
拾取并联机器人结构设计(含CAD零件图装配图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
拾取并联机器人结构设计(含CAD零件图装配图)(任务书,开题报告,论文说明书12000字,CAD图3张)
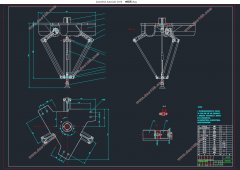
并联拾取机器人主要由主动臂、从动臂、静平台、动平台、伺服电机、减速器、PLC等部件通过一些连接部件装配而成。其中主动臂和伺服电机是通过法兰来连接的,而主动臂和从动臂、从动臂和静平台都是通过球铰链连接的。
本文设计的高速拾取机器人具有具有刚度大,承载能力强,精度高,末端件惯性小等优点。适用多种行业,特别是食品、医药、电子装配行业等。
关键词:并联机构拾取机器人伺服电机结构设计
设计的基本内容
设计的要求
设计任务书上要求我所设计的机器人的工作空间直径:500mm,工作空间高度:80mm,拾取物体质量为1kg。根据上述要求结合我所查阅的资料,我初步选定机器人的机构原型为Delta机构。工作空间的范围大小是跟主动臂、从动臂的长度相关的,而拾取物体的质量大小是由电机的类型、功率、转矩、和转动惯量所决定的。
功能的实现方法
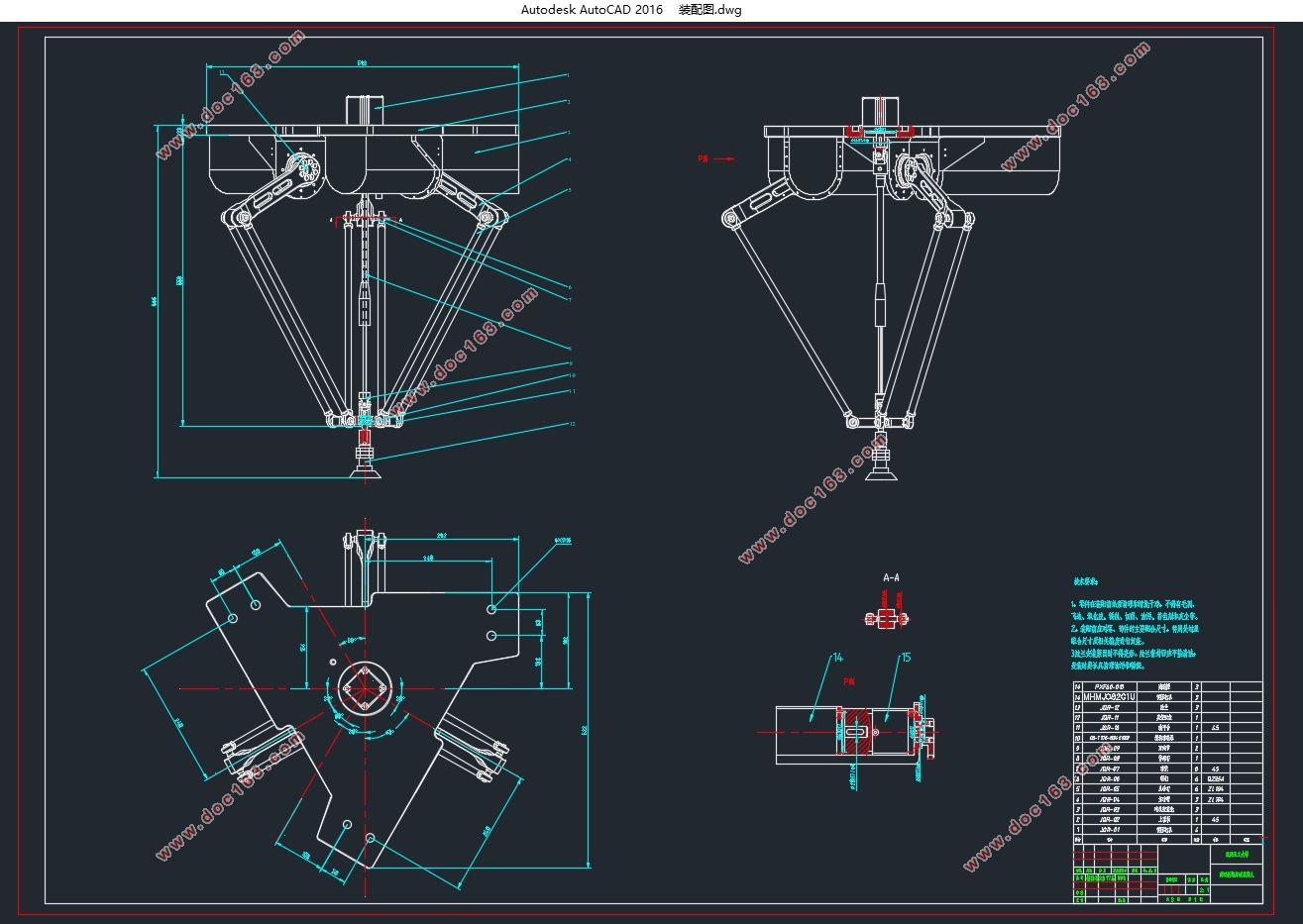
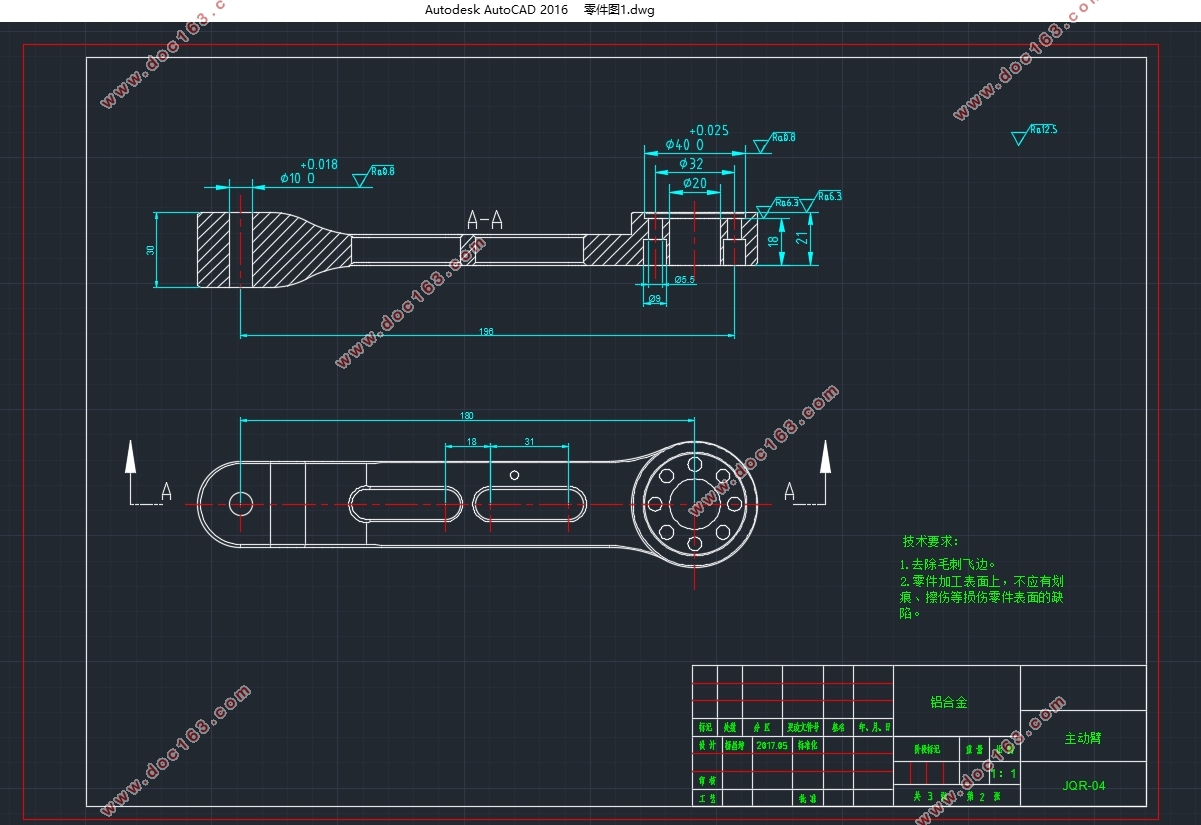
我所设计的机器人为高速的拾取并联机器人,要想实现高速拾取功能,首先机器人的整体质量不能太重,这就要求所设计的机器人的结构不能太复杂,于是我决定在Delta机构的基础上加以改进完善。Delta机构主要由动平台、主动臂、从动臂、中间旋转轴、静平台、驱动电机和一些连接部件组成,动平台与主流的设计一样,设计成120°对称的结构,上面分别对称布置3个驱动电机并设计安装和定位的元件,需要注意的是静平台不能阻碍主动臂的运动。所以3个电机的布置尤为重要。关于主动臂我想设计成前大后小的的杆件,为了减轻质量,中间挖去两个槽,前端大的部分与电机相连,连接方式我选择拆卸方便、强度高、密封性能好的法兰连接。从动臂的话只要能传递运动即可,设计尽量简单,我想设计成对称的圆柱形。对于静平台,它的设计应与动平台相呼应,静平台上只需要安装3对从动臂和一个执行元件,考虑质量问题,所以设计也不能复杂,我想就设计成人字形的结构。而中间的旋转轴是用来连接电机和执行元件实现Z轴的转动,但又要跟随动平台X、Y轴的平动,所以它们的连接我采用球铰连接。中间的连接轴设计成伸缩杆,这样就能实现空间的拾取了。想要实现高速拾取功能还有很重要的一点就是:电机的选型,经过对比分析,我决定使用交流伺服电机。
[资料来源:www.THINK58.com]
总体方案
本文所设计的机器人整体呈120°对称,主要组成部件有:静平台、动平台、主动臂、从动臂、伺服电机和万向节等。伺服电机和减速器安装在静平台上,静平台固定于吊顶,主动臂通过法兰与减速器相连接,从动臂通过球铰链与主动臂和动平台相连接,万向节上端与伺服电机相连,下端通过轴承连接吸盘实现旋转自由度。参照Delta机器人、Par4机器人和Diamond机器人的性能参数,我对出本设计所研究高速拾取并联机器人的设计性能参数进行了分析和计算得出参数如下所示,这些性能指标参数是根据现有产品的参数值再结合任务书给定的要求综合考虑所设计的。我所设计的机器人具有4个自由度分别为沿x、y、z方向的平动自由度和绕z轴的旋转自由度。工作空间的尺寸表示机器人末端吸盘可以达到一个直径为500mm、高度80mm的工作空间。
机器人的整体参数
表格2 1 机器人整体参数
机构名称 高速拾取机器人 额定电压 200V
控制轴数 4 额定功率 750W
额定负载 1kg 本体质量 85kg
最大负载 3kg 安装方式 吊顶安装
最大速度 5m/s 结构 并联
最大加速度 50m/s² 驱动方式 AC伺服电机
[资料来源:http://www.THINK58.com]

目录
第1章 绪论 1
1.1 目的与意义 1
1.2 高速拾取并联机器人的研究现状 1
1.3 本次毕业设计的内容 3
第2章 设计的基本内容 5
2.1 设计的要求 5
2.2 功能的实现方法 5
2.3 总体方案 5
2.4 机器人的整体参数 6
第3章 主要零部件的设计 7
3.1 主、从动臂长度的确定 7
3.2 静平台的设计 8
3.3 主动臂的设计 9
3.4 从动臂的设计 9
3.5 动平台的设计 10
3.6 旋转轴的设计 10
3.7 本章小结 10
第4章 元件的选型 11
4.1 轴承的选取 11
4.2 电机的选取 12
4.3 减速器的选取 15
4.4 机械手的选取 16
第5章 总结 18
5.1 产品特色 18
5.2 设计心得 18
致谢 20
[资料来源:THINK58.com]