
X射线C型臂系统结构设计(含CAD图,SolidWorks,IGS三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
X射线C型臂系统结构设计(含CAD图,SolidWorks,IGS三维图)(论文说明书13700字,CAD图纸8张,SolidWorks三维图,IGS通用三维格式)
本课题来源于当今社会医疗工业医疗康复设备的创新和更新换代基础之上,通过设计出X射线C型臂系统结构,从而来满足当今社会医疗、康复设备不足的缺陷。
国内X射线C型臂系统结构的研发及制造要与全球号召的高效经济、治疗效果好,效率高等主题保持一致。近期对医疗机械行业中X射线C型臂系统结构的使用情况进行了调查,发现在医疗机械行业中,X射线C型臂的使用非常普遍。自然而然在医疗机械设备中它们的安装也非常频繁。传统的X射线C型臂使用难度大,对病人身体的检测的程度不够,价格昂贵,所以设计一个新型的X射线C型臂系统结构势在必行。
本文运用大学所学的知识,提出了X射线C型臂系统结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了X射线C型臂系统结构总的指导思想,从而得出了该X射线C型臂系统结构的优点是高效,经济,并且使用方便等结论。
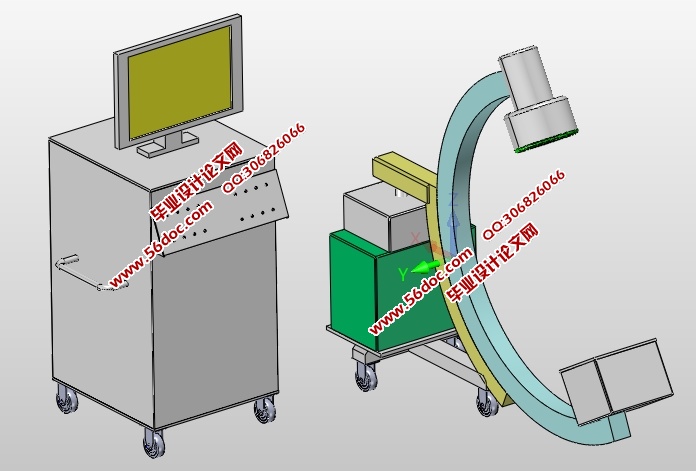
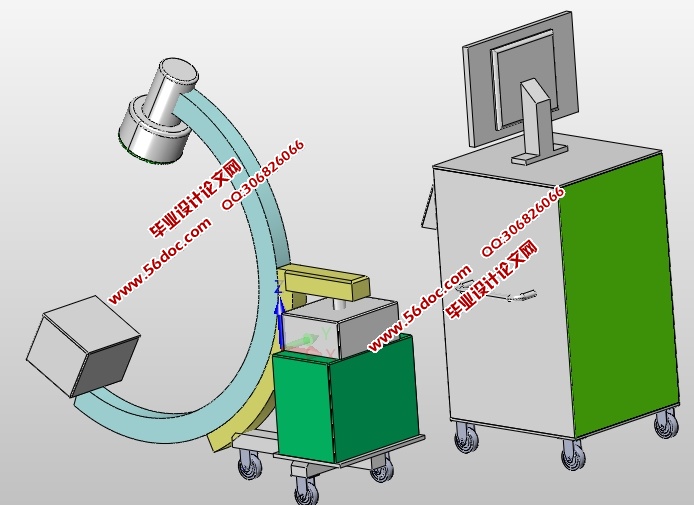
X射线C型臂系统结构的工作原理
X射线应用于医学诊断,主要依据X射线的穿透作用、差别吸收、感光作用和荧光作用。由于X射线穿过人体时,受到不同程度的吸收,如骨骼吸收的X射线量比肌肉吸收的量要多,那么通过人体后的X射线量就不一样,这样便携带了人体各部密度分布的信息,在荧光屏上或摄影胶片上引起的荧光作用或感光作用的强弱就有较大差别,因而在荧光屏上或摄影胶片上(经过显影、定影)将显示出不同密度的阴影。根据阴影浓淡的对比,结合临床 表现、化验结果和病理诊断,即可判断人体某一部分是否正常。
[版权所有:http://think58.com]
[来源:http://think58.com]
目 录
摘要 I
Abstract II
1 引言 1
1.1 课题的来源与研究的目的和意义 1
1.2 C臂X射线机的用途 2
1.3 C臂X射线机的特点 1
1.4 本课题研究的内容 3
1.5 Solidworks设计基础 4
1.5.1 草图绘制 5
1.5.2 基准特征,参考几何体的创建 6
1.5.3 拉伸、旋转、扫描和放样特征建 7
1.5.4 工程图的设计 10
1.5.5 装配设计 11
2 X射线C型臂系统结构总体结构的设计 12 [资料来源:http://www.THINK58.com]
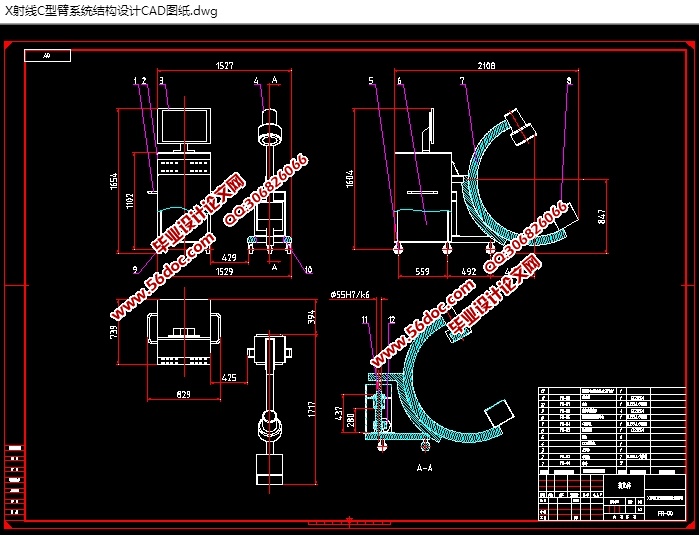
2.1 X射线C型臂系统结构的总体方案图 12
2.2 X射线C型臂系统结构的工作原理 15
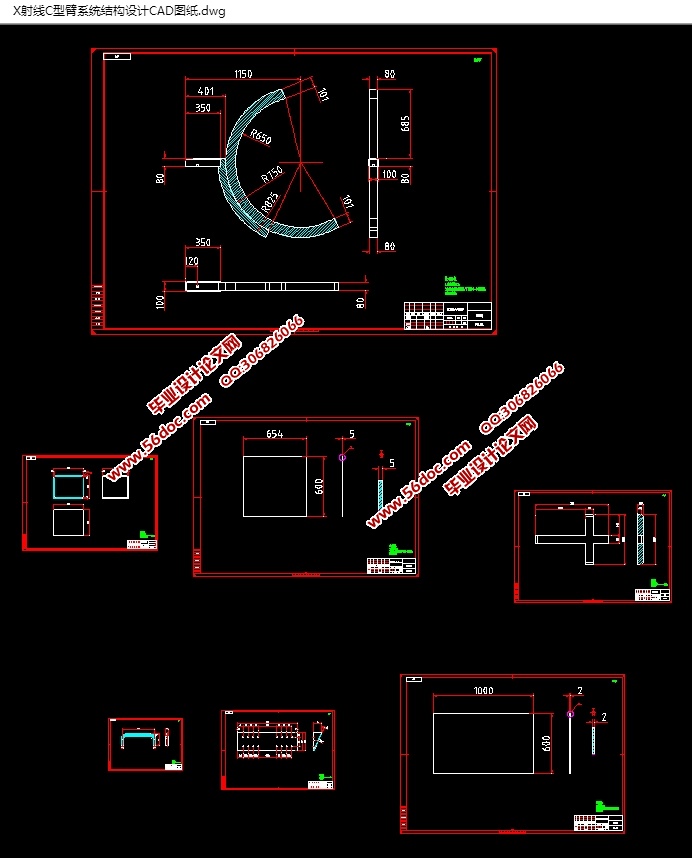
2.3 X射线C型臂系统结构的设计计算 17
2.3.1CCD摄像机的选型计算 18
2.3.2转动轴的设计计算 19
2.3.3轴承的选型计算 19
3 各主要零部件强度的校核 21
3.1转动轴强度的校核与计算 22
3.2轴承强度的校核计算 23
4 X射线C型臂系统结构中主要零件的三维建模 24
4.1控制柜的三维建模 25
4.2底架的三维建模 25
4.3脚轮的三维建模 27
4.4 C臂X射线机的三维建模 28
5 三维软件设计总结 29 [来源:http://www.think58.com]
结论 30
致谢 31
参考文献 32
[资料来源:THINK58.com]
上一篇:机械自动化的历史发展史及展望