ͨ���Ի�е�۲��������Լ���������������о������ݻ�е����ҵҪ������˶����ذ��˻�е�۵����巽����ơ����ݰ����Ի�е�۰������̵���ƣ����ɶȵ���ƣ��������������Լ����˶�����������ƹ�������ҪӦ������ά��ģ��������������Ʒ�����������ѧ�������������漼��������ͨ��Solidworks��ά��ģ�����Ի�е�۽����˻����Ľṹ��ƣ�����ͨ����������Ʒ�������Adams��������ƹ��ܶԻ�е���������������˵������棬�õ���е�۵����Ų����������õ���е�۸����˼��IJ������ڵõ���е�۵����Ų���������������˶�ѧ�����Լ����˶����������˶������õ����˶�ѧ���̣����˶�����ʵ���˶Ի�е�۵��˶��켣�滮�Լ����˶��еĹؽڽDZ仯��������ͨ��Adams�Ķ������漼������֤�����˶�ѧ�����Ľ��ۣ�ͬʱ��������˸����飬����˶Ի�е�۵��˶��켣���������õ��˻�е���ڹ��������и���Ҫ����Ԫ����������仯ͼ�� [������Դ��THINK58.com]
�ؼ��ʣ����ػ�е�ۣ�Һѹ������ʩ�����˶���������������
Summary
With the rapid development of construction and construction in China in recent years, multi-degree-of-freedom heavy-duty manipulators emerged as the times require. They have an irreplaceable role in the construction and maintenance of bridges, roads and tunnels. The application of heavy-duty manipulators in China is coming. The more extensive. At the same time, the development of the manufacturing industry and the continuous advancement of hydraulic technology have further accelerated the development of heavy-duty robotic arms.
Based on the research of tunnel reinforcement technology, this paper designs a multi-degree-of-freedom heavy-duty handling robot arm. Through the in-depth study of the operating environment of the robot arm and the operation object, the overall design of the heavy-duty handling robot arm was completed according to the requirements of the robot arm operation. The content includes the design of the robotic arm handling process, the design of the degree of freedom, the design of the overall mechanism and its motion analysis. In the design process, three-dimensional modeling technology, parametric design method, robotics method and dynamic simulation technology are mainly applied. Firstly, the basic structure design of the manipulator is carried out by Solidworks 3D modeling technology. Then the parametric design method, namely the Adams parametric design function, is used to simulate the virtual prototype of the manipulator, and the optimal parameters of the manipulator are obtained. The parameters of each arm of the robot arm. After obtaining the optimal parameters of the manipulator, positive kinematics analysis and inverse kinematic analysis were performed. The forward motion analysis obtains its kinematics equation, and the inverse motion analysis realizes the trajectory planning of the manipulator and the amount of joint angle change in its motion. Finally, the conclusions of the inverse kinematics analysis were verified by Adams's dynamic simulation technology. At the same time, the interference check was performed, and the trajectory correction of the mechanical arm was completed, and the main driving components required by the mechanical arm during the working process were obtained. The force change diagram. [������Դ��http://THINK58.com]
Key words: heavy-duty manipulator; hydraulic; tunnel construction; motion analysis; dynamic simulation
2.1��е�۲����������������о�
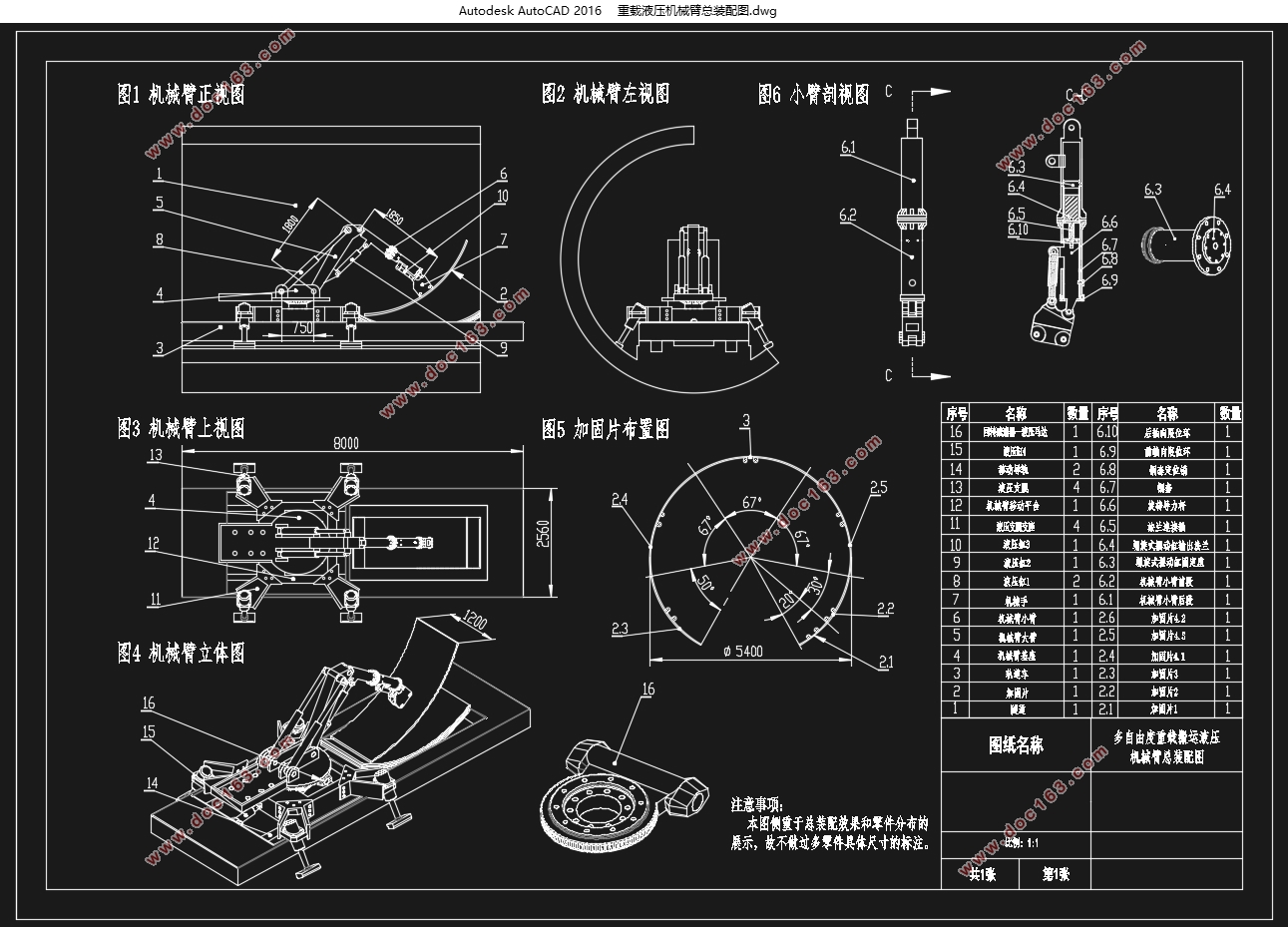
2.1.1 ���������ߴ����
���������ߴ���ͼ��ʾ��
�����ھ�D=5400mm��������Ҹ�S=800mm�������ƽ̨�߶�H=1000mm
2.1.2 ��������ߴ����
�ӹ̰�һ��4�����ͣ��ֱ�1/2/3/4��������
�������ԣ�
���ϣ�������
�����ߴ磺�����ΪB=1200�L�����K=32�L�������뾶R=2700�L
[��Դ��http://www.think58.com]
Ŀ¼
��1������ 6
1.1 ����������������� 6
1.2 �������е���о���״ 7
1.2.1�����е���о���״ 7
1.2.2���ڻ�е���о���״ 7 [��Դ��http://think58.com]
1.3 �����о�����Ҫ���� 8
��2�»�е�����巽����� 9
2.1��е�۲����������������о� 9
2.1.1 ���������ߴ���� 9
2.1.2 ��������ߴ���� 9
2.1.3��е�۹��������������������Է��� 10
2.2 ��е�۹������̷��� 11
2.2.1��е����ҵ������� 11
2.2.2 ��е�۰��˴������� 12
2.3��е��������������뽨�� 13
2.3.1��е�����ɶȵķ����뽨�� 13
2.4��е��������ʽѡ�� 16
2.5��е�ۿ��Ʒ�ʽѡ�� 16
2.6 ������ 16
��3�»�е�۽ṹ��� 17
3.1��е�ֽṹ��� 17
3.1.1��е�ֽṹ��Ƶ��������� 17
3.1.1��е�ֽṹ��ƾ��巽�� 17
3.2�����ṹ��� 19
3.2.1�����ṹ��Ƶ��������� 19
3.2.2�����ṹ��Ƶľ��巽�� 20
3.3 ��е�۴�ۺ�С����� 22
3.3.1��е�۴�ۺ�С����Ƶ��������� 22
3.3.2��е�۴�ۺ�С�۷������ 22
3.4 ��е������֧����� 25
3.4.1��е������֧����Ƶ��������� 25
3.4.2��е������Һѹ֧�ȷ������ 26
3.5 ������ 26
��4�»���Adams�Ļ�е�����Ż� 28
4.1��е�����Ż����� 28
4.2 ��е�����Ż�Ŀ�� 28
4.2.1�����Ż����������� 28
4.3 ��е�����Ż�Ŀ�� 30
4.3.1�����Ż����������� 30
4.3.2Ϊ����ʩ��Լ���������������� 31
4.3.3����������������� 32
4.3.4��Ʊ�����ֵ���� 35
4.4 ����������������ȷ����֤ 36
4.3.4��֤��Ŀ�ĺͷ��� 36
[��Դ��http://think58.com]
4.3.4��֤�ľ������ 36
4.4 �;��ȵ������� 37
4.4.1�;��ȵ��������Ŀ�� 37
4.4.2�;��ȵ����������ʵʩ���� 37
4.5 �߾��ȵ������� 43
4.6 ������ 44
��5�»�е�����˶����� 45
5.1 �������D-H���� 45
5.1.1������е������ϵ 45
5.1.2����D_H���� 46
5.2 ����е���˶�ѧ���� 46
5.2.1������е���˶�ѧ���� 46
5.2.2����е�۵��������任���� 47
5.3 ������ 49
��6�»�е�����˶����� 50
6.1 ��е��ִ��ĩ���˶��켣�滮 50
6.1.1��ȡ�ӹ�Ƭ�����˶��켣�滮 50
6.1.2���ζ�λ�ӹ�Ƭ�����˶��켣�滮 51
6.1.3��ɶ�λ�ӹ�Ƭ�����˶��켣�滮 53
6.2 ��е�����˶�������� 57 [��Ȩ���У�http://think58.com]
6.2.1��ȡ�ӹ�Ƭ���̸����ؽڽDZ������ 57
6.2.2���ζ�λ�ӹ�Ƭ���̸����ؽڽDZ������ 58
6.2.3��ɶ�λ�ӹ�Ƭ���̸����ؽڽDZ������ 58
6.2.4��Һѹ���������ȼ��� 59
6.3 ������ 62
��7�»���Adams�Ļ�е�۶������� 63
7.1�������Adams�������� 63
7.1.1������������ 63
7.1.2�Թ����������� 63
7.1.2�Թ�������Լ�������� 64
7.1.3��������Һѹ�������˶��������� 65
7.2��е�۸����鼰�˶��켣���� 68
7.2.1��е�۸����� 68
7.2.2��е���˶��켣���� 69
7.2.3ִ��ĩ���˶��켣ͼ 72
7.3 �����˶�ѧ�������������֤ 73
7.4 �ؼ�Һѹ�������仯ͼ 74
7.4 ������ 76
��л 77
[������Դ��www.THINK58.com]
����� 79
����1��е��װ����ͼ……………………………………………………………. 80
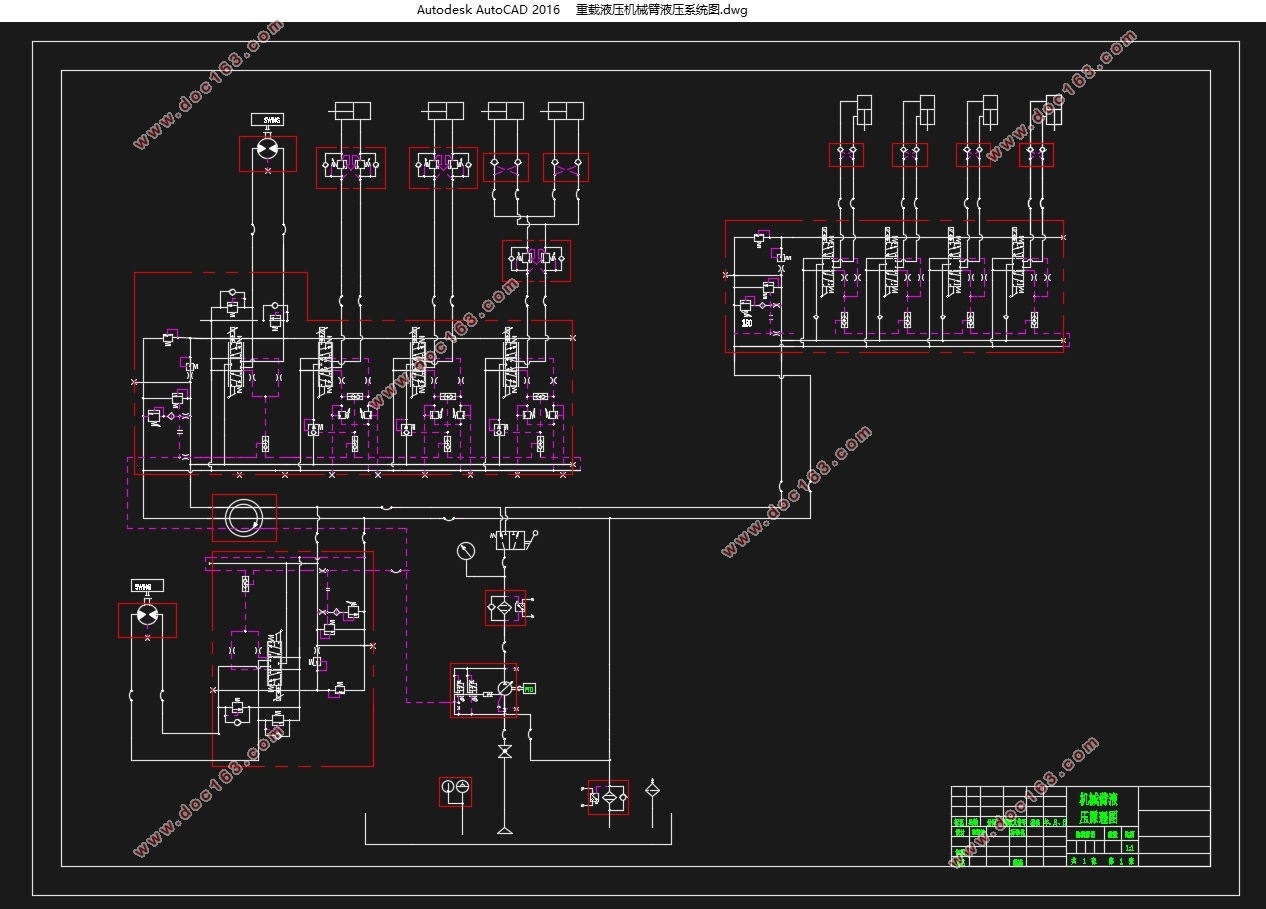
����2��е��Һѹϵͳͼ……………………………………….………………. 81
[������Դ��http://think58.com]
��һƪ��С�͵綯������װ���ۼ�ϵͳ���(��CADͼ,PROE��άͼ,���涯��)
��һƪ��1250��/Сʱ��ʽץ��ж�������μ����(��CADͼ)