
3-DOF工业机器人的结构设计

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
3-DOF工业机器人的结构设计(含任务书,开题报告,论文说明书10000字,外文翻译,8张cad图纸)
摘要:在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所 认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,。工业机器人的技术水平和应用程度在一定程度上反映了一个国家 工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
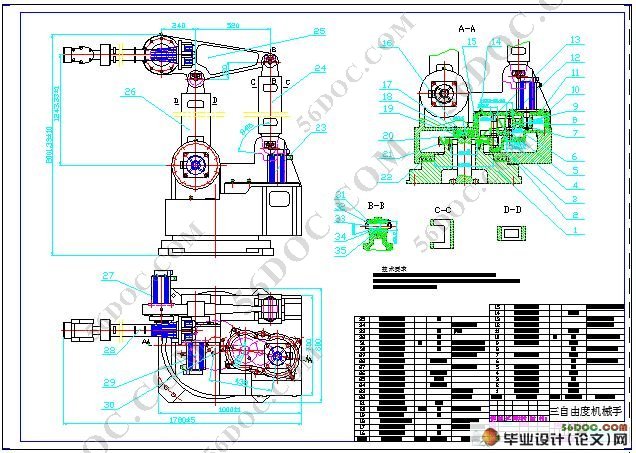
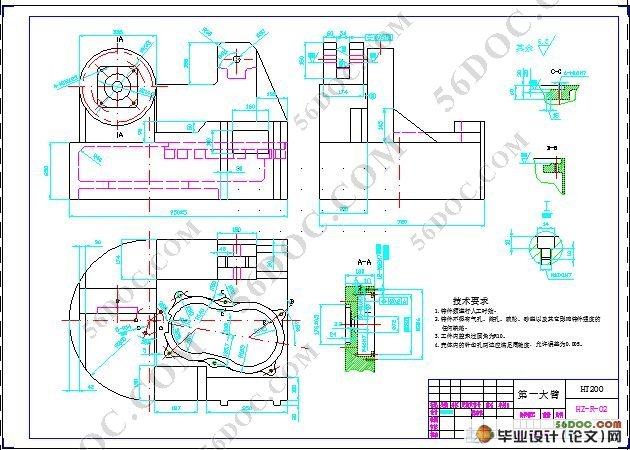
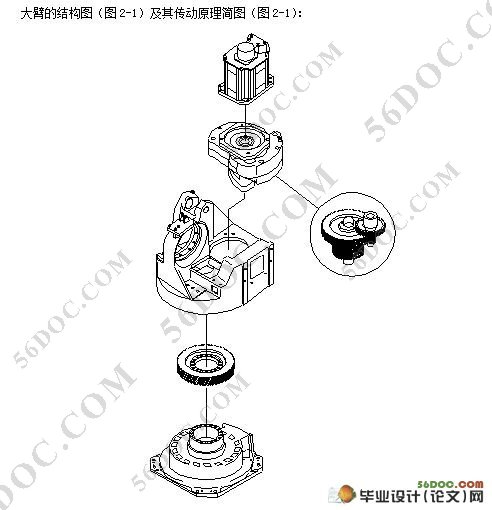
本设计介绍了关于工业机器人的一些基本常识和原理,包括工业机器人的组成、分类、主要技术性能参数和工业机器人的运动分析,并参考通用型工业六自由度机器 人的结构。根据对工业六自由度机器人的总体结构及传动系统的分析和探讨,进行三自由度工业机器人的结构设计。关键在于三轴(臂)的传动系统的设计以及整体 的结构设计,避免运动的干涉,在本次设计中主要负责第一臂与底座的结构设计及其传动原理,对第一臂与底座的各零部件的结构设计。
关键词:三自由度 机器人 传动原理 控制 [来源:http://think58.com]
3-DOF Structural Design of Industrial Robots
Abstract : In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way.
The Design of industrial robots on some basic common sense and principles, including the composition of industrial robots, classification, main technical performance parameters and the movement of industrial robots, with reference to general-purpose industrial 6-DOF robot's structure, conduct three degrees of freedom industrial robot structural design, based on the industry overall structure of six degrees of freedom robot and transmission system analysis and discussion of the 3-DOF industrial robot for structural design. The key lies in the fact that three axis (arm) transmission system design and the whole structure design, avoid the interference in the sports, mainly responsible for the design of the arm and base structure design and its transmission principle of first arm and the base of the parts of the structure design. [资料来源:http://THINK58.com]
Keywords: 3-DOF Robots Transmission principle Control
论文的主要内容:
在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机器人等。在本次设计是根据对工业六自由度机器人的总体结构及传动系统的分析 和探讨,进行三自由度工业机器人的结构设计。关键在于三轴(臂)的传动系统的设计以及整体的结构设计,避免运动的干涉。在本次设计中的要求,主要负责第一 臂与底座的结构设计。这次设计的机器人主要部位为第一轴与底座,设计一个第一轴转动角速度为90°/s,转角范围为0~270°。底座能够实现第一臂转角 (0~270°)转角范围控制的 3-DOF工业机器人。
第一步,查阅资料,工业机器人原理,了解工业机器人在国内的发展状况和生存问题。了解3-DOF工业机器人的特点以及在日常生产生活中的用途。根据其运用的场合不同,适当选择合适的方案,以达到实用、经济、可靠的目的。
第二步,在对所选课题有个初步的了解之后,在确定3-DOF工业机器人的结构设计内容。
第三步,机器人的总体方案设计,进行系统的方案的设计、比较与确定,依据对选择的传动方案,查阅相关参考文献,从而完成,第一、第二、第三轴的传动选择。设计好了之后,确定出总体的结构及整体方案。 [来源:http://www.think58.com]
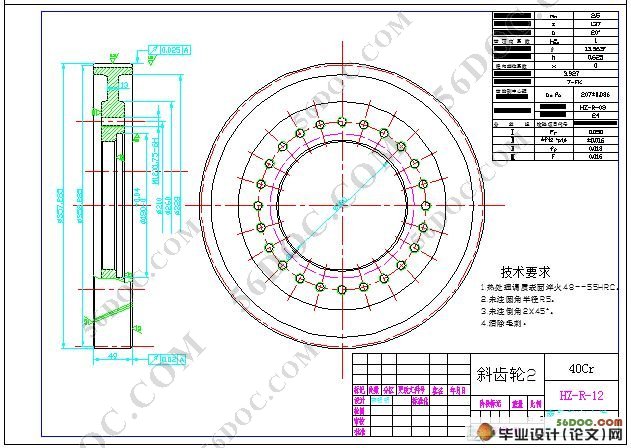
第四步,选择电动机,通过计算出第一轴上的转动惯量,选择合适的电动机,从而进行第一轴的传动结构的设计及计算。根据齿轮轴径值,查阅机械设计手册,选择底座的轴承。
第五步,根据方案,画出装配图,装配图画好后,从装配图中设计选择第一轴零部件以及完成对零部件图的初步绘制。
毕业设计(论文)使用的原始资料(数据)及设计技术要求:
根据对工业3自由度机器人的总体结构及传动系统的分析和探讨,按照下列
技术要求,基于Auto CAD软件完成机器人的结构设计。主要设计要求如下:
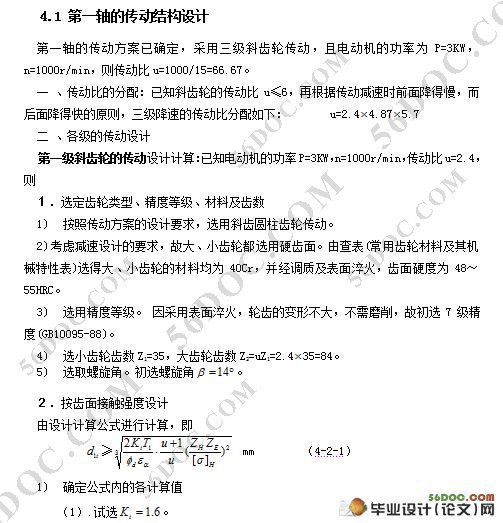
第一轴:转动角速度为 90 /s,转角范围为0~270
底 座:能够实现第一臂转角(0~270 )转角范围控制
[资料来源:http://THINK58.com]
[来源:http://www.think58.com]
上一篇:液压挖掘机行走装置设计
下一篇:自定中心振动筛设计