
水下抓斗液压驱动系统设计(含CAD图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
水下抓斗液压驱动系统设计(含CAD图)(任务书,开题报告,论文说明书14000字,CAD图5张)
摘要
水下电液抓斗是一种广泛应用于航道疏浚和大型海洋工程建设的水下挖泥装置。近几年来,跨海大桥、沿海港口建设等大型海洋工程建设都在高速发展。因此对水下电液抓斗的液压系统的研究将极大促进疏浚业的发展,从而促进国内经济的发展。本文设计的是斗容为200m³的电液抓斗的样机的液压系统。设计中,全部采用插装阀回路,并采用恒功率变量泵,能很好地满足工况需求,并能很好地反映实物的性能。
关键词:水下抓斗;疏浚;液压系统;插装阀
Abstract
Hydraulic dredging grab is widely used in dredging and marine construction projects. In recent years, Bridge, coastal port construction and other large marine constructions are developed in the high speed. Therefore, the study of hydraulic system of hydraulic grabs, will greatly promote the development of the dredging industry, so as to promote the development of economic. This design is a hydraulic system of a prototype of a hydraulic dredging grabs that has a bucket capacity of 200m³ .The system uses cartridge valve circuit and constant power variable pump. This design can satisfy the needs of working conditions and reflect the performance of the prototype.
Key Words: Underwater Grab; dredge; hydraulic system ;cartridge valves
液压系统的功能原理的设计
2.1明确技术要求
在进行液压系统的设计时,首先要明确主机的技术要求,因为主机的技术要求是设计液压系统的依据。主机的技术要求包括主机的动作要求、主机的性能要求、主机的使用条件和工作环境等。
2.1.1主机的动作要求
主机的动作要求指的是主机的哪些动作是需要液压传动系统来完成的,主机的执行元件采用何种类型以及各个执行元件之间的动作顺序等。
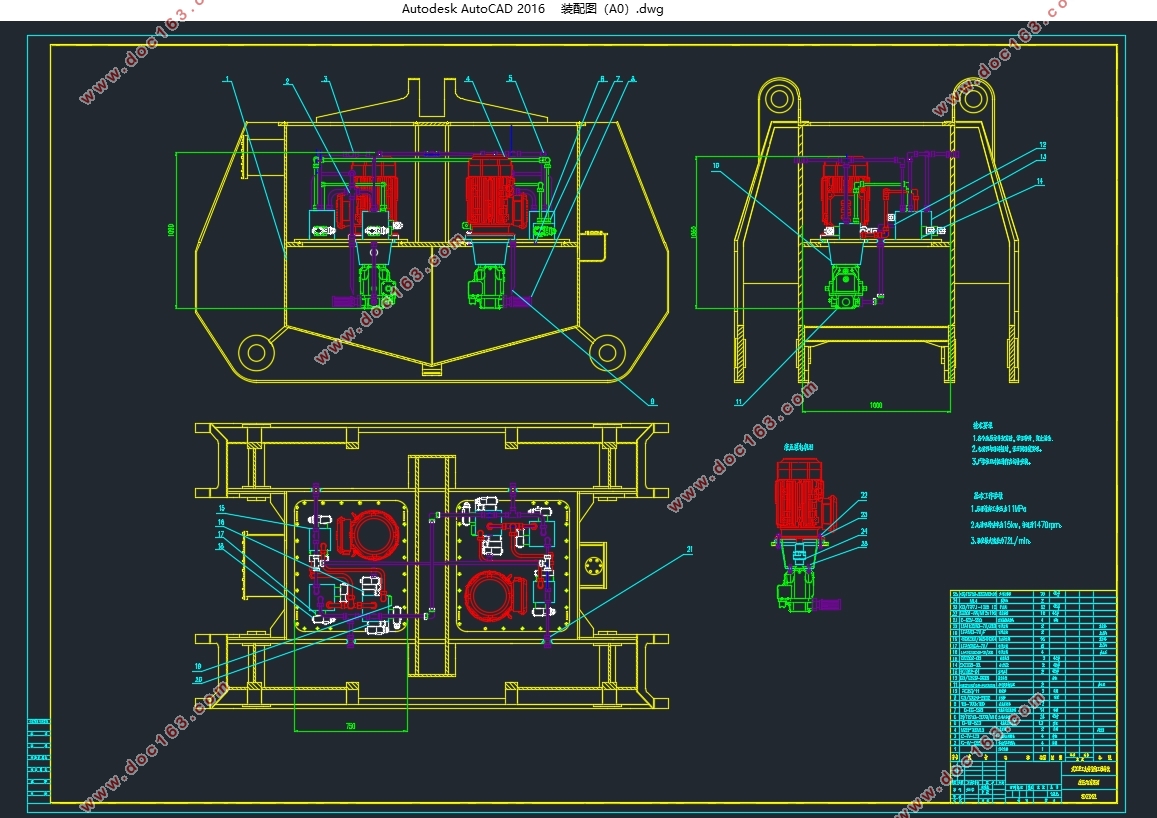
在本次设计中,主机为水下抓斗,水下抓斗的张开以及关闭动作是需要液压传动系统来实现的。采用两个单杆活塞缸作为执行元件,液压缸活塞杆的伸出动作完成主机的闭斗动作,液压缸活塞杆的缩回动作完成主机的开斗动作。此外,两个液压缸之间的动作应该同步。
2.1.2主机的性能要求
主机的性能要求指的是主机对采用液压传动系统的各个执行机构在力和速度方面的要求。各个采用液压传动系统的执行机构在各个工作阶段所需的力和速度的大小、运动的平稳性等方面都要有明确的要求。
在本次设计中,抓斗在进行正常工作即进行闭斗抓取物体时,所受的负载为变值负载。抓斗在进行闭斗动作时,在碰到物体之前需要进行快速闭斗动作即液压缸的伸出动作速度要快,碰到物体以后动作速度要减慢。
2.1.3主机的使用条件以及工作环境
本次设计的主机为疏浚用的水下电液抓斗,所以主机的工作环境在水下。虽然本次设计的只是一个样机的液压驱动系统,但是为了反映实物的性能以及设计特点,在设计时必须考虑其在水下工作时需要注意的地方。
2.2工况分析
工况一:抓斗在处于张开状态但未工作之前要防止其因抓斗自重而自动闭合。
工况二:抓斗开始闭斗动作时,在抓斗自身载荷的作用下快速闭斗切入物料。
工况三:在切入物料时,切入速度要减慢,并且遇到坚硬物料时,液压推力增大。抓斗闭合动作完成后,主油路上的二通插装阀的阀芯关闭,同时抓斗开始起升。
工况四:开斗时,首先克服斗间的摩擦力(此摩擦力大小未知,因为斗间的摩擦力不仅要考虑满斗重量,还要考虑斗间的泥沙堵塞导致开斗时需要的力很大)开斗,然后要克服抓斗自身重力作用继续开斗直到抓斗最开始的状态。
2.3确定液压系统的主要参数
[资料来源:THINK58.com]
液压系统中最主要的参数是压力和流量,它们是选择系统方案、液压元件、辅件和原动机规格的依据。液压系统的压力取决于外负载,流量取决于执行元件的结构尺寸和运动速度。要确定液压系统的这两个参数,首先选定执行元件的设计压力,然后根据最大外负载和选定的设计压力计算液压执行元件的主要结构尺寸,最后根据对液压执行元件的运动速度的要求就可以确定流量。
[资料来源:www.THINK58.com]

目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 水下电液抓斗的基本介绍 1
1.2 研究的目的和意义 2
1.3 水下电液抓斗的国内外研究现状 2
1.4 研究内容 3
第2章 液压系统的功能原理的设计 5
[资料来源:http://www.THINK58.com]
2.1 明确技术要求 5
2.1.1 主机的动作要求 5
2.1.2 主机的性能要求 5
2.1.3 主机的使用条件以及工作环境 5
2.2 工况分析 5
2.3 确定液压系统的主要参数 6
2.3.1 初选液压执行元件的设计压力 6
2.3.2 计算液压缸的主要结构尺寸 7
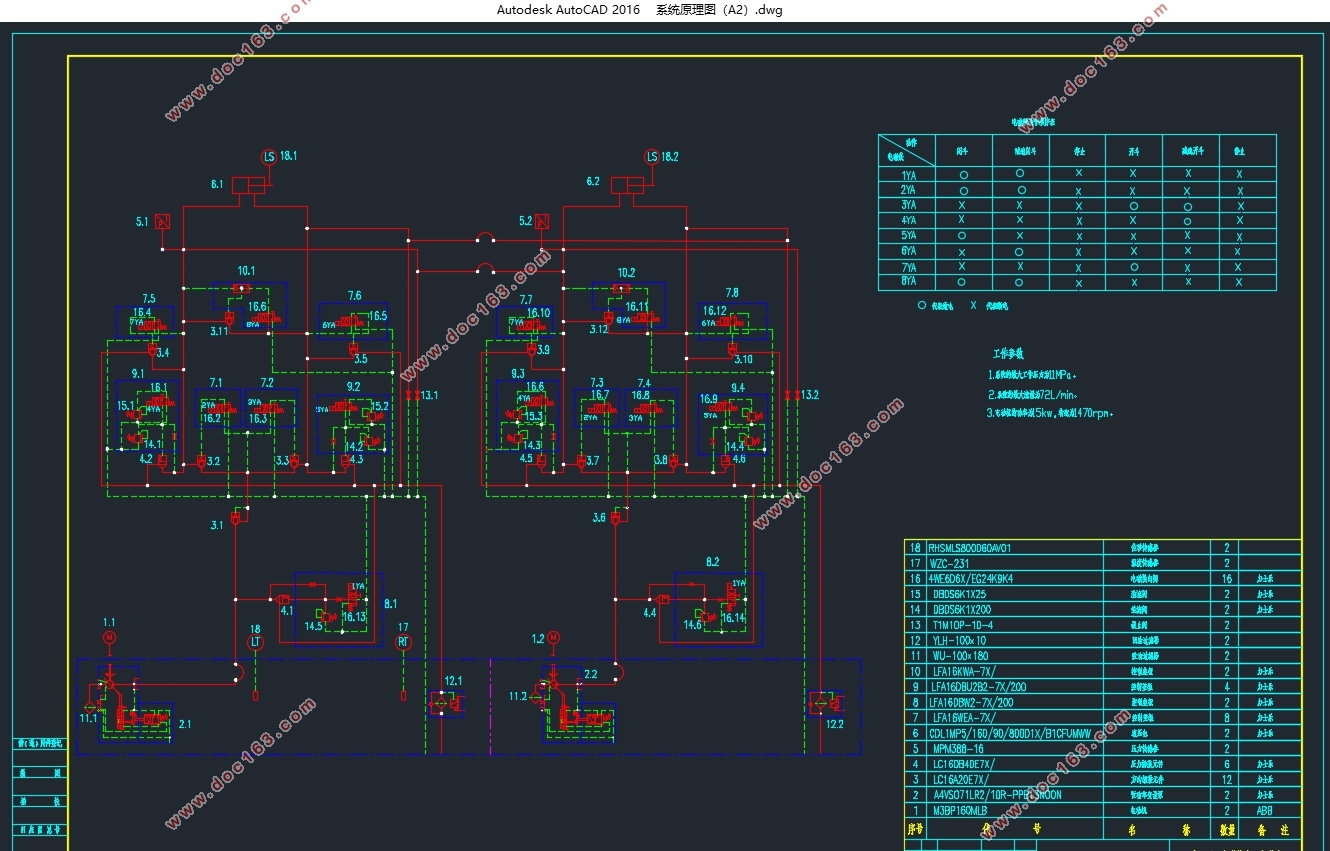
2.4 拟定液压系统原理图 9
2.4.1 液压系统类型的拟定 9
2.4.2 调速回路的拟定 10
2.4.3 方向控制回路的拟定 10
2.4.4 动力源方案的拟定 10
2.4.5 压力控制回路的拟定 11
2.4.6 根据实际工况拟定的其它回路 11
2.4.7 制定系统原理图 11
第3章 液压元件的计算和选型 15
3.1 液压缸的参数计算及选型 15
3.1.1 液压缸的参数计算 15
3.1.2 液压缸的选型 15 [资料来源:http://www.THINK58.com]
3.2 液压泵的参数计算及选型 15
3.2.1 液压泵的参数计算 15
3.2.2 液压泵的选型 16
3.3 电动机的参数计算及选型 17
3.4 联轴器的选型 17
3.5 二通插装阀的选型 17
3.5.1 主油路上作为安全阀的二通插装溢流阀的选型 17
3.5.2 液压缸无杆腔一侧的二通插装溢流阀的选择 18
3.5.3 液压缸有杆腔一侧的二通插装溢流阀的选择 19
3.5.4 主油路上起单向阀作用的二通插装方向阀的选择 20
3.5.5 控制进油方向的二通插装方向阀的选型 20
3.5.6 控制回油方向的二通插装方向阀的选型 20
3.5.7 差动回路的二通插装方向阀的选择 21
3.6 液压辅助元件的选型 21
3.6.1 过滤器的选型 21
3.6.2 温度仪表的选择 22
3.6.3 压力传感器的选择 22
3.6.4 液位传感器的选择 22 [版权所有:http://think58.com]
3.6.5 位移传感器的选择 22
3.6.6 液压元件明细表 22
3.7 液压系统的性能验算 23
3.7.1 回路压力的损失验算 23
3.7.2 液压系统的温升验算 23
第4章 液压装置的结构设计 25
4.1 液压装置的结构形式 25
4.2 油箱的设计 25
4.3 液压泵站类型及其组件配置形式的选择 25
4.4 阀集成块的设计 26
4.5 管路以及管路的布置 27
4.6 经济性分析 28
第5章 总结与展望 30
5.1 总结 30
5.2 展望 30
参考文献 31
致谢 32