
三自由度Delta并联机器人的设计与仿真(含CAD,CREO三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
三自由度Delta并联机器人的设计与仿真(含CAD,CREO三维图)(任务书,开题报告,外文翻译,论文说明书7800字,CAD零件图装配图12张,CREO图)
摘要
并联机器人是人类全新的机器人,它具有刚度大!承载能力强!精度高!自重负荷比小!动力性能好等一系列优点,与目前广泛应用的串联机器人在应用上构成互补关系,因而扩大了机器人的应用领域"Delta并联机器人是最典型的空间三自由度移动的并联机构,Delta机构整体结构简单!紧凑,驱动部分均布于固定平台,这些特点使它具有良好的运动学和动力学特性,实验条件下末端控制加速度可高达5.09-(重力加速度)"大量的实践证明,Delta机构是迄今为止设计最成功的并联机构之一"目前,Delta并联机器人己经广泛应用于化妆品!食品和药品的包装和电子产品的装配"机器人的运动学是机器人动力学!机器人控制和规划的基础,在机器人研究中占有重要的地位"运动学研究内容包括正向运动学和反向运动学,对于并联机器人,其反向运动学相对简单而正向运动学复杂"本文对三自由度Delta机器人运动学进行了研究"通过对Delta机器人结构的分析,建立了运动学模型,确定了各个构件的空间位姿"基于动平台与静平台之间的矢 量关系以及机构的约束方程,建立了该机构的运动学方程,推导出位置反解公式,同时给出了位置正解的数值解法"在位置反解方程的基础上,分析了Delta机器人的工作空间,推导出该机构的雅可比矩阵,并对速度和加速度进行了求解.。
关键词: 机器人,方案,设计,仿真
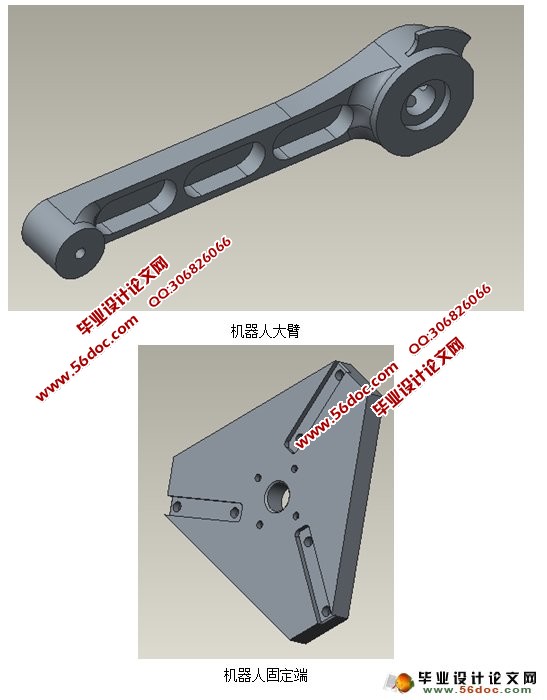
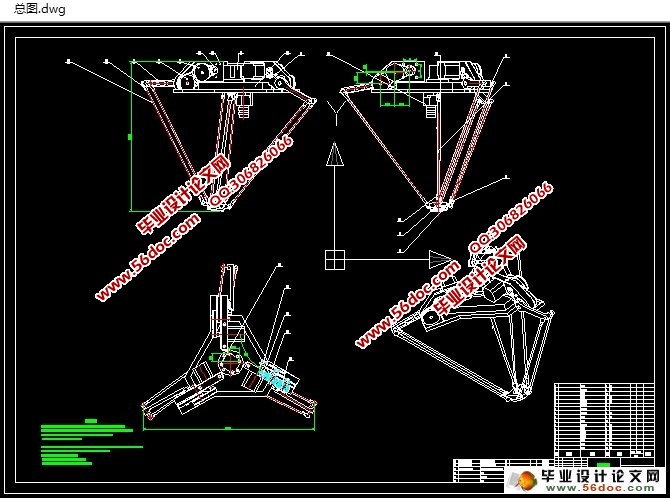
设计一种直线型Delta并联机器人,动平台与静平台之间通过三条支链连接。通过安装在固定框架上的三个直流电机结合滚珠丝杠副产生的直线运动,使动平台具有一个平动自由度和两个转动自由度。每个电机安装有编码器用于检测其转角,通过机构运动学建模可计算出动平台的位姿信息,并用于实现对机器人的控制。
设计要求:
1.外形尺寸600x600x800;
2.竖直方向平移范围:±100mm,水平方向转动范围:±15°;
3.动平台最大承载5kg;
[资料来源:http://www.THINK58.com]


[资料来源:http://www.THINK58.com]
目录
摘要 2
第1章 引言 3
1.1. 我国机器人研究现状 3
1.2. 工业机器人概述: 4
1.3. 本论文研究的主要内容 4
第2章 机器人方案的设计 9
2.1. 机器人机械设计的特点 9
2.2. 与机器人有关的概念 10
2.3. 工业机器人的组成及各部分关系概述 12
2.4. 工业机器人的设计分析 13
2.5. 方案设案 13
2.6. 自由度分析 14
2.7. 机械传动装置的选择 15
2.7.1. 滚珠丝杠的选择 15
第3章 零部件设计与建模 18
3.1. Croe软件介绍 18
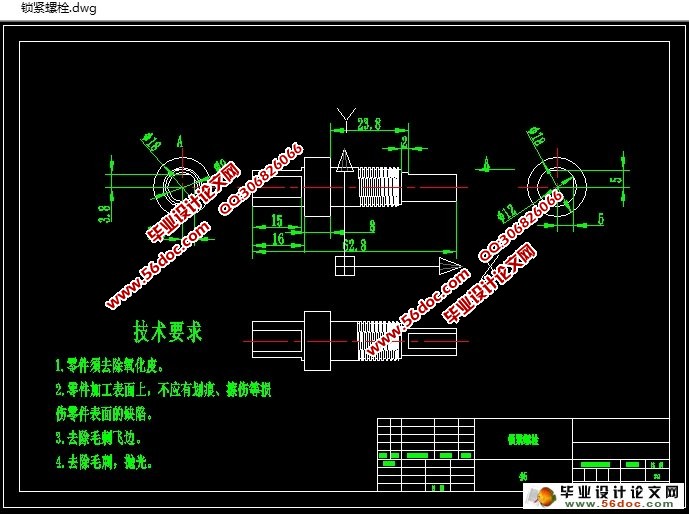
3.2. 关键零部件建模 18
3.3. 各部分的装配关系 25
第4章 仿真分析 29
第5章 致谢 33
参考文献 33 [来源:http://think58.com]