
��תʽ��е�ֻ�еϵͳ�����(��CADͼ,PROE��άͼ)

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.���Ͻ���ѧϰ�ο�֮��.
�� �� ��
��תʽ��е�ֻ�еϵͳ�����(��CADͼ,PROE��άͼ)(������,���ⱨ��,���ķ���,����˵����8000��,CADͼ7��,PROE��άͼ)
ժҪ
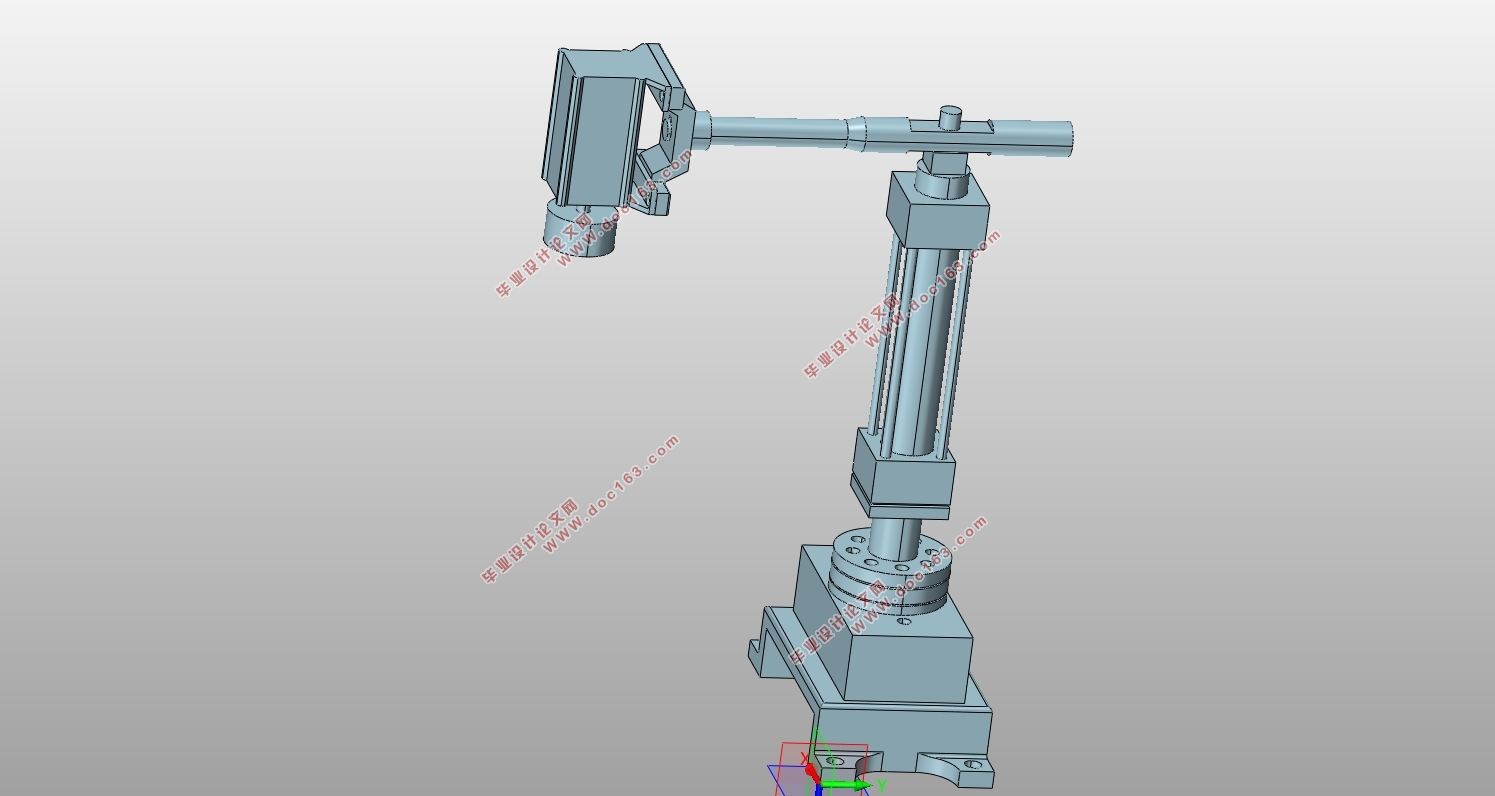
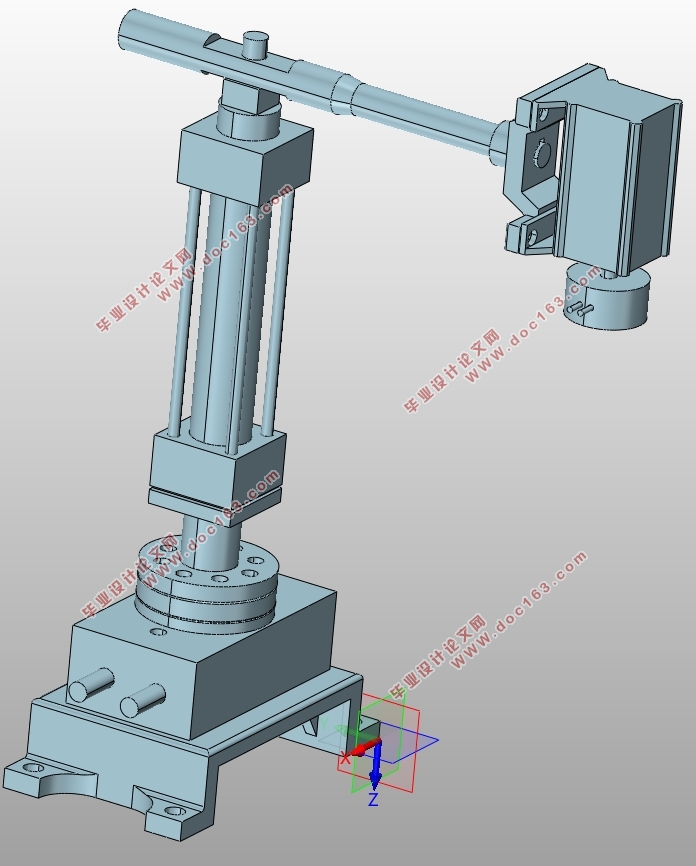
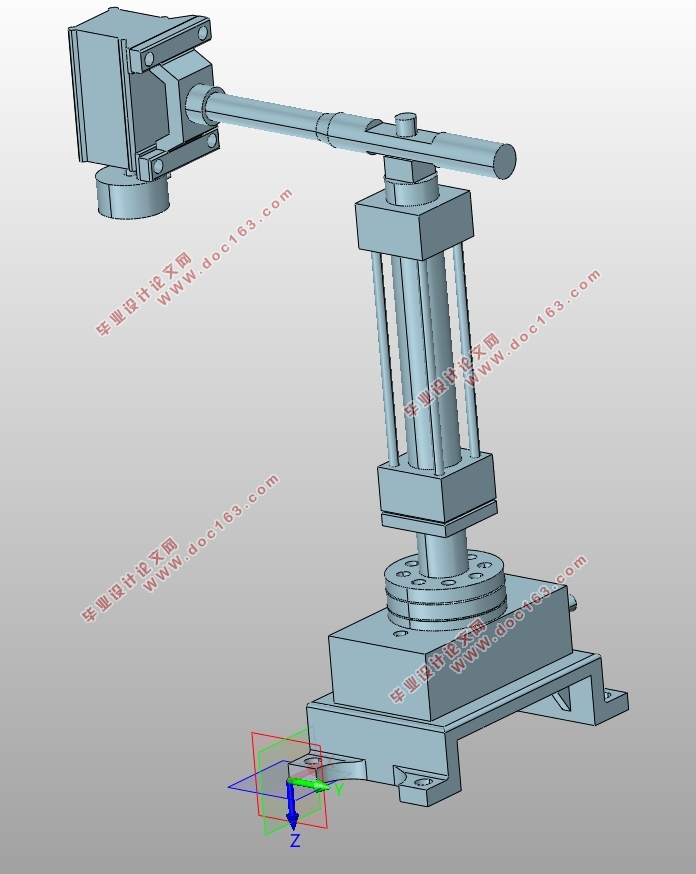
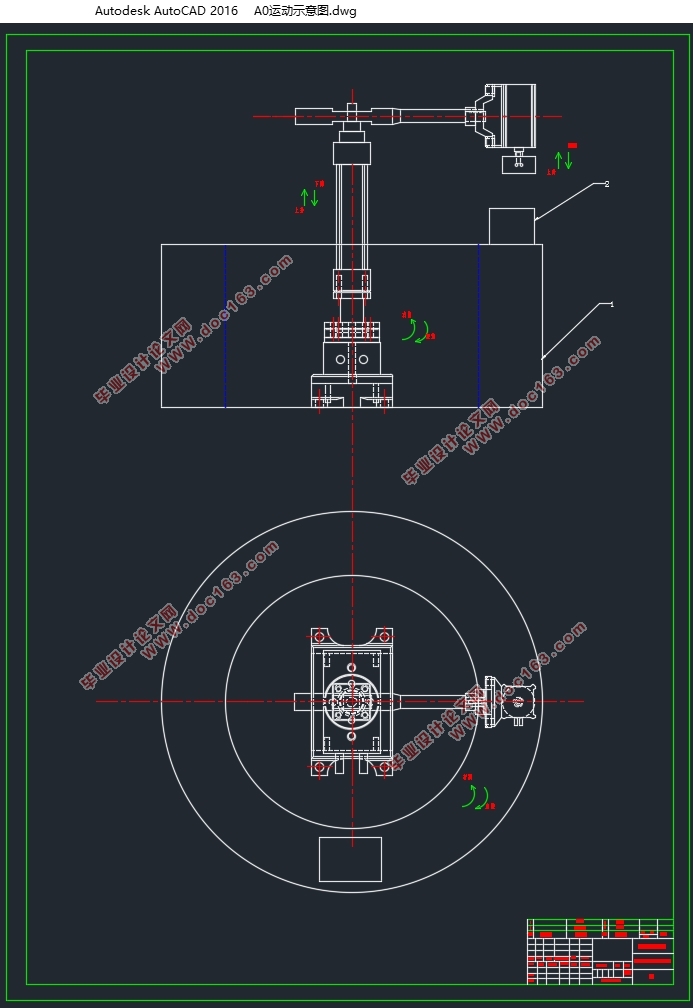
�ڵ�������������������У���е�ֵ����ó̶ȳ�Ϊ�������칤���Զ���ˮƽ��һ����Ҫָ�ꡣ��е�ֵ����ã�ʹ�������˫�ִӷ������ظ��Թ����н�ų��������������Ч���Լ������Ŀɿ��ԡ�ͬʱҲ����ijЩ���˻����У��磺���¡���ѹ����ա����Եȣ��û�е����������ֱ������Щ���˻����Ӵ���ʹ�ù������������˺�����е���ڹ�ҵ�����ĸ������ڶ���ʾ���ɱ���ľ������ƣ�������������������еõ��˹㷺���Ͽɡ����Ľ����˻���Բ�����������µĻ�תʽ���ۻ�е�ֵĻ�еϵͳ��ƣ������������Ҫ���ڽ�ѧĿ�ĵĻ�еģ�͡��Ի�е�ֵ�Ҫ���ǣ���00��1800��Χ֮�䣬��һ����500g�Ľ������һ��ƽ̨������һ��ƽ̨������������ʹ�������Լ�ʹ��Ŀ�ģ�����ѡȡ�ṹ��Ϊ��Բ�������еϵͳ���гֲ���ʹ�õ������ʽץ�֡����ǵ���ѧĿ�Ĺ����Ļ���������ѡȡ��Ϊ������ѹ������ʽ����������л�е�ֻ�е�����Ķ�����һ������ṹ���ϸߵĿɿ��ԣ�����װ�䣬�����ڻ�е��ơ���ѹ��������ؿγ�ʵ���ѧ�е�ԭ�����ͺ�װ����ϰ��
�ؼ��ʣ���е����ѹ�GԲ������������
The design of the mechanical system of the Rotary Manipulator
Abstract
In the process of manufacturing production in today's society, the degree of application of the manipulator is an important indicator to measure the level of automation in manufacturing plant. The use of manipulator, liberate human hands from the complicated repetitive work and improve the production efficiency and production reliability. At the same time, in some extreme environments, such as high temperature, high pressure, vacuum, toxicity and so on. Due to the replacement of the direct contact with these extreme environments, the workers are protected from injury. The use of manipulator in all aspects of industrial production have shown unparalleled competitive advantage, so in the manufacturing process has been widely recognized. This paper describes the design of mechanical system based on cylindrical coordinates considering the condition of the use of manipulator. The design is mainly used for the mechanical model of teaching objective. The requirements of the manipulator: range from 00 to 1800, move a 500g metal from one platform to another platform. Based on the use condition above, we select the relatively simple structure of cylindrical coordinate manipulator system, and the clamping part using the electromagnetic absorption type starting point. Taking the teaching purpose of the work environment into consideration, we select a more environmental pneumatic transmission. The manipulator movements in this design is simple, simple structure, high reliability, easy assembly, so this design is suitable for mechanical design, pneumatic transmission and other related courses in the experimental teaching of the principle , assembly and disassembly practice. [������Դ��http://THINK58.com]
Key words: Manipulator Pressure candle Cylindrical coordinates Electromagnetic absorption
 [��Ȩ���У�http://think58.com]
[��Ȩ���У�http://think58.com] 
Ŀ¼
ժҪ I
Abstract II
��һ������ 1
1.1���� 1
1.2��ҵ������-��е�ּ�� 1
1.2.1��ǰ��е�ֵ�Ӧ�� 1
1.2.2��е�ֳ��ýṹ�����ص� 1
1.2.3��תʽ��е�ֵĽṹ 2
1.2.4�ֽλ�е�ֵķ�չ�ص� 4
�ڶ���������� 5
2.1�����Ҫ��������� 5
2.2�о��ÿ�����õ��ֶ� 5
[��Ȩ���У�http://think58.com]
�����»�תʽ��е�ֻ�еϵͳ����� 6
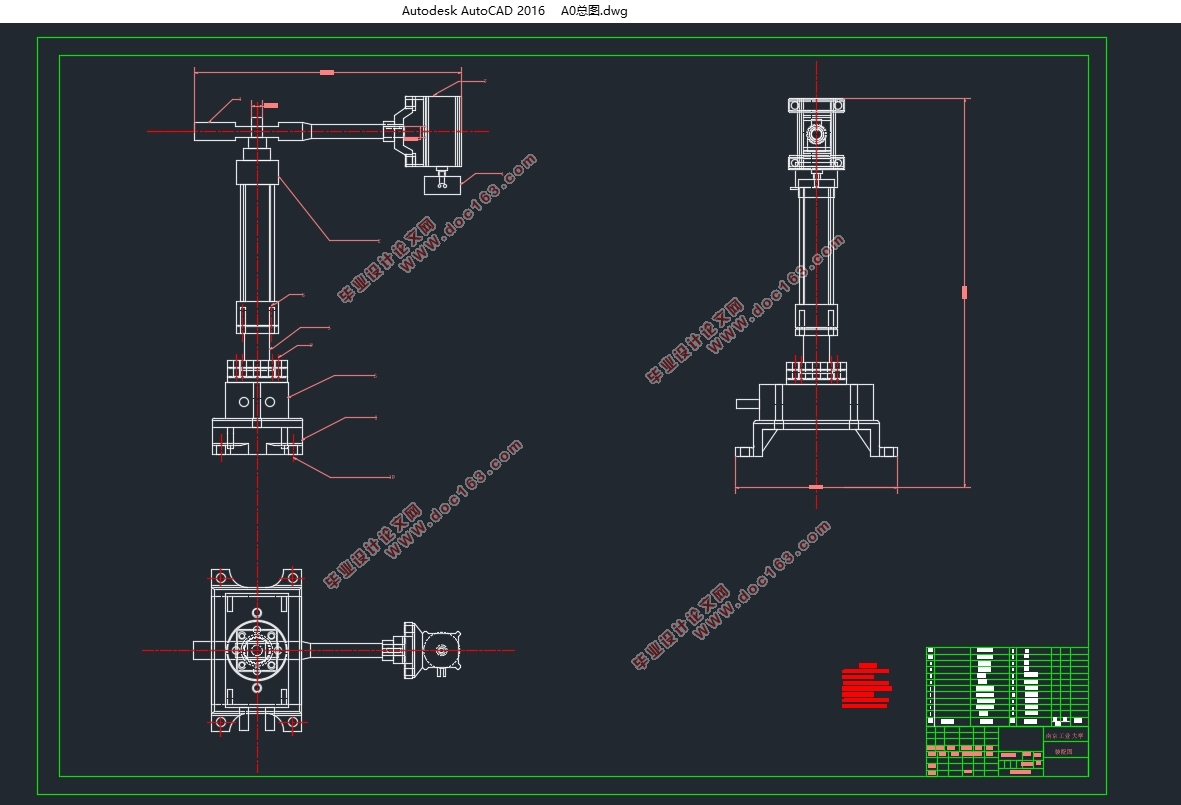
3.1��е�ֽṹ��ͼ����� 6
3.2��е���������ֵ������У�� 10
3.2.1������ת��ѡ����У�� 10
3.2.2������ѹ��ѡ����У�� 11
3.2.3��ѹ�����ת�����ӷ�������� 13
3.3��е�ֵ������ֵ������У�� 14
3.4��е�ִ�۲��ֵ������У�� 15
3.5��е��ץ������ѡ����У�� 16
3.6��е��ץ������֧�ܵ���� 18
3.7��е��ץȡ���ֵ������У�� 19
�����»�е�ֵ���ά��ģ�붯̬���� 21
4.1 PRO-E����������� 21
4.2PRO-E��ά��ģ 21
���� 22
����� 23
л�� 25 [������Դ��THINK58.com]
��һƪ��Һѹ������̨ϵͳ���(��CAD���ͼװ��ͼ)
��һƪ��PM300����ģ�ɷ����������(��CAD���ͼװ��ͼ)