
写字机器人结构设计(手臂式)(含CAD零件图装配图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
写字机器人结构设计(手臂式)(含CAD零件图装配图)(论文说明书8000字,CAD图6张)
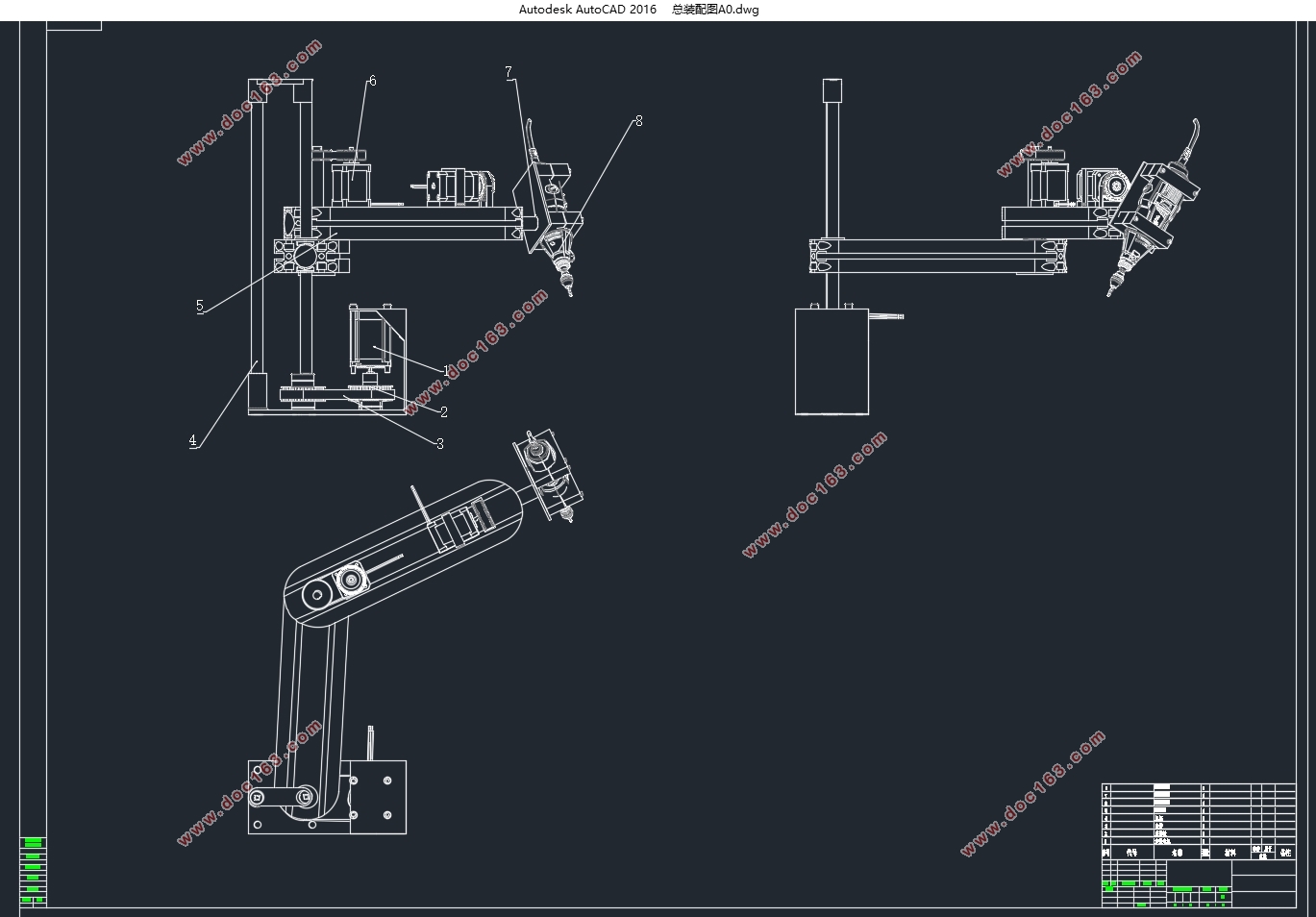
总体方案设计
2.1、总方案论述
本文所设计的写字机械臂的具体参数如下:腕关节回转范围±45°最大转速25r/min,肘关节移动范围220mm,最大移动速度50~100mm/min
具体任务要求如下:
1.根据写字机器人工作原理和性能参数的要求,计算相关的技术参数。
2.合理设计写字机器人的整体结构,确定设计思路,并绘制出整体结构示意图。
3.具体结构的确定,零部件的尺寸设计、校核计算,进行电机的选择,传动装置的设计。
4.绘制各个零部件及机构的图纸。
2.1.1 驱动系统
本次机械臂的驱动系统采用伺服电机,因为伺服电机有着良好的控制性能,还有着较好的灵活性,体积小便于布置,而且伺服电机可以满足小而严苛的运动控制和精确控制小臂多点运动等。
2.1.2 传动系统
机械臂传动系统通常采用齿轮、蜗杆、滚珠丝杠、皮带、链条传动等等,还包括传动齿轮、行星齿轮等机构。
2.2总体方案设计
为了实现写字机械臂的空间三方向旋转运动,我们采用以下结构形式。此种结构运动灵活,结构紧凑,占地面积小。此种结构相对机械手本体,有着较大的运动空间。此种结构广泛运用于各种工业领域。 [来源:http://think58.com]
[资料来源:www.THINK58.com]

目录
摘要 1
ABSTRACT 2
一、绪论 4
1.1 引言 4
1.2国内外研究现状 4
二、总体方案设计 6
2.1、总方案论述 6
2.2 总体方案设计 6
三写字机械臂大臂的结构设计 8
3.1 设计基本要求 8
3.2 机构设计 8
3.3 驱动系统选型 9
3.4 承载能力计算 9
[资料来源:http://THINK58.com]
四、写字机器人末端结构设计 14
4.1 结构设计与校核 14
五、传动结构的设计 22
5.1 轴的设计 22
5.2 轴承校核 29
六、总结 33
七、致谢 34
八、参考文献 35 [来源:http://www.think58.com]