
机器人伺服滑台机械系统设计(含CAD零件装配图)

以下是资料介绍,如需要完整的请充值下载.
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
资料介绍:
机器人伺服滑台机械系统设计(含CAD零件装配图)(任务书,设计说明书12900字,CAD图纸4张)
机器人伺服滑台机械系统设计的关键参数
(1)机器人伺服滑台的最大运行速度为:2m/s。
(2)机器人伺服滑台的机器人及连接部分重量假定为:250kg
(3)伺服滑台的总长度按照14m进行设计,有效运动长度不得低于11m
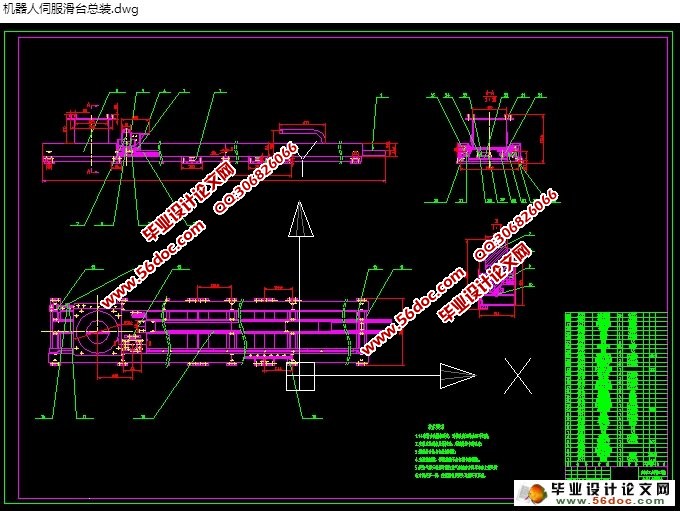
机器人伺服滑台传动工作原理
机器人伺服滑台的工作原理是:由伺服电机电机连接变速器,再由变速器连接齿轮,由齿轮齿条的啮合装置带动直线导轨来回移动,从而实现机器人伺服滑台的整体横向移动,实现相关的工作要求。
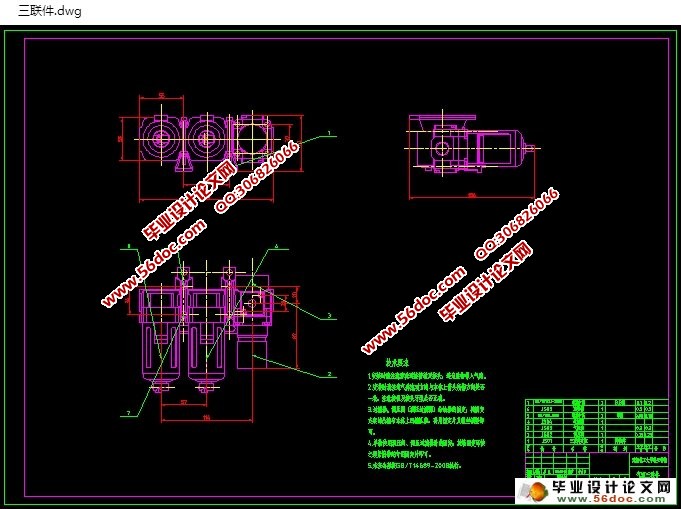
电机的选择
根据机器人伺服滑台工况初采用齿轮齿条传动机构,选用伺服电机,封闭式结构,电压为380v,Y型
本设计对机器人伺服滑台机械系统的滑台部分进行了研究,利用机器人的优势,配合伺服电机,再加上直线导轨一,使得整个机构便于操作,运行方便,可以可靠地满足工业上的要求,保质保量的完成相关的工作。使得该设计显得相当的有效。另外,对车间的生产加工的效率得到了很大的提高。与此同时,对我国的现代工业具有极大的驱动作用。
[资料来源:http://think58.com]

目 录
引言 1
第一章 机器人的发展背景 2
1.1国际机器人发展态势 2
1.2我国机器人发展现状 3
1.3我国发展机器人技术与产业的对策建议 4
第二章 机器人伺服滑台机械系统设计 7
[资料来源:THINK58.com]
2.1机器人伺服滑台机械系统设计的关键参数 7
2.2机器人伺服滑台传动工作原理 7
2.3电机的选择 7
第三章 齿轮齿条传动设计 9
3.1 选取齿轮的材料、热处理及精度 9
3.2 初步设计齿轮传动的主要尺寸 9
3.3 按照齿根弯曲强度设计齿轮主要尺寸 12
3.4 几何尺寸计算 13
3.5 齿轮结构设计 14
第四章 直线滚动导轨的特点及选用 16
4.1直线滚动导轨的特点 16
4.2 直线滚动导轨的寿命 17
第五章 基于solidworks软件进行的建模及装配 21
5.1 solidworks软件建模与装配概述 21
5.2 运用SolidWorks软件进行零件设计 21
5.3运用SolidWorks软件进行零件装配 24
结论 26
参考文献 27
致谢 28
附 录 29
[来源:http://www.think58.com]