
三轴工业机器人的结构设计(含CAD零件图装配图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
三轴工业机器人的结构设计(含CAD零件图装配图)(论文说明书10000字,CAD图纸8张)
设计的任务要求
本次设计是针对三轴工业机器人的结构设计。
主要设计要求如下:
第一轴:转动角速度为 90/s,转角范围为0~270
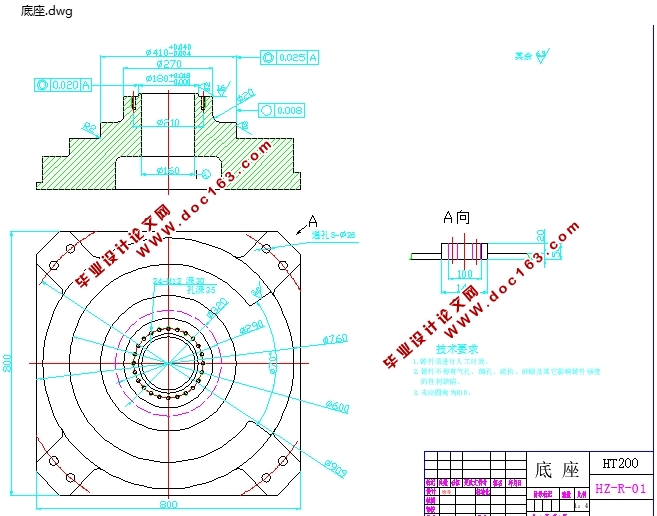
底 座:能够实现第一臂转角(0-270度)转角范围控制
2.1总体结构的概述
目前,世界上已有许多工业机器人,其中大部分属于“示教再现”型。如果将这类机器人称作第一代,那么,具有一定程度的视觉、触觉、或某种分析、判断能力的工业机器人就属于第二代了。不少国家正在积极研制具有观觉、触觉等功能的工业机器人,并取得了不少成果,但是,真正将这些成果应用于生产实际的还为数不多。在实际生产(如喷漆、焊接、装配等)中被广泛应用的工业机器人,示教再现型还是较多。
一般的机器人,它由机器人的机构部分、传感器组、控制部分及信息处理部分构成。机构部分有机械手和移动机构两部分组成;传感器有测量机器人自身位置姿态和速度、加速度的内传感器和了解外部环境及作业对象工作情况的外传感器;控制器是直接控制机器人运动的装置,只要不是自主型移动机器人,它通常放在与机器人不同的地方,通过导线连接。在工业机器人的控制装置中,有电动机驱动电路、PTP运动目标点和CP运动轨迹数据的记忆装置和定位控制电路等。信息处理装置通过信息传输装置与机器人本体相连,多用于智能机器人。 [资料来源:www.THINK58.com]
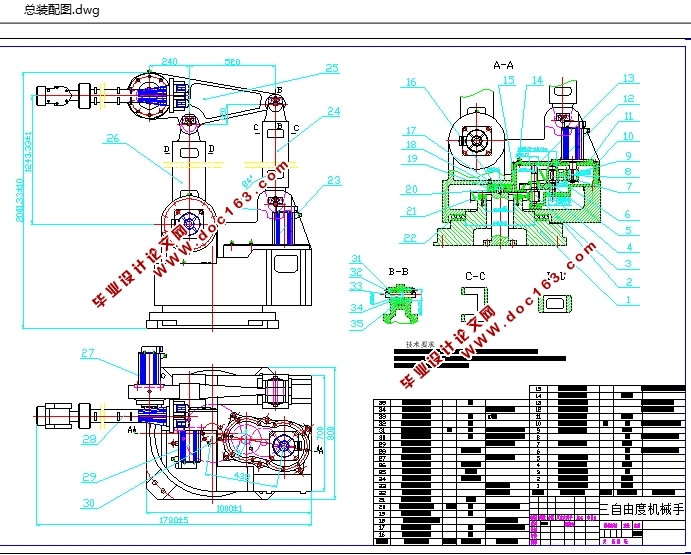
如图2-1,该机器人具有六自由度,即大臂的回转、臂的左右摆动、臂的上下摆动、手腕的回转、手腕的伸缩和手爪的抓取。当然,图中没有表示出控制系统及手爪抓取的那一部分。
该六自由度机器人运动的情况说明如下:首先,由电动机M1经过传动系统带动大臂的回转运动,且与大臂相连的所有其它手臂、手腕及机械构件也随大臂一起作回转运动;而后另一手臂由电动机M2直接驱动作左右摆动;还有,第三臂由电动机M3直接驱动作上下摆动;最后,手腕的回转、伸缩及手爪的抓取由其它三个电动机驱动。
该方案是三轴工业机器人结构设计,工业机器人一般由执行系统、驱动系统、控制系统和人工智能系统组成。目前,具有人工智能系统的工业机器人即智能机器人还处于研究实验阶段。而应用于生产实际的多数是那些具有执行系统、驱动系统和控制系统的工业机器人。
一般的机器人,它由机器人的机构部分、传感器组、控制部分及信息处理部分构成。机构部分有机械手和移动机构两部分组成;传感器有测量机器人自身位置姿态和速度、加速度的内传感器和了解外部环境及作业对象工作情况的外传感器;控制器是直接控制机器人运动的装置,只要不是自主型移动机器人,它通常放在与机器人不同的地方,通过导线连接。在工业机器人的控制装置中,有电动机驱动电路、PTP运动目标点和CP运动轨迹数据的记忆装置和定位控制电路等。信息处理装置通过信息传输装置与机器人本体相连,多用于智能机器人。 [版权所有:http://think58.com]
该机器人具有六自由度,即大臂的回转、臂的左右摆动、臂的上下摆动、手腕的回转、手腕的伸缩和手爪的抓取。
该六自由度机器人运动的情况说明如下:首先,由电动机M1经过传动系统带动大臂的回转运动,且与大臂相连的所有其它手臂、手腕及机械构件也随大臂一起作回转运动;而后另一手臂由电动机M2直接驱动作左右摆动;还有,第三臂由电动机M3直接驱动作上下摆动;最后,手腕的回转、伸缩及手爪的抓取由其它三个电动机驱动。
[资料来源:http://think58.com]
目录
引言 1
第一章 概 述 2
[资料来源:www.THINK58.com]
1.1工业机器人的含义及技术概述 2
1.2工业机器人的组成 3
1.3 工业机器人的现状及国内外发展趋势 3
1.4 设计的任务要求 5
第二章 机器人的结构分析 5
第三章 设计计算 10
第四章 传动结构的设计计算 12
4.1 第一轴的传动结构设计 12
4.2轴承的选择 27
第五章机器人各零部件的结构设计 29
5.1 转角范围的控制设计 29
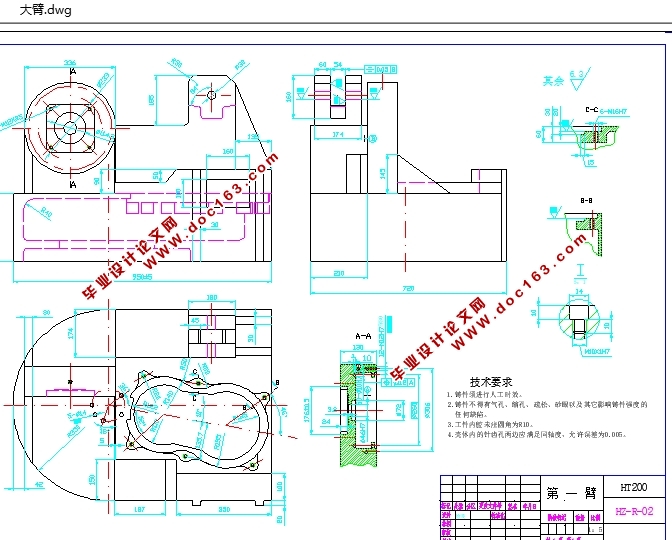
5.2主要零部件的结构设计(第一臂与底座) 30
总 结 31
致 谢 32
参考文献 33 [资料来源:THINK58.com]