
履带式机器人移动底盘的设计(含CAD零件装配图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
履带式机器人移动底盘的设计(含CAD零件装配图)(外文翻译,论文说明书11600字,CAD图纸8张,答辩PPT)
摘要
此设计是设计结构新颖,能实现过坑、越障等动作的机器人底盘。通过在机器人机架上加装其他功能的模块来实现不同的使用功能,本设计的目的是为机器人提供一个动力输出平台,为开发各种功能的机器人提供基础平台。
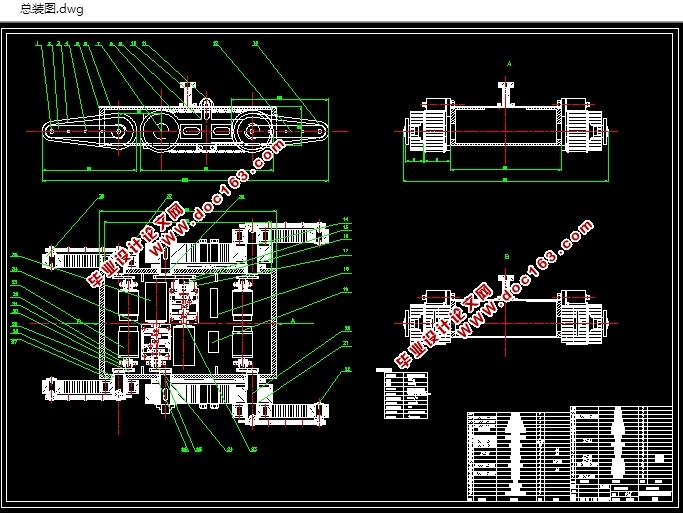
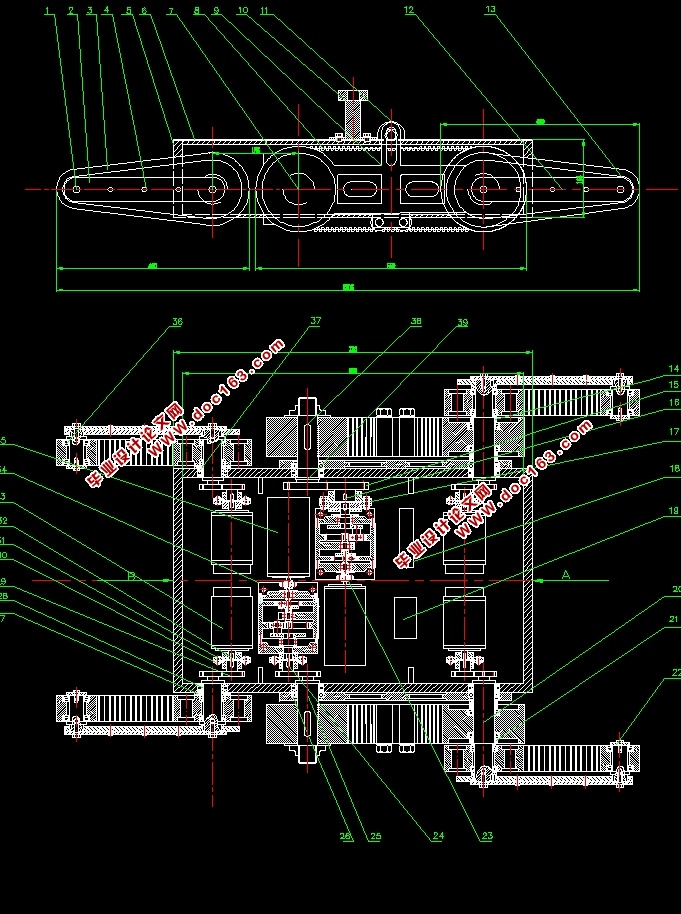
此设计移动方案的选择是采用了履带式驱动结构。结构整体使用模块化设计,以便后续拆卸维修,可以适应于各种复杂的路面,并可主动控制前后两侧摇臂的转动来调节机器人的运动姿态,从而达到辅助过坑、越障等动作。经过合理的设计后机器人将具有很好的环境适应能力、机动能力并能承受一定的掉落冲击,此设计的移动机构主要由四部分组成:主动轮减速机构、翼板转动机构、自适应路面执行机构、履带及履带轮运动机构。
关键词 移动式;机器人;履带式;底盘;模块化设计
Abstract
This design is a robotic chassis with a novel design structure that enables pits and obstacles to move. Through the addition of other functional modules to the robot rack to achieve different usage functions, the purpose of this design is to provide a power output platform for the robot and to provide a basic platform for robots that develop various functions
The design of this design mobility scheme is the use of a tracked drive structure. The entire structure uses a modular design for subsequent demolition and maintenance, which can be adapted to various complex road surfaces, and can actively control the rotation of the rocker arms on both sides to adjust the movement posture of the robot to achieve auxiliary over-hole and obstacle-over actions. After a reasonable design, the robot will have good environmental adaptability, mobility and can withstand a certain drop impact. This design of the mobile mechanism is mainly composed of four parts: the active wheel deceleration mechanism, the flap rotation mechanism, adaptive road surface Actuator, crawler and track wheel movement agencies.
Keywords robot tracked mobile mechanism modular design
主要机构的工作原理
转向机构:在行驶过程中,机器人需要经常改变行驶方向,通过两个电机的差速比来实现机器人的转向。
减速传动机构:通过行星轮减速器的降速,减速传动机构能实现增大转矩、调速,轴的方向通过直齿轮改变,输出后轴转矩,为机器人提供主要动力。后轴驱动机构驱动后轴位于传动系的末端。实现增扭、降速和改变转矩的传递方向等的基本功能。 [资料来源:THINK58.com]
动力部分采用电机,低速轴的转动由齿轮副降速后带动,通过导杆滑块机构对轴与履带驱动机构进行连接,使履带驱动机构各自绕前后轴的中心线转动,使机器人能在不同角度完成爬坡和越障。
[来源:http://think58.com]

[版权所有:http://think58.com]
目 录
摘要 I
Abstract II
1 绪论 2
1.1 机器人的现状及发展 2
1.2 履带式机器人的概述 3
1.3 本设计的目的及意义 3
2 移动机构的分析及其选择 5
2.1 典型移动机构 5
2.1.1履带式移动机构的特点 5
2.1.2轮式移动机构的特点 5
2.1.3腿式移动机构的特点 6
3 设计方案 7
3.1 行走机构的选择 7
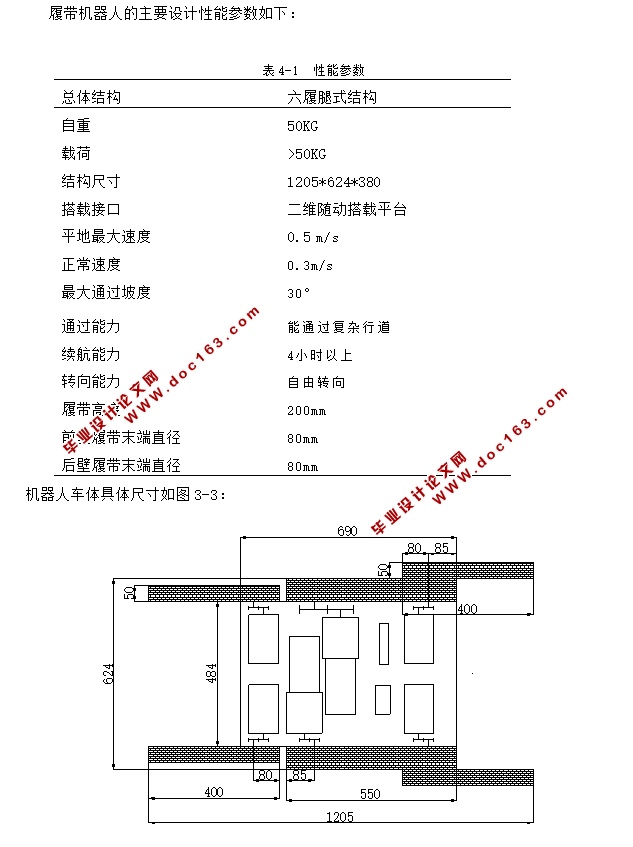
3.2 履带机器人功能、性能指标与设计 8
3.3 主要机构的工作原理 9
4 机器人移动底盘主履带电机的选择 10
4.1 机器人在平直的路上行驶 10
4.2 机器人在30°坡上匀速行驶 10
4.3 机器人的多姿态阶跃 11
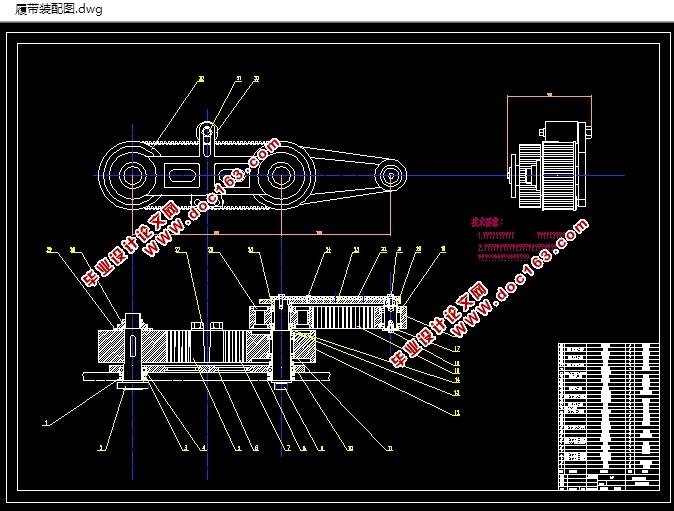
5 履带部分设计 13
5.1 履带的选择 13
5.2 确定主从动轮直径 14
5.3 确定节线长度 15
5.4 计算所需的带宽 16
5.5 功率验算 18
5.6 履带主从动轮设计 18
5.7 副履带部分设计 20
6 履带翼板部分设计 23
6.1 履带翼板的作用 23
6.2 履带翼板的设计 23
结论 24
致谢 25
参考文献 26 [来源:http://www.think58.com]