
全向轮驱动球形机器人传动结构的设计(含CAD零件图装配图,UG三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
全向轮驱动球形机器人传动结构的设计(含CAD零件图装配图,UG三维图)(论文说明书12000字,CAD图纸7张,UG三维图)
摘要
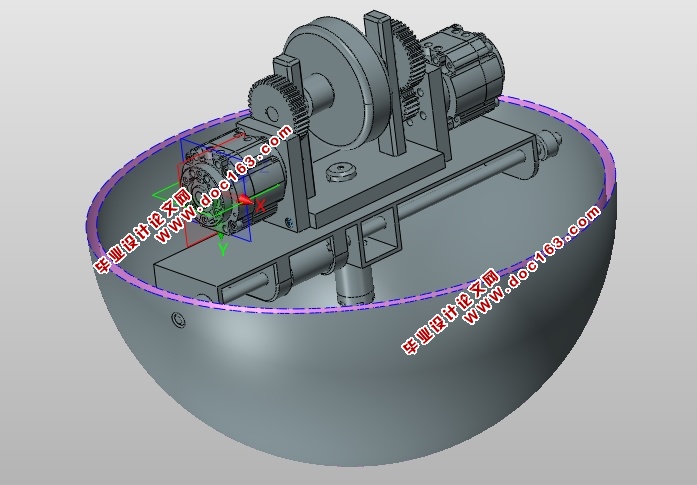
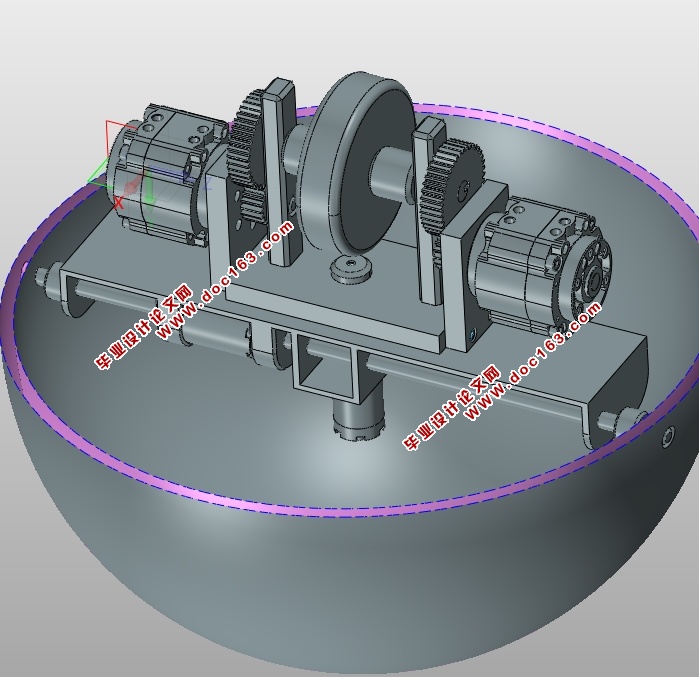
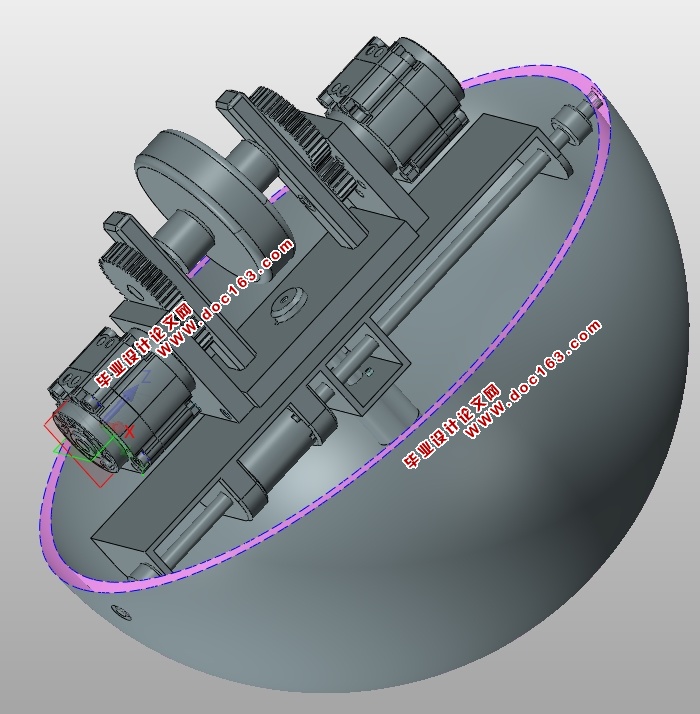
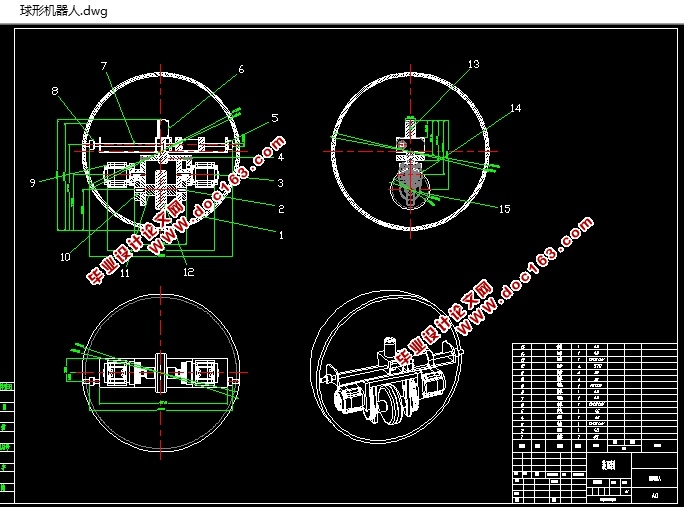
本文就全向轮驱动球形机器人的未来发展趋势和目前状况作出了相应的概括。根据相应的指标、参数,在满足标准化型材的前提下对全向轮驱动球形机器人的整体进行结构设计。关于一些重要的零部件做了详细分析和原理作用。因为,全向轮驱动球形机器人在工作的过程中会受一些应力的影响进而可能会发生变形,。而且它要求的是在最小的尺寸空间里能够实现三个运动方向运动范围的最大化。本文设计中主要使用了CAD、Ug 等工程制图软件,用Ug三维建模,CAD画出二维液态模锻图。
关键词:全向轮驱动球形机器人,结构设计,三维建模
[来源:http://www.think58.com]
 [资料来源:http://www.THINK58.com]
[资料来源:http://www.THINK58.com] 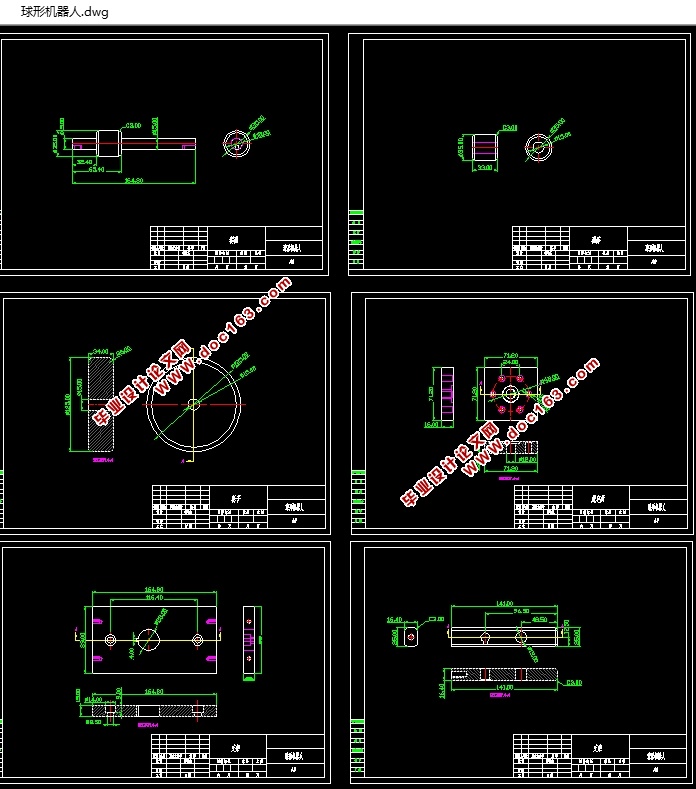
目 录
摘要 1
第一章 绪论 2
1机器人研究的目的和意义 2
2 机器人国内外发展现状 2
3 机器人的分类 3
第二章 方案的论证与设计 4
2.1 控制方案选择 4
2.2 元器件及控制器设计与选择 5
2.2.1 控制器选择 5
第三章 控制系统设计 6 [资料来源:THINK58.com]
3.1 机器人控制系统分类 6
3.2 控制系统方案分析 6
3.3 控制系统特点 6
3.4 机器人的控制系统方案确定 7
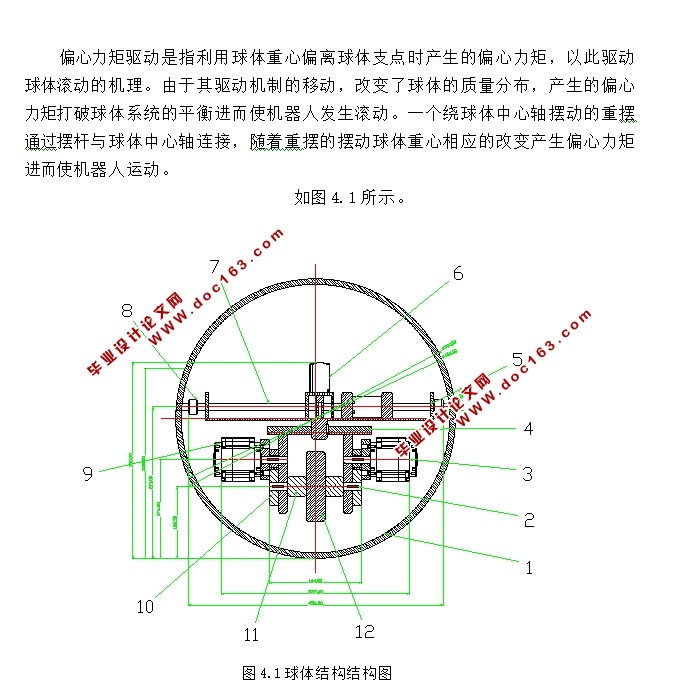
第四章 球体结构的结构设计 8
4.1电机的选择 9
4.2减速器的选择 10
4.3螺柱的设计与校核 10
4.4、球形机器人主要零部件设计计算 12
1、整体机架强度的计算 12
2、支架变形度计算 15
4.5,转轴的设计方法: 17
1、转轴中央断面设计 17
4.6,机架的固定机构的设计: 19
1,转轴中央断面合成应力: 19
4.7、球形机器人装配图 20
4.8、主要零件的设计计算 21
1 机架的设计 21
2 轴的设计计算 21
3.作用在连轴器上的力 22
4.初步确定轴的最小直径 22
5 .轴的结构设计 22
6 轴的强度计算 23
7 主动连轴器轴的设计计算 24
8传动结构及设计 25
第五章 全向轮驱动球形机器人固定方式 28
5.1常用的定位方式 28
5.2 影响因素 28
5.3全向轮驱动球形机器人运动的缓冲装置 29
第六章 全向轮驱动球形机器人的控制 31
第七章 全向轮驱动球形机器人的组成与分类 31
7.1全向轮驱动球形机器人组成 31
总结 32
参考资料 33