
基于STM32的无线视频传输智能侦察小车设计
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于STM32的无线视频传输智能侦察小车设计(论文13000字)
摘要:无线视频传输智能侦察小车作为现代的新发明,可以代替人类在不同的条件下工作,是如今我国重点发展的一个方向。本文介绍了这种小车的系统设计过程。文中的智能小车的中央控制芯片采用STM32。避障方法为超声波测距法,这种测距法是利用传感器发射超声波信号来采集障碍物的距离信息,并将该信息传递给控制芯片,由其控制小车的壁障。定位采用北斗导航系统。视频传输及小车遥控可由Wi-Fi模块实现。经过实验测试表明,该系统具备上述功能。
关键词:避障;遥控;超声波测距;视频传输;北斗定位
Design of Wireless Video Transmission Intelligent Reconnaissance Car Based on STM32
Abstract:As a new modern invention, wireless video transmission intelligent reconnaissance trolley can replace human beings under different conditions, which is a key development direction of China today. This paper describes the system design process for this car. The central control chip of the smart car in this article uses STM32VET6. The obstacle avoidance method is the ultrasonic ranging method, which uses the sensor to transmit ultrasonic signals to collect the distance information of the obstacle, and transmits the information to the control chip, which controls the barrier of the trolley. The positioning uses the Beidou navigation system. Video transmission and trolley remote control can be implemented by Wi-Fi module. Experimental tests have shown that the system has the above functions. [资料来源:www.THINK58.com]
Key words:Obstacle avoidance; remote control; ultrasonic ranging; video transmission; Beidou positioning
目 录
1 绪论 1
1.1研究背景 1
1.2研究目的和意义 1
1.3智能车辆的国内外研究现状 2
1.3.1 国外研究现状 2
1.3.2 国内研究现状 2
1.4 本课题的研究内容 2
1.5 论文的研究内容 3
2 无线视频传输智能侦察小车方案设计 4
2.1探测方案设计 4
2.2驱动方案设计 4
2.3遥控模块设计 4
2.4定位方案设计 5
2.5 图传方案设计 5
2.5.1 模拟无线视频传输技术 5
2.5.2 数字无线视频传输技术 5
2.6控制方案设计 6 [资料来源:http://THINK58.com]
2.7电源方案设计 6
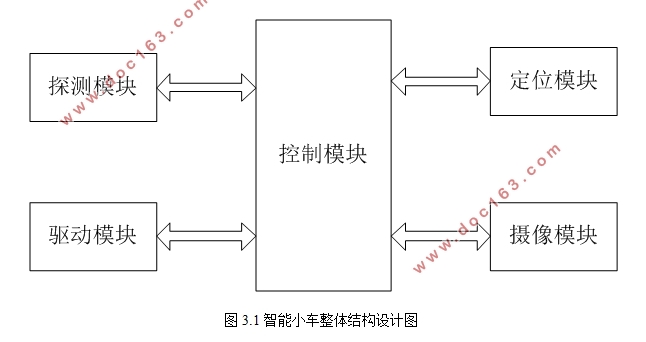
2.8系统最终方案设计 6
3 无线视频传输智能侦察小车硬件设计 7
3.1 控制模块设计 7
3.2 避障模块设计 7
3.2.1 避障原理 7
3.2.2 超声波测距模块 8
3.3 驱动模块设计 8
3.3.1 L298N 8
3.3.2 PWM波调速原理 9
3.4舵机的方向控制设计 9
3.5 Wi-Fi模块设计 10
3.6 定位模块设计 11
3.6.1 北斗系统定位原理 11
3.6.2定位模块选择 12
3.6.3北斗模块测试配置软件 13
3.7 摄像模块设计 13
3.8电源模块设计 14
4 无线视频传输智能侦察小车软件设计 14
4.1 STM32开发环境介绍 14
4.2 控制设计 15
4.3 探测设计 16 [来源:http://think58.com]
4.3.1 避障流程设计 16
4.3.1测距流程设计 17
4.4 遥控设计 18
4.4.1 遥控部分主流程设计 18
4.4.2 小车部分流程设计 19
5 系统调试及测试 21
5.1系统实验调试 21
5.2电路调试 21
5.3系统测试 21
5.3.1 小车避障测试 21
5.3.2小车遥控测试 22
5.3.3 小车定位系统测试 22
5.3.4 小车图像传输测试 22
6 总结与展望 23
6.1 总结 23
6.2展望 23
参考文献 24
致谢 25