
工业机器人夹具设计及其3D打印实现(含CAD图,inventor三维模型)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
工业机器人夹具设计及其3D打印实现(含CAD图,inventor三维模型)(任务书,开题报告,外文翻译,论文说明书12300字,CAD图12张,inventor三维模型)
摘要
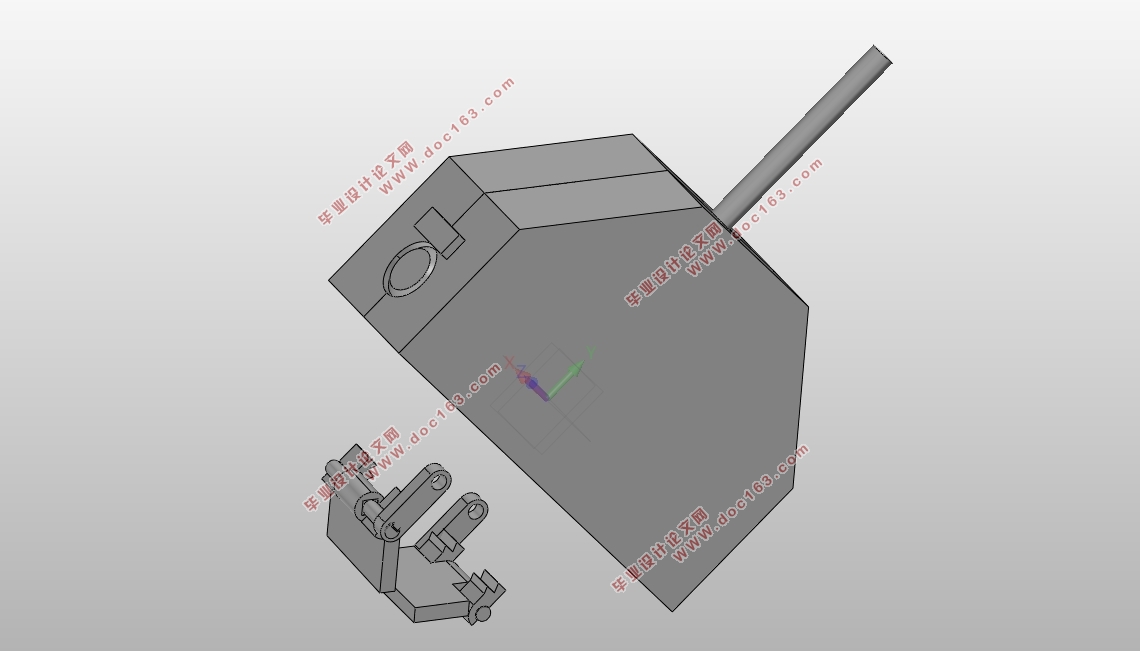
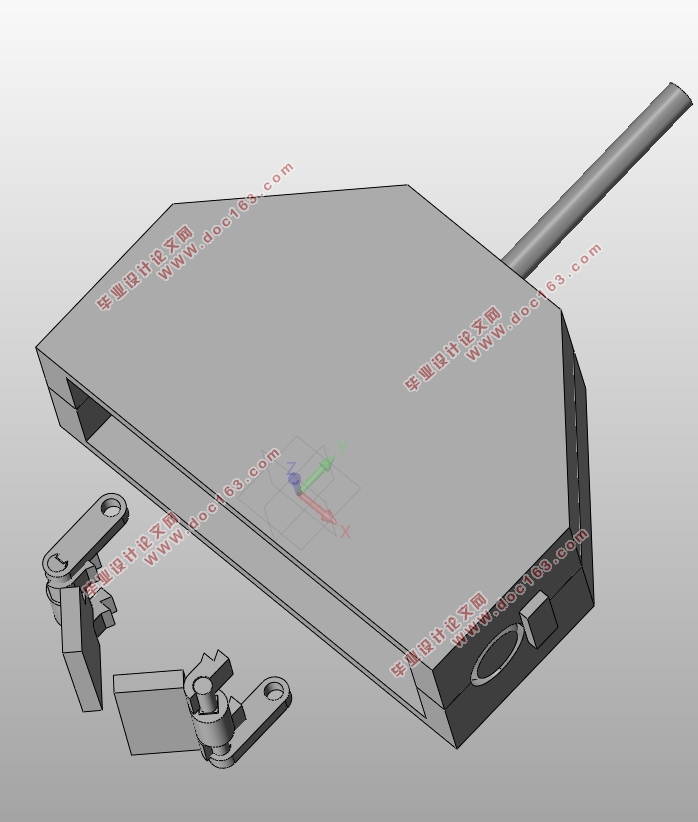
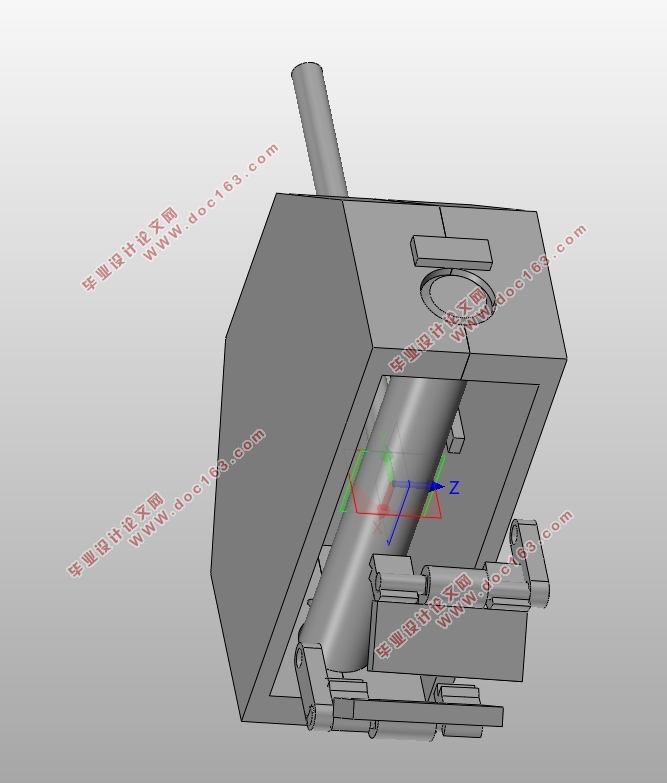
随着3D打印技术的不断发展,其成型简便,设计多样,材料节省等优点使其逐步成为一种新兴的快速成型技术,并广泛应用于各类产品的设计和生产之中,对各行业,尤其是传统制造业带来了巨大的冲击。工业机器人夹具作为工业生产过程中不可或缺的一部分,需要保证其应用性、安全性和功能性等要求,针对于不同的夹持对象,夹具的设计要求也随之发生改变。本文主要运用3D打印技术,从多功能夹持的角度出发,设计可针对于多种对象的工业机器人夹具,针对其中一款,采用桌面级FDM打印机打印出模拟成品零件,并组装成型,以手动驱动模拟原动件驱动,完成夹具对各类夹持对象的工作状态的模拟。其余几款采用inventor建模后进行电脑模拟及仿真动画制作的方式进行演示。
关键词:3D打印 机器人夹具 夹具设计
Abstract
With the continuous development of 3D printing technology, its advantages such as simple molding, diverse design and material saving make it gradually become a new rapid prototyping technology, and widely used in the design and production of various products, which has brought a huge impact on various industries, especially the traditional manufacturing industry. As an indispensable part of industrial production process, the fixture of industrial robot needs to ensure its applicability, safety and functionality, etc. For different clamping objects, the design requirements of fixture also change accordingly. Using 3d printing technology, from the perspective of multi-function clamping, design object for a variety of industrial robots clamp, for one, the FDM printer to print out the desktop level simulation finished parts, and assembly molding, to simulate the moving parts driven manually, complete jig for the simulation of all kinds of clamping the working state of the object. The rest are demonstrated by means of computer simulation and simulation animation after inventor modeling.
[版权所有:http://think58.com]
Keywords: 3D printing Robot fixture Fixture design
[版权所有:http://think58.com]

 [资料来源:http://www.THINK58.com]
[资料来源:http://www.THINK58.com] 
目录
诚信声明 Ⅰ
摘要 Ⅱ
Abstract Ⅲ
第一章 前言 1
1.1论文背景 1
1.1.1国内外3D打印技术的发展及现状 1
1.1.2国内外机器人夹具的发展及现状 1
1.2本论文的主要工作及研究内容 3
第二章 机器人夹具的结构设计 5
2.1机器人夹具的设计理念 5
2.1.1机器人夹具的设计要求 5
2.1.2 3D打印技术的设计原则 7
2.2机器人夹具的主体设计 7
2.2.1机器人夹具的水平移动设计 7
2.2.2机器人夹具的模块化夹持板设计 10
2.2.3机器人夹具的其余各部件设计 14
2.3机器人夹具的夹持量程 16
2.2.1机器人夹具夹持长方体件量程 16
2.2.2机器人夹具夹持圆柱件量程 17
第三章 机器人夹具的强度分析 19
3.1机器人夹具夹持板强度分析 19
3.1.1机器人夹具夹持长方体件时的强度分析 19
3.1.2机器人夹具夹持圆柱件时强度分析 22
3.2机器人夹具的材质选择 27
第四章 总结与展望 28
4.1全文总结 28
4.2不足与展望 28
参考文献 29
致谢 30 [版权所有:http://think58.com]
上一篇:发动机连杆加工工艺与夹具设计(含CAD零件图装配图,PROE三维图)
下一篇:ATV等速驱动半轴中间轴加工工艺及其夹具设计(含CAD夹具装配图)