
智能小车设计(电路图+程序+PCB图+cad图纸)☆

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
智能小车设计(任务书+毕业设计论文23000字+电路图+程序+pcb图+cac图纸)
摘 要
智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。电动智能小车就是其中的一个体现。80C51单片机是一款八位单片机,它的易用性和多功能性受到了广大使用者的好评。这里介绍的是如何用80C51单片机来实现毕业设计,该设计是自行拟定的设计类课题。本系统采用80C51单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹功能,整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
采用的技术主要有:
(1) 通过编程来控制小车的速度;
(2) 传感器的有效应用;
(3) 新型显示芯片的采用.
关键词 80C51单片机 ;光电检测器 ;PWM调速 ;电动小车
Abstract
The intelligence is modern new invention, is a later development direction, he can according to in advance enactment of the mode is automatic the operation in an environment, don't need an artificial management, can be applied to science to investigate the use of exploring the etc..The dynamoelectric intelligence car is among them of an individual is now.80C51 is a 8 bit single chip computer.Its easily using and multi-function suffer large users.This article introduces the CUMT graduation design with muself .This system regards the request of the topic,adopting 80C51 for controlling core,super sonic sensor for test the hinder.It can run in a high and a low speed or stop automatically.It also can record the time,distance and the speed or searching mark automatically the electeic circuit consteuction of whole system is simple,the function is dependable.Experiment test result satisfy the request,this text emphasizes introduced the hardware system designs and the result analyze. 〖资料来源:56DOC.COM 毕业设计(论文)网〗 [资料来源:THINK58.com]
The adoption of techniqueas
(1) Reduce the speed by program the engine;
(2) Efficient application of the sensor;
(3) The adoption of the new display chip.
KEYWORDS : 80C51 SINGLE CHIP COMPUTER ;LIGHT ELECTRICITY DETECTOR ;PWM SPEED ADJUSTING ;ELECTRICITY MOTIVE SMALL CAR
毕业设计主要内容和要求:
(1) 收集目前现有的智能小车的有关图纸和资料
(2)确定智能小车的技术指标,并确定实施方案
(3)整个装置系统的原理设计、线路板设计和外壳部分设计
(4) 要求装置系统具有80C51单片机 ;光电检测器 ;PWM调速 ;电动小车
(5) 整个装置系统的程序设计和调试
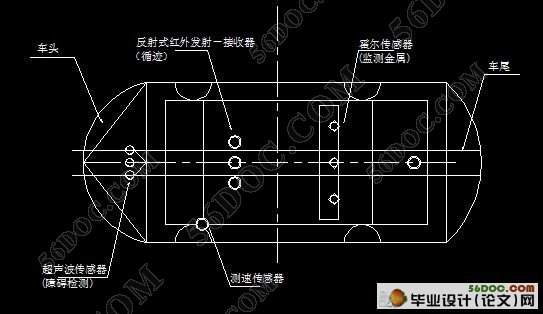
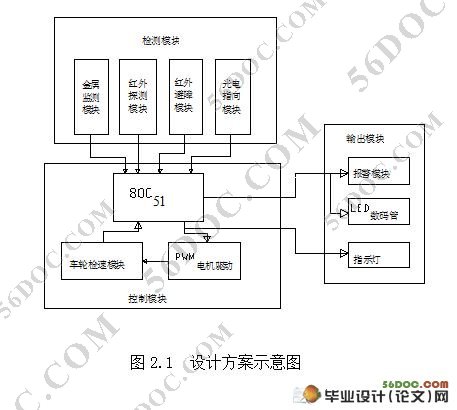
(6) 采用80C51单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹功能,整个系统的电路结构简单,可靠性能高。
本设计采用的是80C51单片机,这主要是因为该单片机的稳定性比较好。采用80C51单片机为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹功能,整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。还可以采用其它系列的单片机。 〖资料来源:毕业设计(论文)网 5 6 D O C.C O M〗
[来源:http://www.think58.com]
在三个月的毕业设计过程中,我不仅温故了四年来大学的很多专业课程,而且不断的接触新领域,拓展了视野同时也了解到自身的许多不足之处。我认为自己在这个过程里所获得的最大的收获是对信息的搜索以及快速学习的能力的提高,这将是我人生里的一笔抹不去的财富,感谢在此过程中给予我极大帮助的王禹桥老师,以及我的可爱的同学们。
〖资料来源:毕业设计(论文)网 http://www.56doc.com〗
〖资料来源:毕业设计(论文)网 http://www.56doc.com〗
目 录
第1章 前言 1
第2章 方案设计与论证 3
第2.1节 运动方式的选择与论证 3
第2.2节 电机驱动调试方案论证 4
第2.3节 路面探测方案论证 4
第2.4节 障碍物探测模块 5
第3.5节 寻光定向模块 6
第2.6节 车轮检速及路程计算模块 6
第2.7节 供电电源选择 7
第2.8节 方案论证总结 7
第3章 硬件设计 9
第3.1节 80C51单片机硬件结构 9
第3.2节 电动机PWM驱动模块的电路设计 13
第3.3节 路面黑线探测模块设计 18
第3.4节 障碍物探测模块 20
第3.5节 传感器检测电路金属 23
第3.6节 寻光定向模块 24
第3.7节 显示电路设计 26 〖毕业设计(论文)咨询QQ:306826066〗
第3.8节 报警模块 29
第3.9节 行车距离检测 29
第4章 软件设计 32
第4.1节 主程序设计 32
第4.2节 显示子程序设计 37
第4.3节 壁障子程序设计 38
第4.4节 软件抗干扰技术 41
第4.5节 有关于“看门狗”技术 44
第4.6节 可编程逻辑器件 47
第5章 测试数据、测试结果分析及结论 48
总 结 49
附录1 总体程序 51
致 谢 71
〖资料来源:毕业设计(论文)网 www.56doc.com〗
[资料来源:http://THINK58.com]