
基与PLC三自由度机械手控制系统的设计与实现(含CAD零件装配图)

以下是资料介绍,如需要完整的请充值下载.
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
资料介绍:
基与PLC三自由度机械手控制系统的设计与实现(含CAD零件装配图)(论文说明书16000字,CAD图纸11张)
中文摘要
本文简要介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
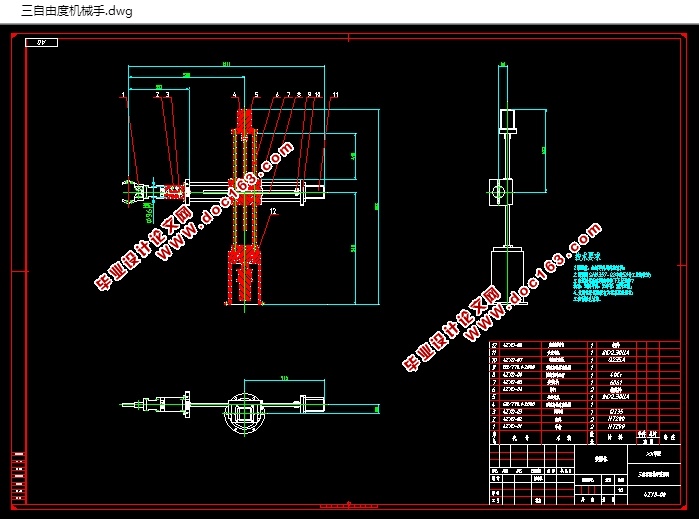
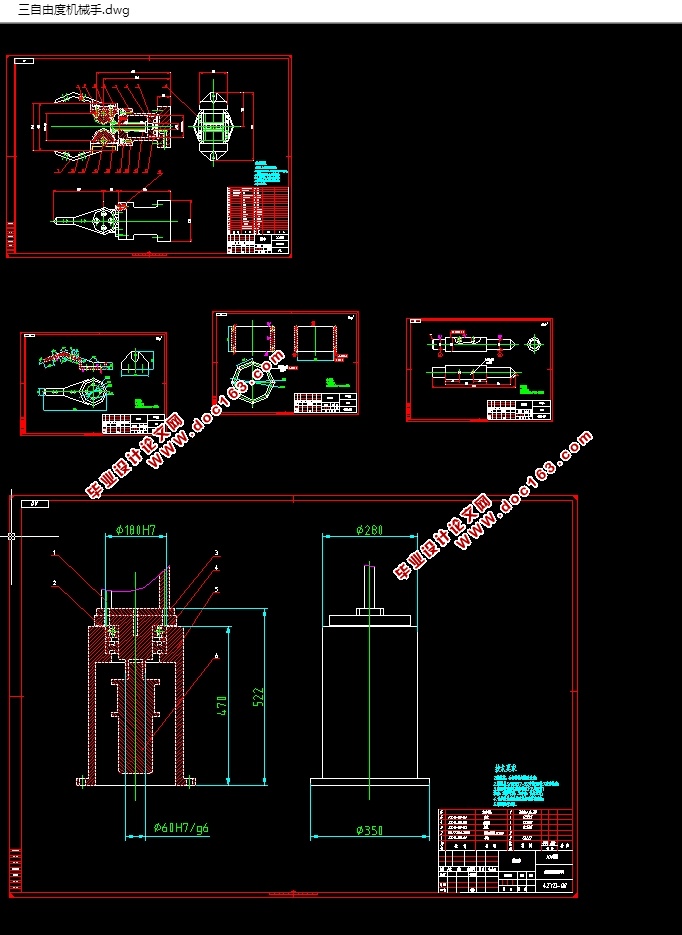
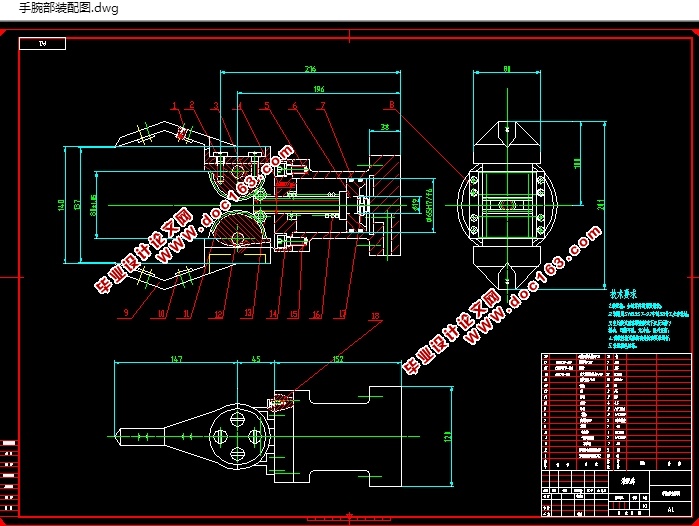
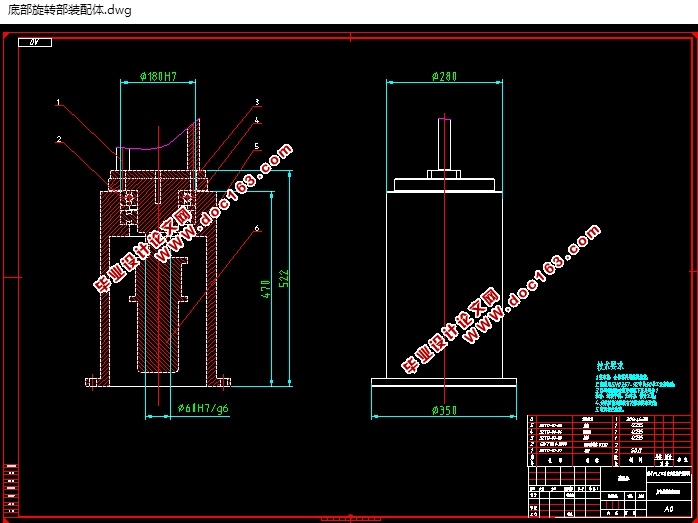
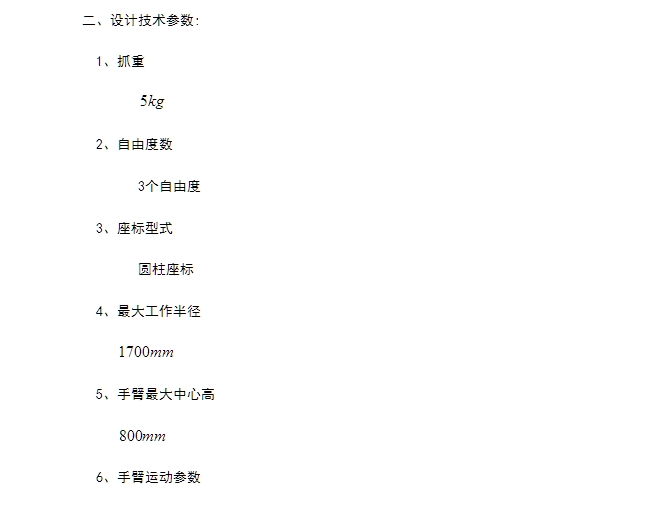
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
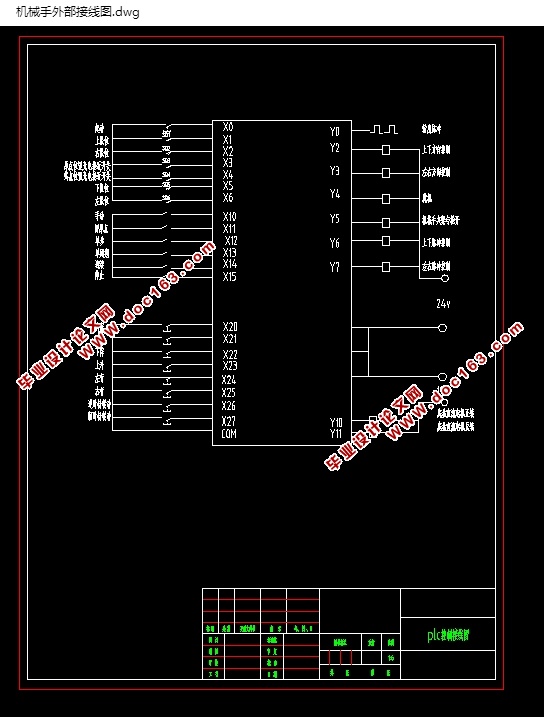
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
关键词 工业机器人,机械手,气动,可编程序控制器(PLC)
[资料来源:THINK58.com]
[资料来源:http://www.THINK58.com]
目录1
文摘3
Abstract3
第一章 绪论4
11机械手概述4
12机械手的组成和分类4
121机械手的组成5
122机械手的分类……………………………………………6
13国内外发展状况 7
14课题的提出及主要任务………………………………………………8
[版权所有:http://think58.com]
141课题的提出……………………………………………8
142课题的主要任务……………………………………………9
第二章 机械手的设计方案……………………………………………9
21机械手的座标型式与自由度………………………………………10
22机械手的手部结构方案设计………………………………………11
23机械手的手腕结构方案设计………………………………………13
24机械手的手臂结构方案设计………………………………………14 [来源:http://www.think58.com]
25机械手的驱动方案设计……………………………………………15
26机械手的控制方案设计……………………………………………17
27机械手的主要参数…………………………………………………18
28机械手的技术参数列表……………………………………………19
第三章 手部结构设计……………………………………………20
31夹持式手部结构……………………………………………………21
[资料来源:http://www.THINK58.com]
311手指的形状和分类…………………………………………22
312设计时考虑的几个问题……………………………………23
313手部夹紧气缸的设计………………………………………24
第四章 手腕结构设计…………………………………………………26
41手腕的自由度………………………………………………………28
42手腕的驱动力矩的计算……………………………………………29
[资料来源:http://think58.com]
421手腕转动时所需的驱动力矩…………………………………29
422回转气缸的驱动力矩计算……………………………………30
423回转气缸的驱动力矩计算校核………………………33
第五章 手臂伸缩,升降,回转气缸的设计与校核………………………33
51手臂伸缩部分尺寸设计与校核……………………………………34
511尺寸设计……………………………………………35
512尺寸校核……………………………………………35
[来源:http://think58.com]
5 1 3导向装置……………………………………………36
5 1 4平衡装置……………………………………………37
52手臂升降部分尺寸设计与校核………………………………37
521尺寸设计……………………………………………37
522尺寸校核……………………………………………37
53手臂回转部分尺寸设计与校核……………………………………38
531尺寸设计……………………………………………39
[来源:http://think58.com]
532尺寸校核……………………………………………40
第六章 气动系统设计……………………………………………41
61气压传动系统工作原理图…………………………………………42
62气压传动系统工作原理图的参数化绘制…………………………43
第七章 机械手的PLC控制设计……………………………………………44
71可编程序控制器的选择及工作过程………………………………45
711可编程序控制器的选择………………………………………46 [来源:http://think58.com]
712可编程序控制器的工作过程…………………………………47
72可编程序控制器的使用步骤………………………………………48
73机械手可编程序控制器控制方案…………………………………49
结论…………………………………………………………………50
致谢……………………………………………………………………………51
参考文献…………………………………………………………………………52 [版权所有:http://think58.com]