
一种轮式隧道爬行器设计(含CAD零件图装配图,CATIA三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
一种轮式隧道爬行器设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,论文说明书15000字,CAD图9张,CATIA三维图)
摘要
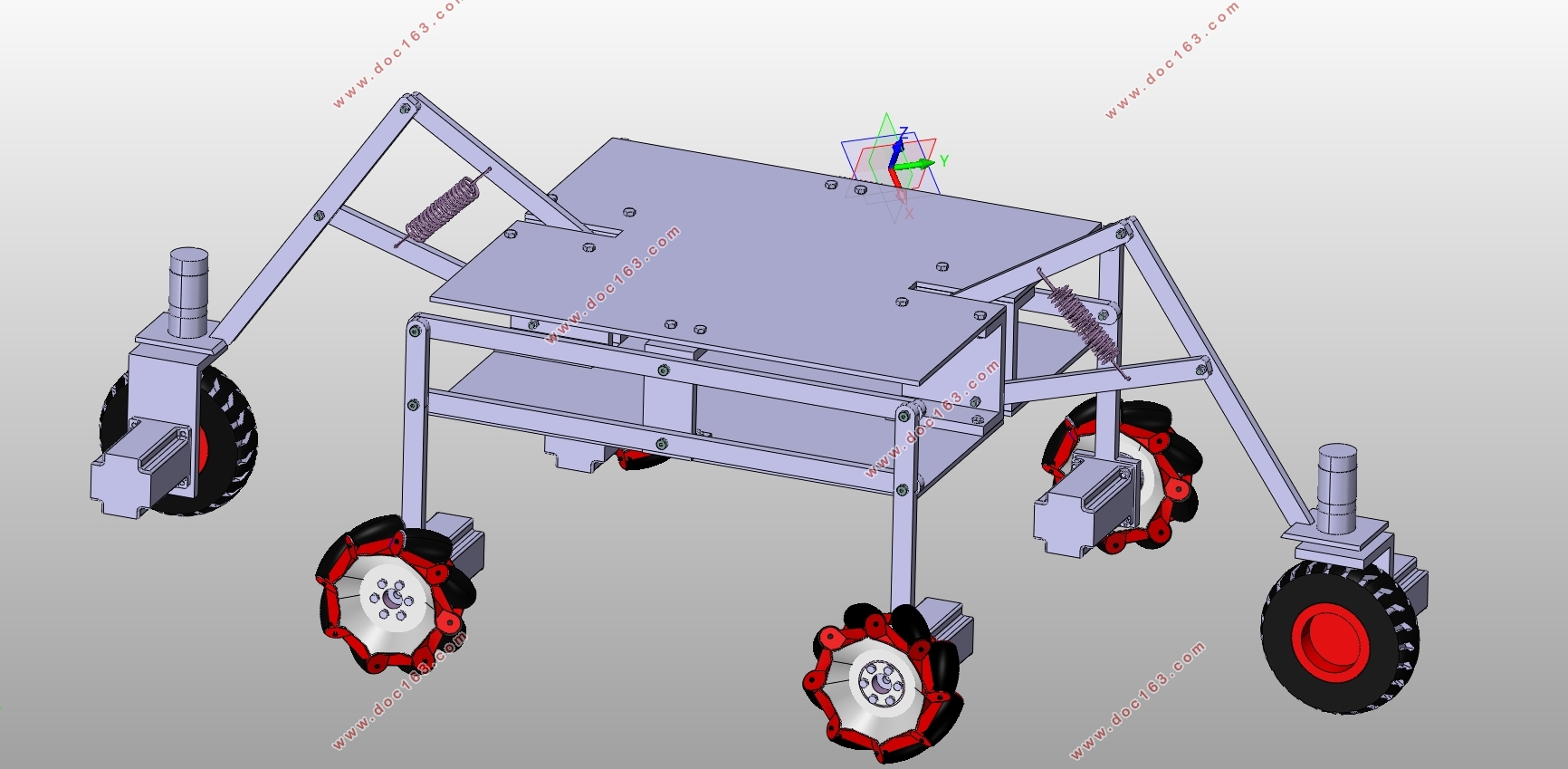
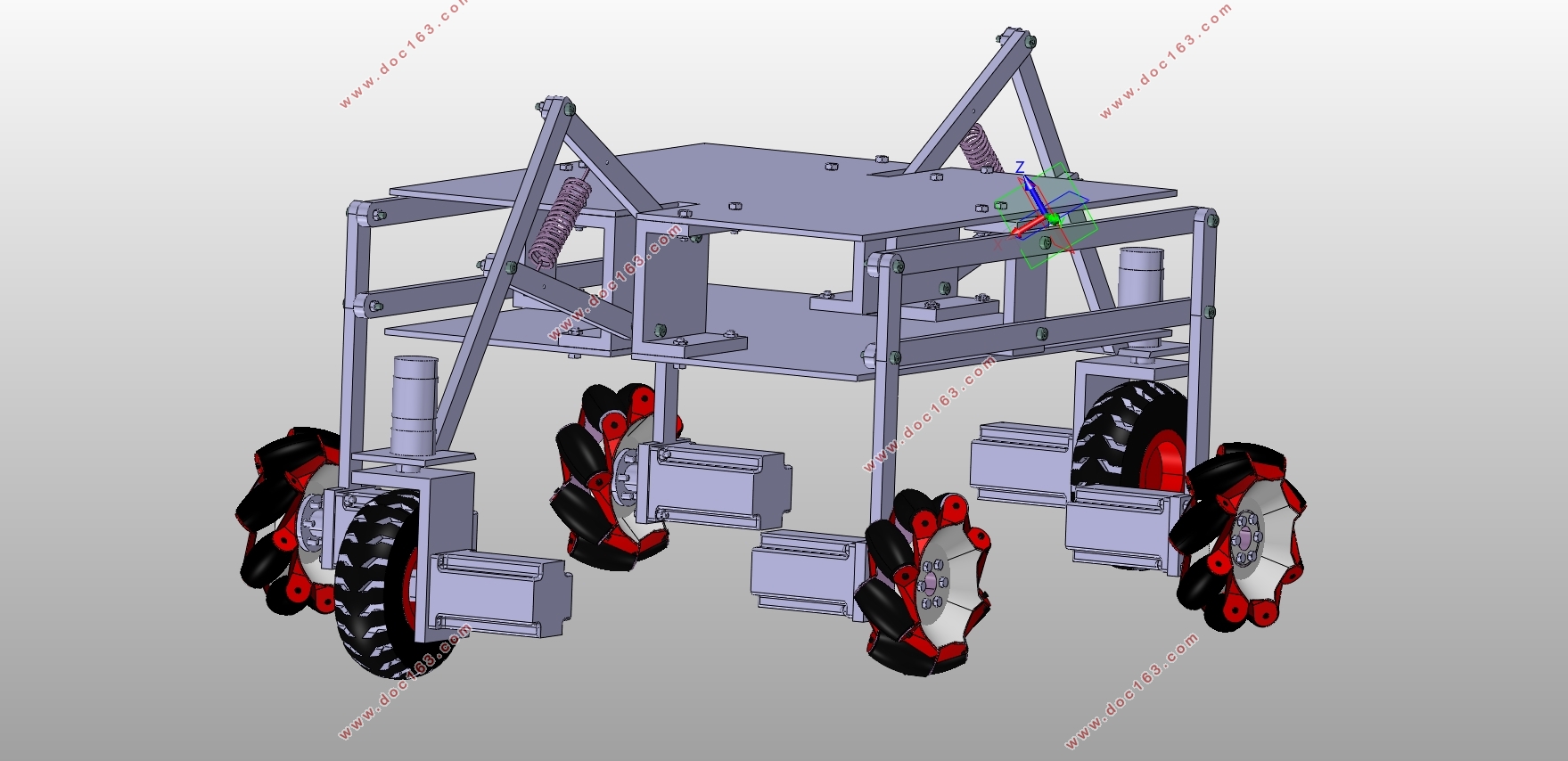
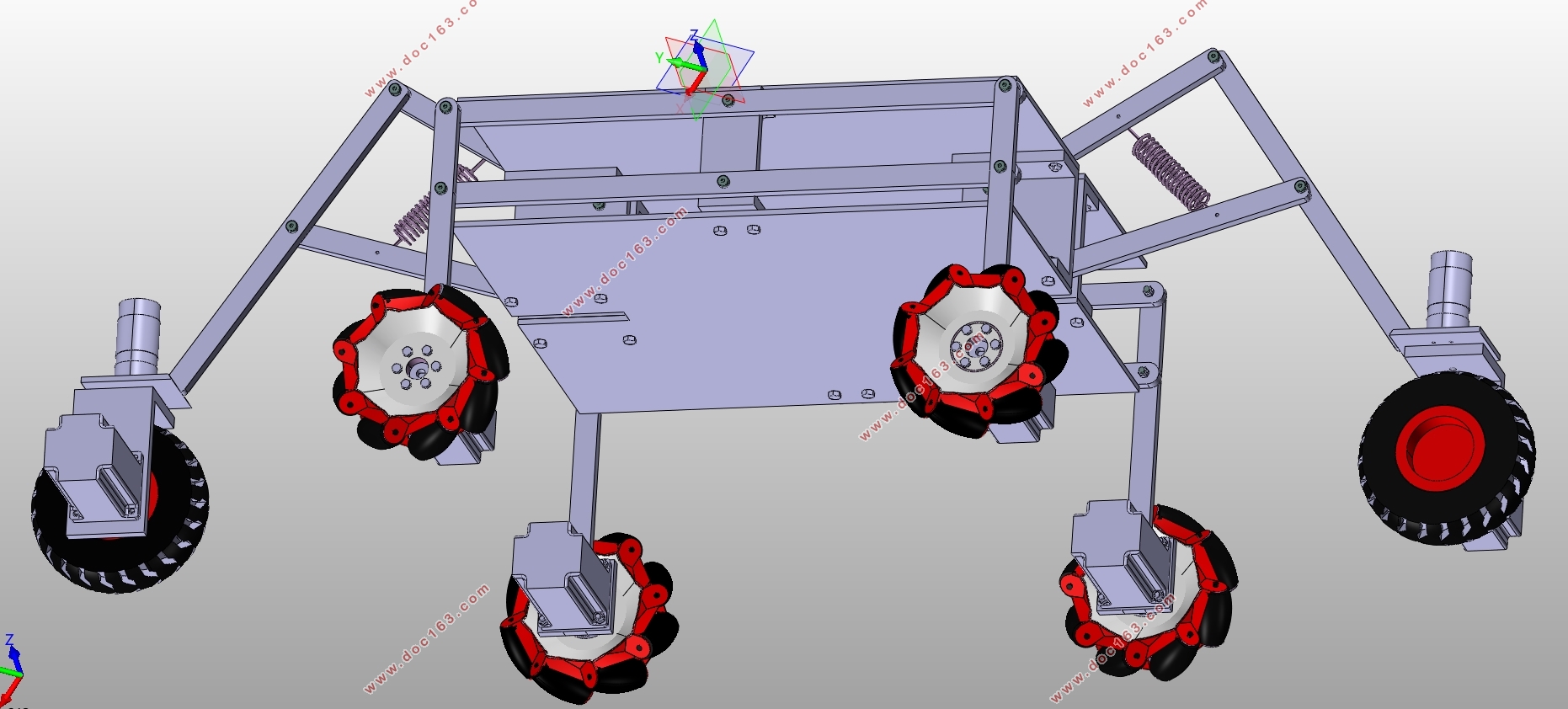
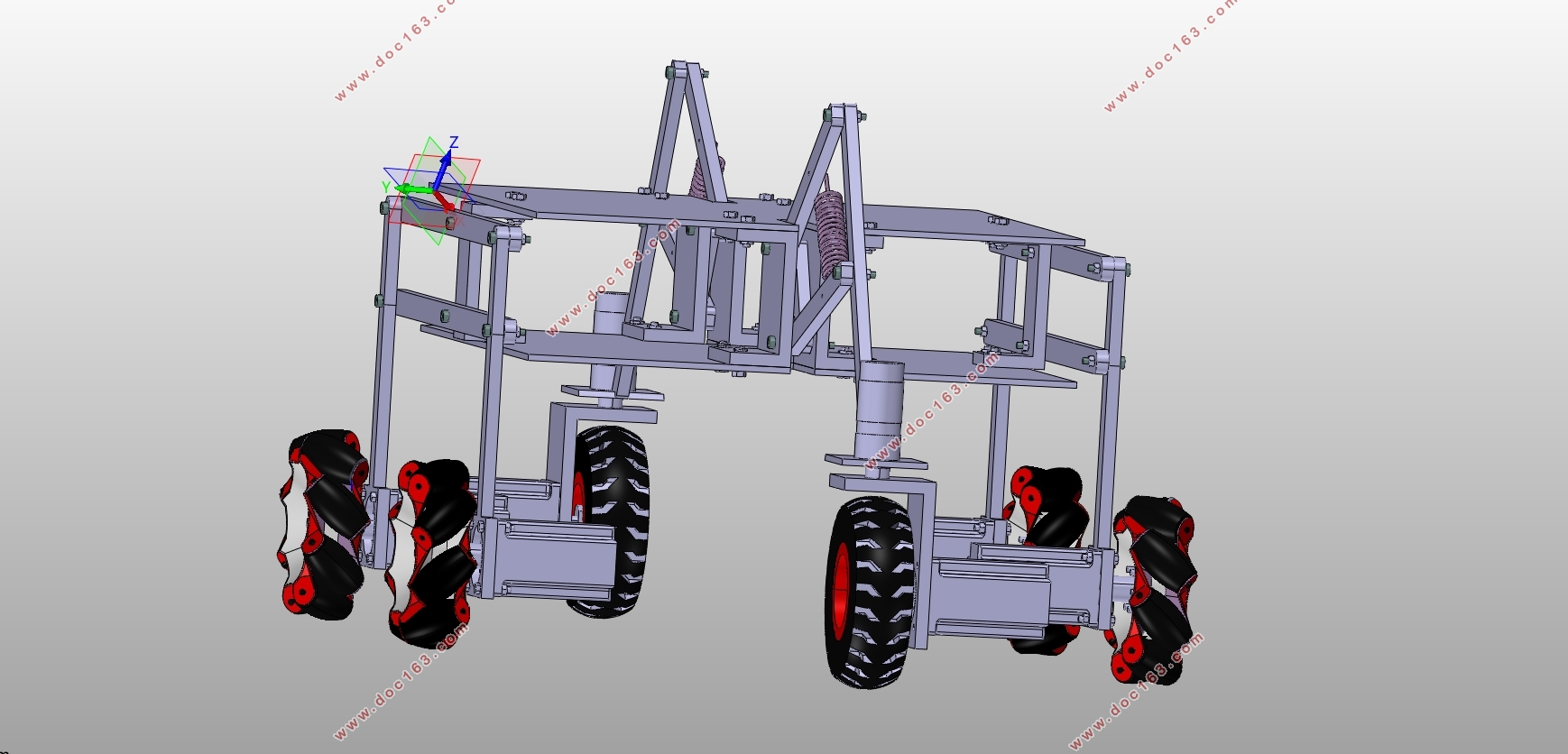
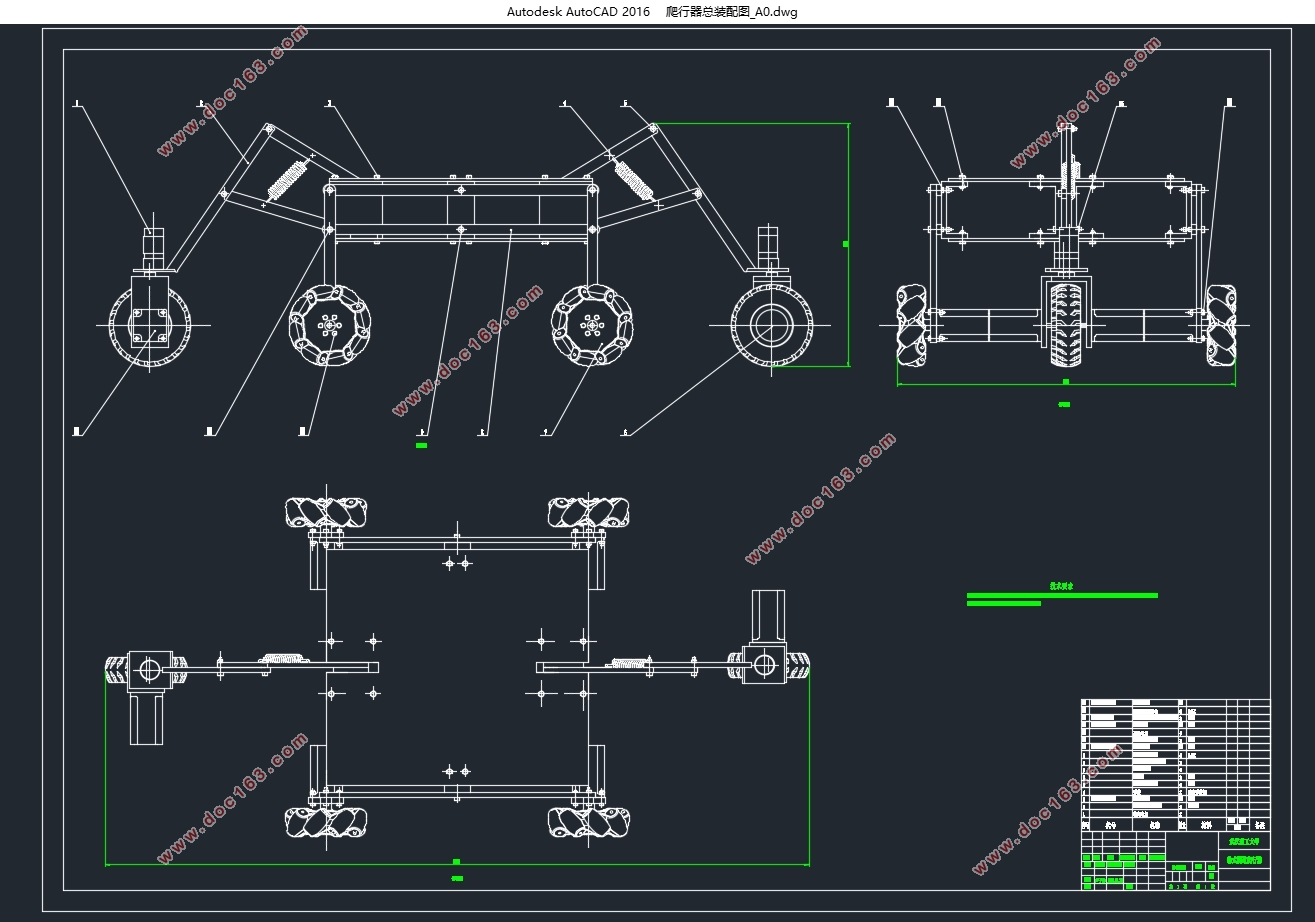
为了能够在隧道中安全便捷地探测渗漏水的位置,设计了一款能够被动越过1.5倍车轮直径高度障碍且具有三个自由度全方位移动的机器人。该机器人共计六个车轮,两侧采用两个Mecanum轮作为驱动轮,安装在四边形越障机构上。前后两端采用普通的橡胶轮作为越障轮,安装在双曲柄加弹簧的越障机构上。本文介绍了爬行器的组成和工作原理,计算并设计了曲柄连杆,电机等机构,同时运用CATIA软件及Adams软件完成了进行三维建模、虚拟装配和仿真模拟的工作,仿真结果表明该爬行器结构合理,可以完成三个自由度的运动且能够越过规定高度的障碍。最后使用Arduino板编写相关程序,完成了爬行器直行、横行、原地旋转的动作。
关键词:隧道爬行器;Mecanum轮;被动越障
Abstract
In order to detect the location of water leakage safely and conveniently in tunnels, a robot that can move across the obstacle whose the vertical height is 1.5 times wheel diameterand move with three degrees of freedom is designed. The robot has six wheels. The four wheels which are arranged on both sides are Mecanum wheels and the two wheels which are arranged on the front and back are rubber wheels. In this paper, the composition and working principle of the robot are introduced. Crank pitman mechanism, motor and other mechanism aredesigned. 3D modeling, virtual assembly and simulation areachievedbyusingCATIAandAdams. Theresultshowsthisrobotcan move with three degrees of freedom andhave the great ability to move across the obstacle. Finally, the robot is controlled by using Arduino development board downloadedthe control program. [来源:http://www.think58.com]
Key Words:Tunnel crawler;Mecanum wheel;Passive obstacle surmounting
2.1爬行器介绍
爬行器的设计包括机械结构的设计和运动程序的编程。机械部分主要由越障结构和驱动部分构成。
2.1.1爬行器车架介绍
车架起着承载爬行器机构和相关设备的作用。车架的材料应具有强度高,质量轻,易加工的特点。所以选择使用铝合金作为车架的材料。设计的形状为长方形,这样的设计可以使得爬行器更加可靠。
2.1.2爬行器双曲柄越障机构
爬行器双曲柄越障机构由平面双曲柄机构、减震弹簧、转向电机和导向前轮组成。当爬行器遇到障碍时,导向轮接触前方障碍,障碍给与导向轮的阻力使平面双曲柄机构产生被动的形变,从而使得曲柄杆被动地抬起,从而使得导向轮沿障碍的方向向上爬升并越过障碍[17]。曲柄之间的弹簧在越障的过程中,随着曲柄的抬起,弹簧不断收缩,起着蓄能减振的作用。而当爬行器越障结束,弹簧则释放储存的能量,使曲柄结构回到之前的状态
2.1.3爬行器侧部平行四边形越障机构
侧部平行四边形越障机构由平行四边形机构和两个Mecanum轮组成。当一边的轮与障碍物接触时,由于阻力的作用,四杆组成的平行四边形机构会产生相应的形变,由于形变的存在,爬行器在越障时,重心降低,能更好地适应不同的地形
[来源:http://www.think58.com]
[资料来源:http://www.THINK58.com]
 [资料来源:www.THINK58.com]
[资料来源:www.THINK58.com] 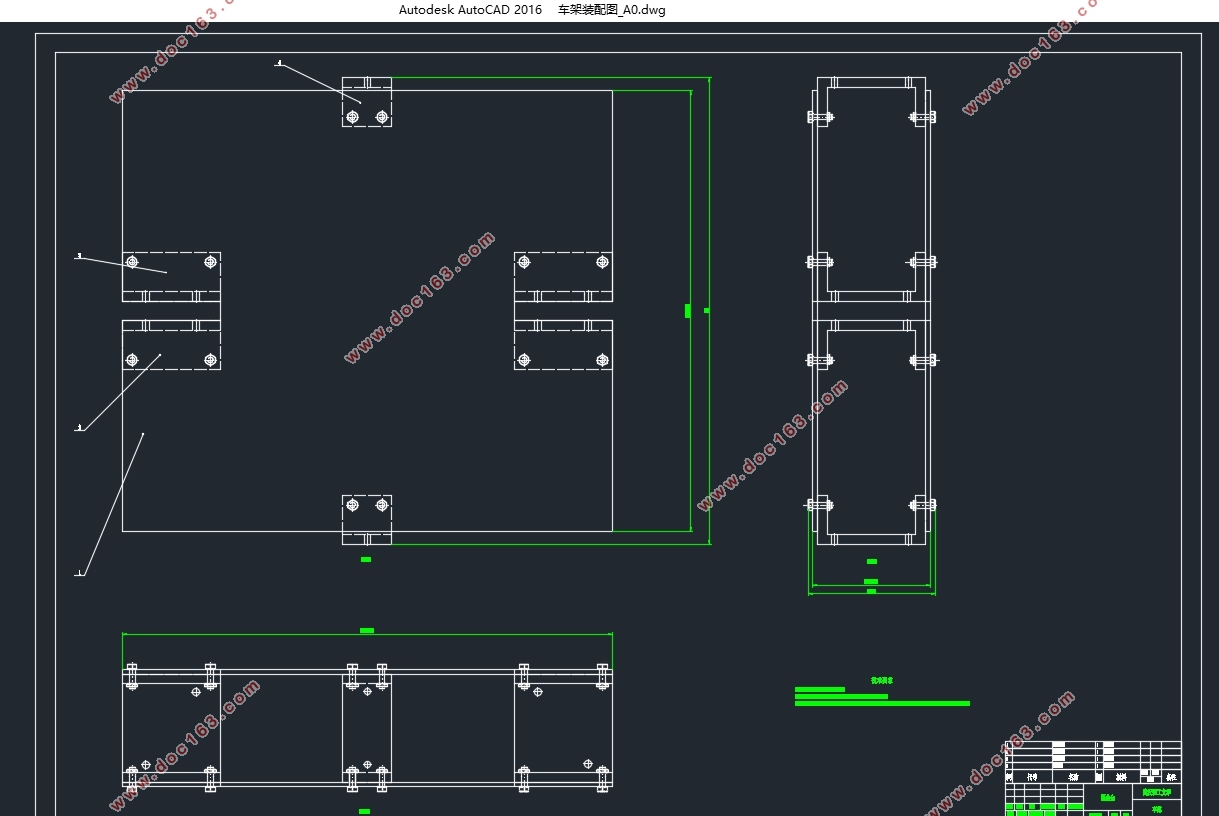
目录
第1章绪论 1
1.1 目的及意义 1
1.1.1 轮式爬行器介绍 1
1.1.2 六轮轮式爬行器的优点 1
1.2 国内外研究现状 2 [来源:http://www.think58.com]
1.3 研究内容介绍 3
1.4 小结 4
第2章方案设计 5
2.1 爬行器介绍 5
2.1.1 爬行器车架介绍 5
2.1.2 爬行器双曲柄越障机构 5
2.1.3 爬行器侧部平行四边形越障机构 6
2.2 设计及计算 6
2.2.1 爬行器车轮设计 6
2.2.2 爬行器侧部平行四边形越障机构设计 8
2.2.3 爬行器曲柄连杆越障机构设计 9
2.2.4 爬行器车架设计 17
2.2.5 爬行器电机设计与选型 19
2.3 小结 23
第3章爬行器运动学分析 24
3.1 爬行器逆运动学模型建立 24
3.2 小结 26
第4章爬行器运动仿真 27
4.1 爬行器的Adams仿真 27
4.2 小结 28
第5章爬行器控制 29
5.1 爬行器控制方式分析 29
5.2 爬行器代码编写 29
第6章结论 33
参考文献 34
附录 35
致谢 43
[资料来源:http://www.THINK58.com]