
轮足复合式机器人的设计与研究(含CAD零件装配图,SolidWorks三维

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
轮足复合式机器人的设计与研究(含CAD零件装配图,SolidWorks三维图)(论文说明书10000字,外文翻译,CAD图纸9张,SolidWorks三维图)
轮足复合式机器人是高科技产品的典型,是人们设置指定的程序通过中控系统实现机器人横移、越障或爬坡,跨沟、转弯等多种功能的高科技智能化产品。它可代替人类在某些领域力所不能及的地方实现特定的任务和功能,能在有害环境下代替人类工作,侦查,排险等,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
本文主要进行了轮足复合式机器人的总体结构设计和控制系统设计。轮足复合式机器人的机械结构由直流电机、编码器和短臂、长臂、轮子等部分组成,可按预定程序运动,实现横移、越障、爬坡、跨沟、转弯等功能。控制系统部分的设计主要是选择合适的PLC中控系统,设计合理的PLC控制流程图,通过中控系统调节各个直流电机的转速来使轮足复合式机器人实现移动,爬坡,拐弯,越障等功能。
关键词:轮足复合式机器人;智能化;控制系统;越障
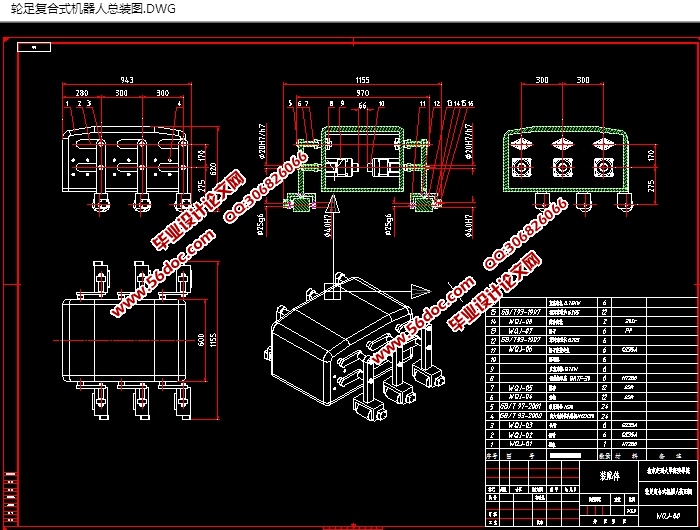
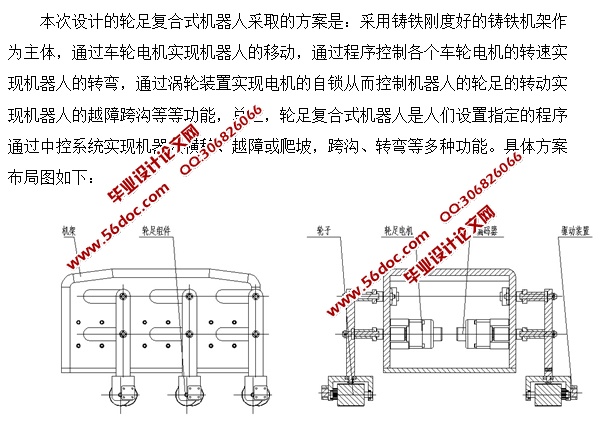
轮足复合式机器人的总体方案图
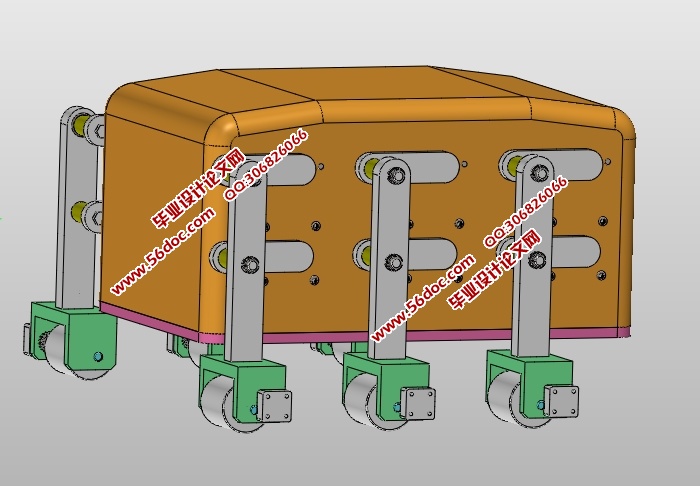
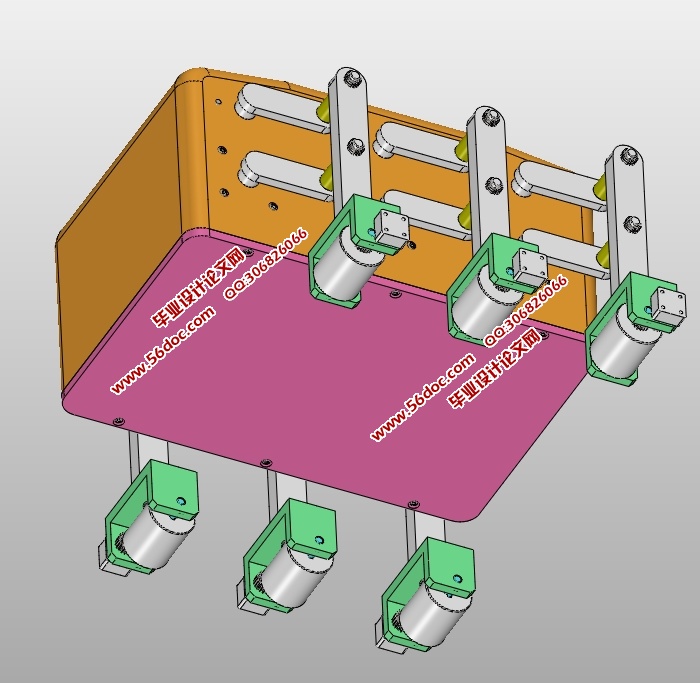
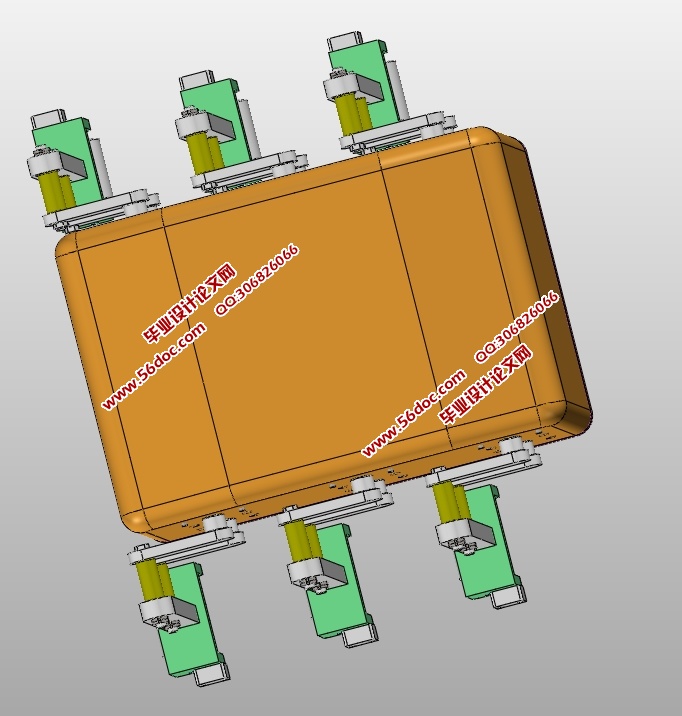
本次设计的轮足复合式机器人采取的方案是:采用铸铁刚度好的铸铁机架作为主体,通过车轮电机实现机器人的移动,通过程序控制各个车轮电机的转速实现机器人的转弯,通过涡轮装置实现电机的自锁从而控制机器人的轮足的转动实现机器人的越障跨沟等等功能,总之,轮足复合式机器人是人们设置指定的程序通过中控系统实现机器人横移、越障或爬坡,跨沟、转弯等多种功能。具体方案布局图如下:
2.2 轮足的布置形式
本次设计,是讲6个轮子分成三组,每一组轮子具有相同的运动轨迹,分别为前排轮、中排轮、后排轮,其具体的布置结构简图如下:
2.3 轮足的结构方案
轮足是机器人的核心部件轮足的摆动是通过机架立面的电机实现,而轮子的转动是通过外侧的直流电机实现的,轮足复合式机器人就是通过控制电机的转速以及相关的制动器、离合器的配合来实现跨沟,转弯,越障等等功能。其具体结构图如下:
2.4越障机构的设计
为了使机器人能够顺利地跨越一定宽度的障碍物,应该将轮足的结构设计成可以越障的结构。考虑到四连杆机构的设计较为简单,在这里我们选择四连杆机构(图1)作为轮足复合式机器人的越障机构,最主要的一点就是平行四边形连杆机构更容易控制机构的角速度,这对于机器人的整个的控制来说是最大的优点。
设计平行四边形连杆机构时,将每一组轮足设计成长臂和短臂连接。并且长臂和短臂在同一平面内转动,其平面在车身的侧面,该机构具有两个自由度。由于机构具有自锁的特点,所以当机器人越障时,只需要控制电机的转停和速度既可,而当机器人需要移动时,控制轮足的电机不让它转动而车轮电机转动就行了。
 [资料来源:http://www.THINK58.com]
[资料来源:http://www.THINK58.com] 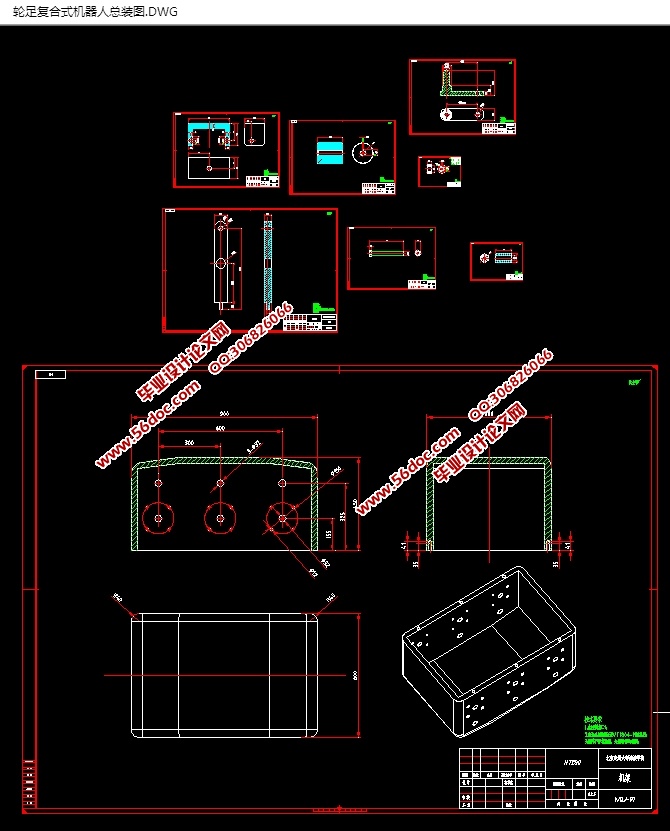
目 录
摘 要 i
ABSTRACT ii
目 录 iii
1 绪论 1
1.1课题的来源与研究的目的和意义 2
[资料来源:http://THINK58.com]
1.2 轮足式复合机器人的研究现状 4
1.2.1 轮足式复合机器人的结构的研究现状 5
1.2.2 轮足式复合机器人控制系统的研究现状 7
1.3本课题研究的内容 9
2 轮足复合式机器人总体方案结构的设计 12
2.1 轮足复合式机器人的总体方案图 12
2.2 轮足的布置形式 14
2.3 轮足的结构方案 14
2.4越障机构的设计 14
2.5 轮足的布置形式 14
2.6越障机构的设计 14
3 驱动装置的设计 18
3.1车轮电机的选型计算 20
3.2离合器的选型计算 20 [版权所有:http://think58.com]
3.3轴承的选型计算 20
3.4平键的选型计算 20
4 轮足复合式机器人的三维结构设计 21
4.1 Solidworks设计基础 21
4.1.2 草图绘制 21 4.1.3 基准特征,参考几何体的创建 21 4.1.4 拉伸、旋转、扫描和放样特征建 22 4.4.4 工程图的设计 22 4.4.5 装配设计 22
4.2轮子电机的三维建模 22
4.3轮足组件的三维建模 23
4.4短臂的三维建模 24
4.5轮足复合式机器人的三维建模 24
4.6三维软件设计总结 25
结论 26
致 谢 26
参考文献 27
附录 一 32
附录 二 36
[资料来源:THINK58.com]