
车床上料机械手结构设计☆

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
摘 要
本课题是为普通车床配套而设计的上料机械手。工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对现实工业生产自动化,推动工业生产的进一步发展起着重要的作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻了工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频率、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更现实其优越性,有着广泛的发展前途。
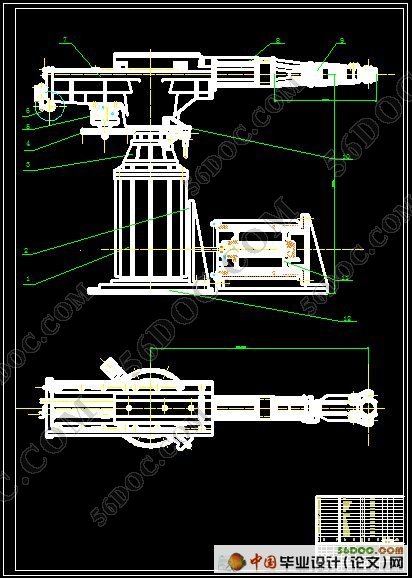
本课题通过应用autocAD技术对机械手进行总体方案设计和液压传动原理设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持手部结构,设计了机械手的手腕结构,设计了机械手的手臂结构。他能实际自动上料运动,上料机械手的运动速度是按着满足生产率的要求来设定。
关键词:机械手;手部设计;结构设计;
Abstract
This topic is designed for ordinary lathe supporting the feeding manipulator. Industrial manipulator is the inevitable outcome of the industrial production, it is a kind of imitation upper part of the body, according to the predetermined requirement function of conveying work-piece or operated holding tools to reality technical equipment, automation, promote industrial production automation of the further development of industrial production plays an important role. Thus has strong vitality wide attention by the people and welcome. Practice has proved, industrial robots can replace the hands of heavy labor, significantly reduce the labor intensity of the workers, improve working conditions, and improve labor productivity and automation level. Industrial production in the bulky workpiece often appear handling and long-term frequency, drab operation, using manipulator is effective. In addition, it can be in high temperature, low temperature and deep water, the universe, radioactive and other toxic, environmental pollution condition of operation, the more realistic its superiority, has wide development prospect 〖资料来源:毕业设计(论文)网 WWW.56DOC.COM〗
[资料来源:THINK58.com]
This topic through the application of manipulator in overall autocAD technology design and hydraulic transmission principle design of manipulator, sure, and freedom coordinates determined the technical parameters of manipulator. Meanwhile, the design of clamping manipulator hand structure, design of manipulator wrist structure, design of manipulator arm structure. He can actual automatic feeding movement of the manipulator, feeding velocity according to satisfy the requirement is set to productivity.
KeyWords:manipulator;handing structure ;structure design
课题内容和设计要求
(一)原始数据及资料
(1)原始数据:
A.生产纲领:100000件
B.自由度(四个自由度)
臂转动180º
臂上下运动600mm
臂伸长(收缩)500mm
手部转动90º
(2)设计要求:
a、上料机械手结构设计图、装配图、各主要零件图(一套)
b、设计计算说明书(一份)
(3)技术要求
主要参数的确定:
a、坐标形式:直角坐标系 〖资料来源:毕业设计(论文)网 5 6 D O C.C O M〗
b、臂的运动行程:伸缩运动500mm,回转运动180º。
c、运动速度:使生产率满足生产纲领的要求即可。
d、控制方式:起止设定位置。
e、定位精度:±3mm。
f、手指握力:60kg
g、驱动方式:液压驱动。
〖资料来源:毕业设计(论文)网 http://www.56doc.com〗
[资料来源:http://think58.com]
〖资料来源:毕业设计(论文)网 WWW.56DOC.COM〗


目 录 33000字
摘 要 I
Abstract II
1 绪论 1
1.1 工业机械手概述 1
1.1.1 机械手的应用性 2
1.1.2机械手先进性 3
1.1.3国内外研究现状和趋势 3
1.2设计目的 5
1.3课题内容和设计要求 5
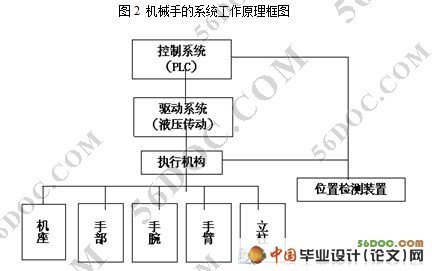
1.4 机械手的系统工作原理及组成 7
2 机械手整体设计方案论证 10
2.1 机械手的整体设计 10
〖资料来源:56DOC.COM 毕业设计(论文)网〗 [资料来源:www.THINK58.com]
2.1.1 机械手总体结构类型 10
2.1.2机械手的坐标形式与自由度 11
2.1.3设计具体采用方案 12
2.2机械手腰座结构设计 13
2.2.1机械手腰座结构设计要求 13
2.2.2设计具体采用方案 14
2.3机械手手臂结构的设计 15
2.3.1机械手手臂设计要求 15
2.3.2设计具体采用方案 16
2.4机械手腕部的结构设计 16
2.4.1机器人手腕结构的设计要求 16
2.4.2设计具体采用方案 17
2.5机械手末端执行器(手爪)的结构设计 18
2.5.1机械手末端执行器的设计要求 18
2.5.2机器人夹持器的运动和驱动方式 19
2.5.3机器人夹持器的典型结构 19
2.5.4设计具体采用方案 20
2.6机械手的机械传动机构的设计 20
2.6.1工业机器人传动机构设计应注意的问题 20 〖资料来源:毕业设计(论文)网 http://www.56doc.com〗
2.6.2工业机器人常用的传动机构形式 21
2.6.3设计具体采用方案 24
2.7机械手驱动系统的设计 25
2.7.1机器人各类驱动系统的特点 25
2.7.2工业机器人驱动系统的选择原则 25
2.7.3机器人液压驱动系统 26
2.7.4机器人气动驱动系统 27
2.7.5机器人电动驱动系统 29
2.7.6设计具体采用方案 31
2.8机器人手臂的平衡机构设计 31
2.8.1机器人平衡机构的形式 31
2.8.2设计具体采用的方案 32
2.9机械手的主要技术参数 32
3 机械手设计计算 34
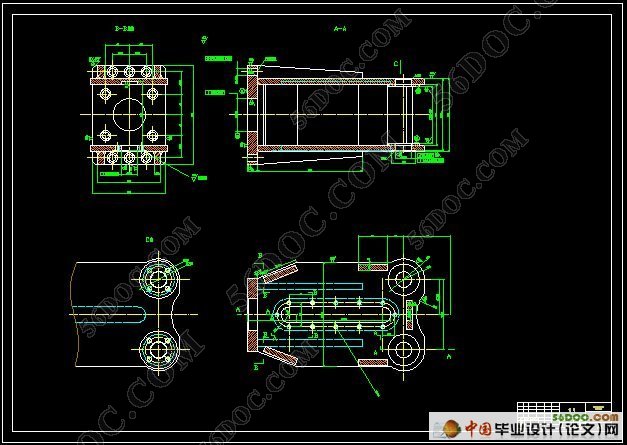
3.1 夹持式手抓的设计计算 34
3.1.1 手抓部力的计算 34
3.1.2手部加紧油缸的确定 35
3.2腕部设计 35
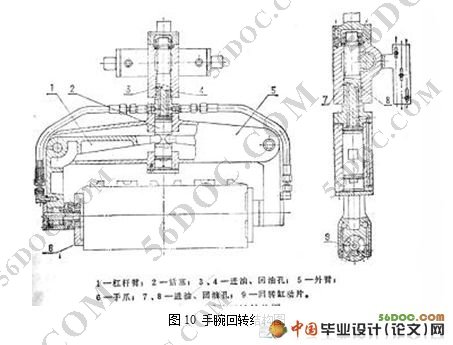
3.2.1腕部的设计要求: 35
3.2.2腕部的结构: 36 〖资料来源:毕业设计(论文)网 WWW.56DOC.COM〗 [资料来源:http://THINK58.com]
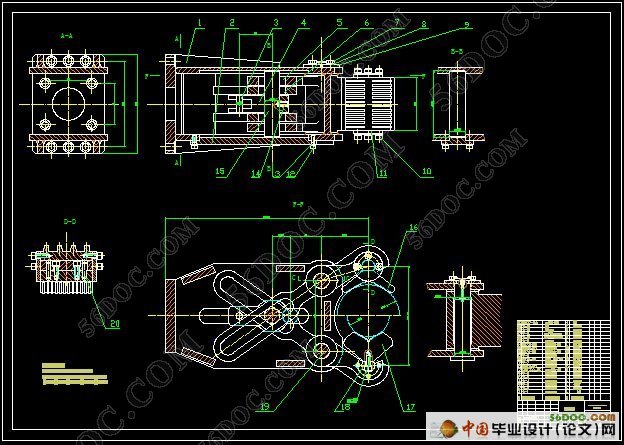
3.3臂部设计 40
3.3.2臂部结构 45
3.3.3臂部伸缩运动结构 45
3.3.4臂部伸缩油缸的计算 47
3.3.5 臂部回转运动 49
3.3.6臂部升降运动 50
3.3.7臂部升降油缸的计算 51
4 机械手的其他部分装置 54
4.1 缓冲定位装置 54
5 机械手总体方案总结 56
5.1 传动方案的确定 56
5.2 规格参数 56
5.3结构特点 56
6 毕业设计感想 59
参考文献 60
致 谢 61 〖资料来源:毕业设计(论文)网 www.56doc.com〗 [资料来源:THINK58.com]
[资料来源:http://THINK58.com]
上一篇:冲床上料机械手的设计
下一篇:车床上下料机械手的设计