
自动驾驶纯电动公交车WG6820AI总体设计(含CAD图,CATIA三维图)英文版

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
自动驾驶纯电动公交车WG6820AI总体设计(含CAD图,CATIA三维图)英文版(任务书,开题报告英文,文献摘要,论文说明书英文8200字,CAD图5张,CATIA三维图1张)
General Design of Autonomous intelligent pure electric bus WG6820AI
摘要
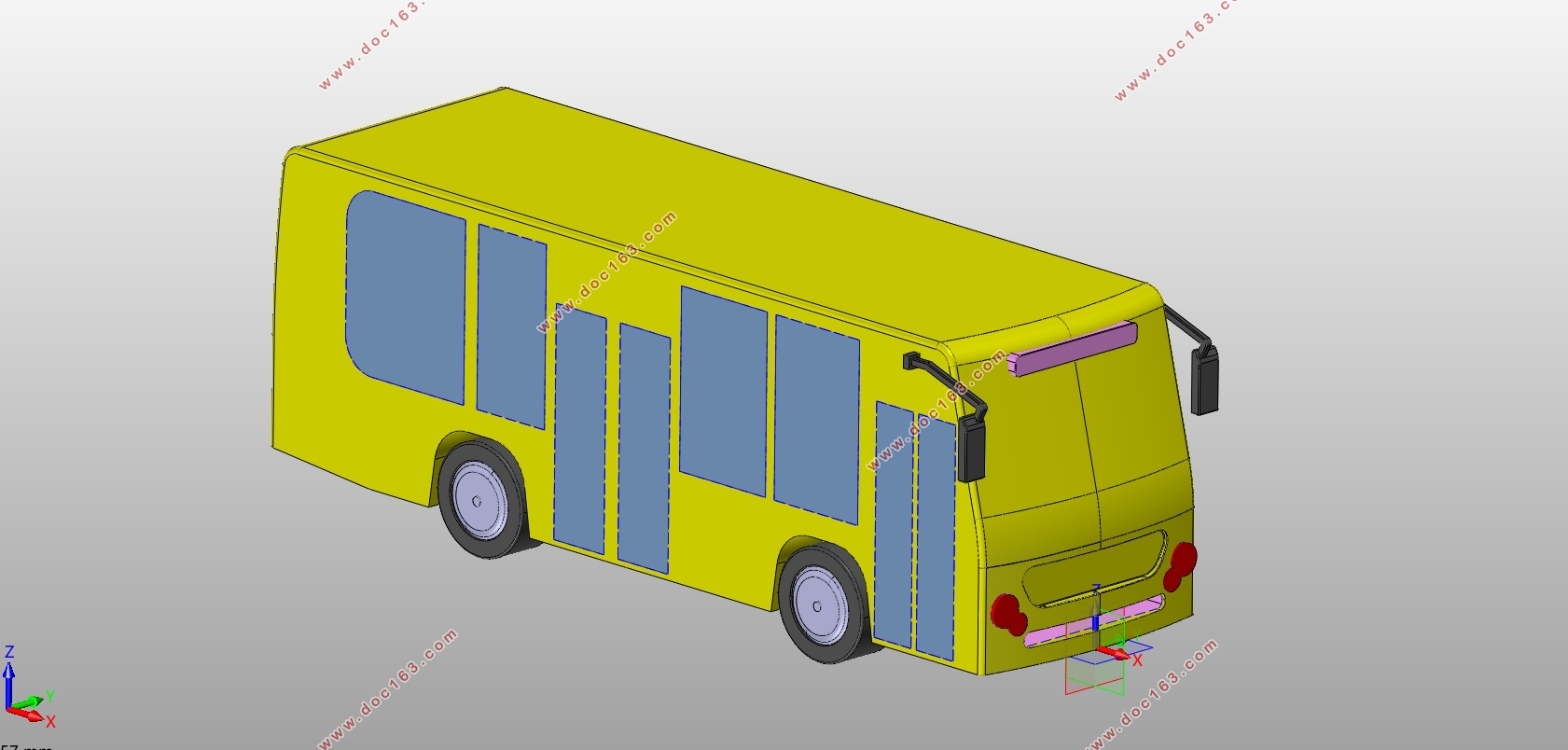
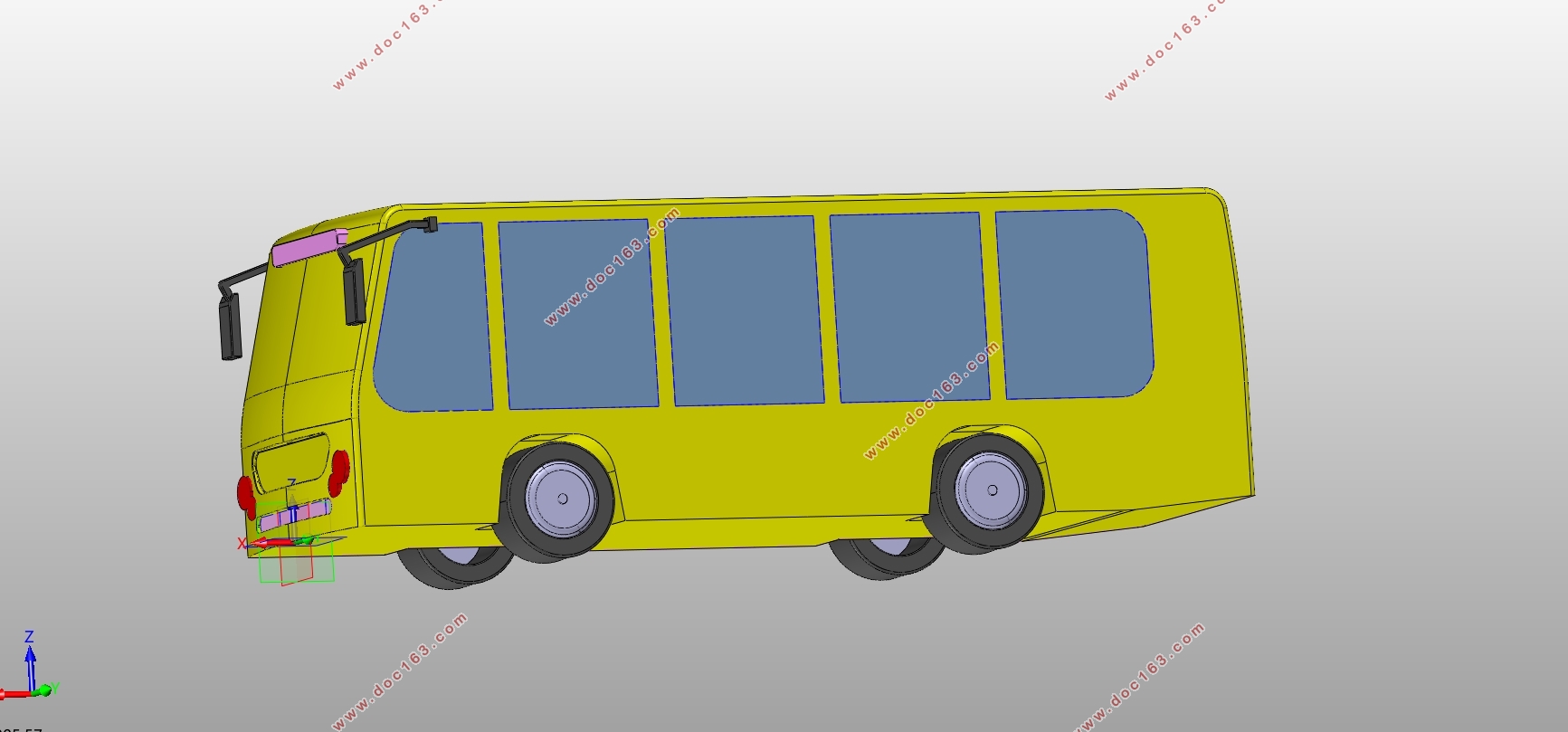
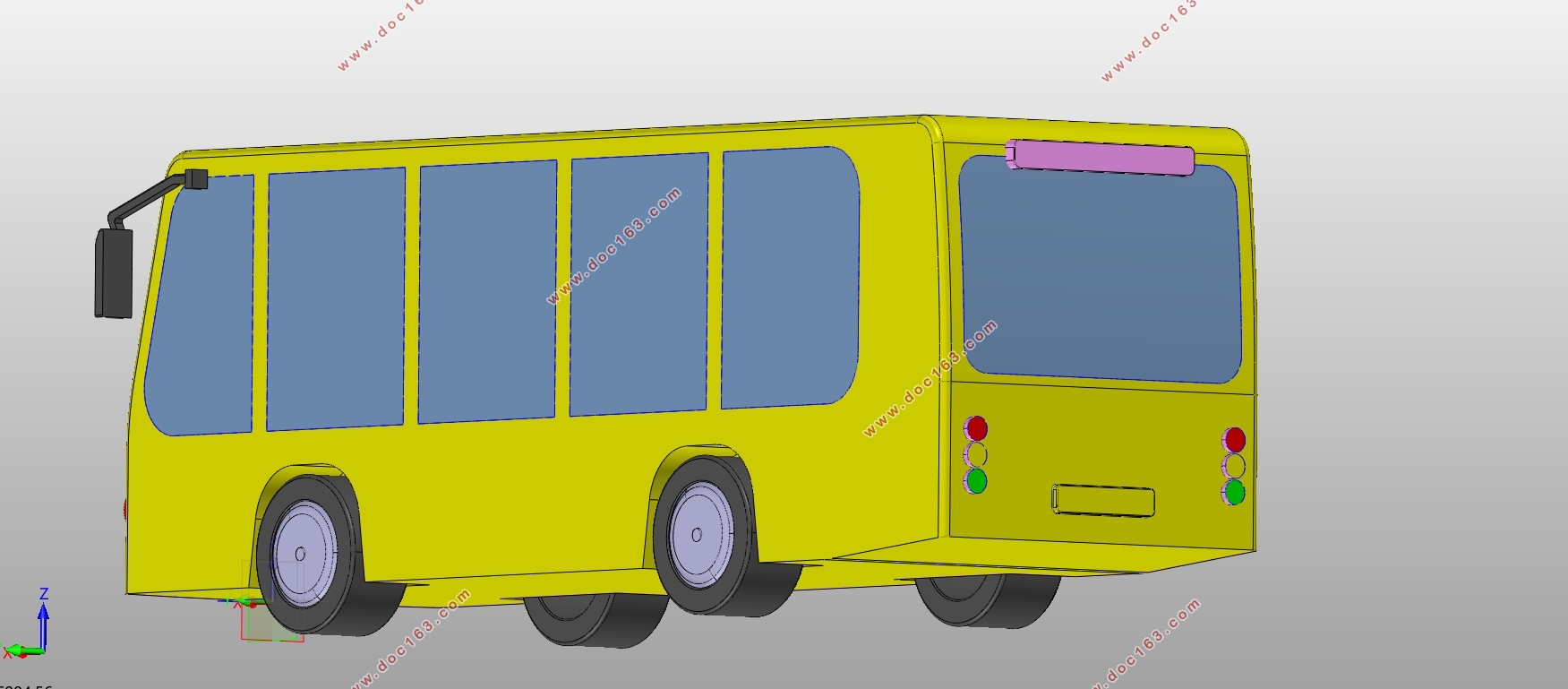
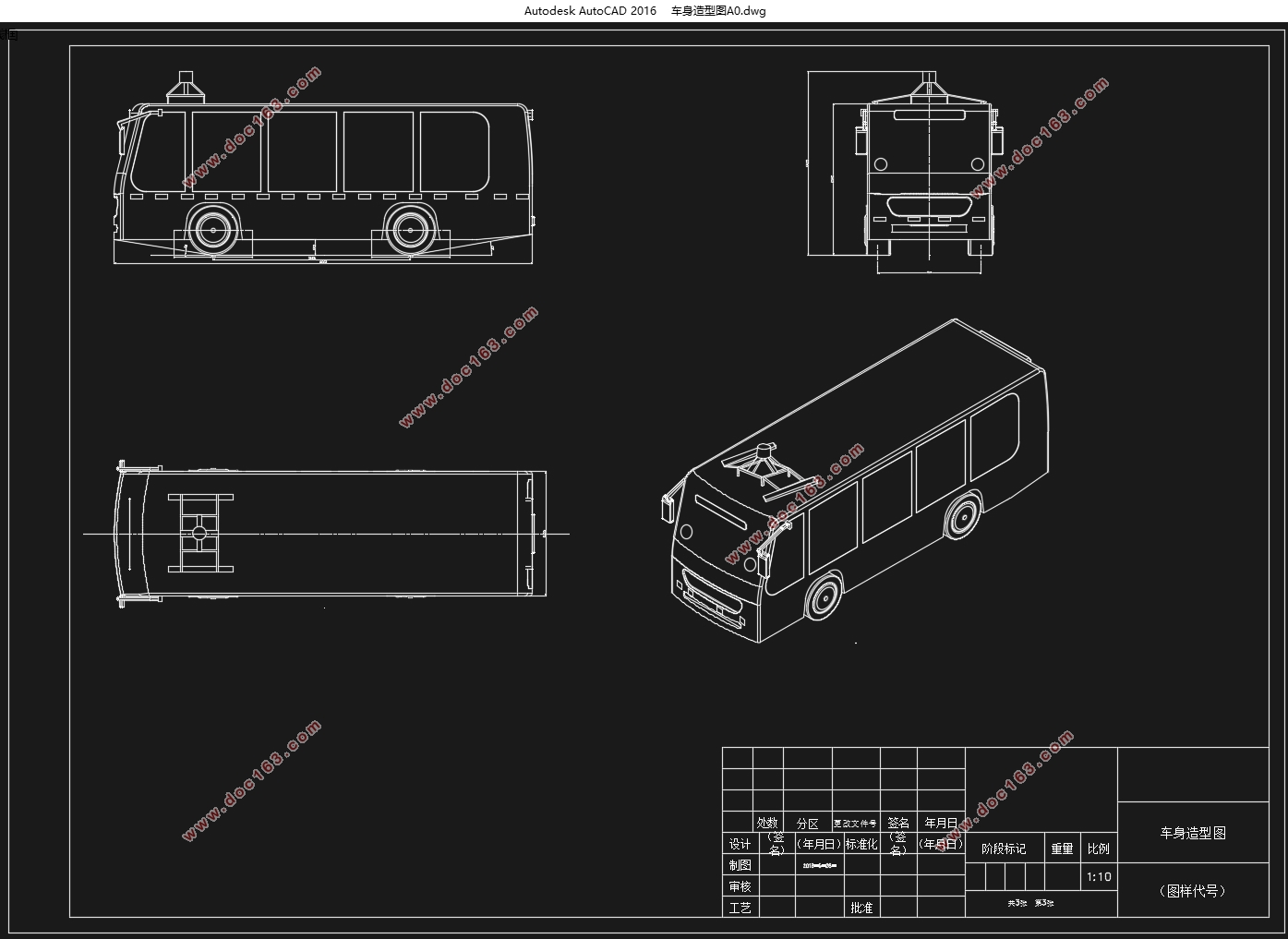
本文写的是一辆无人驾驶纯电动公交车的总体设计,该客车车长8.2米。
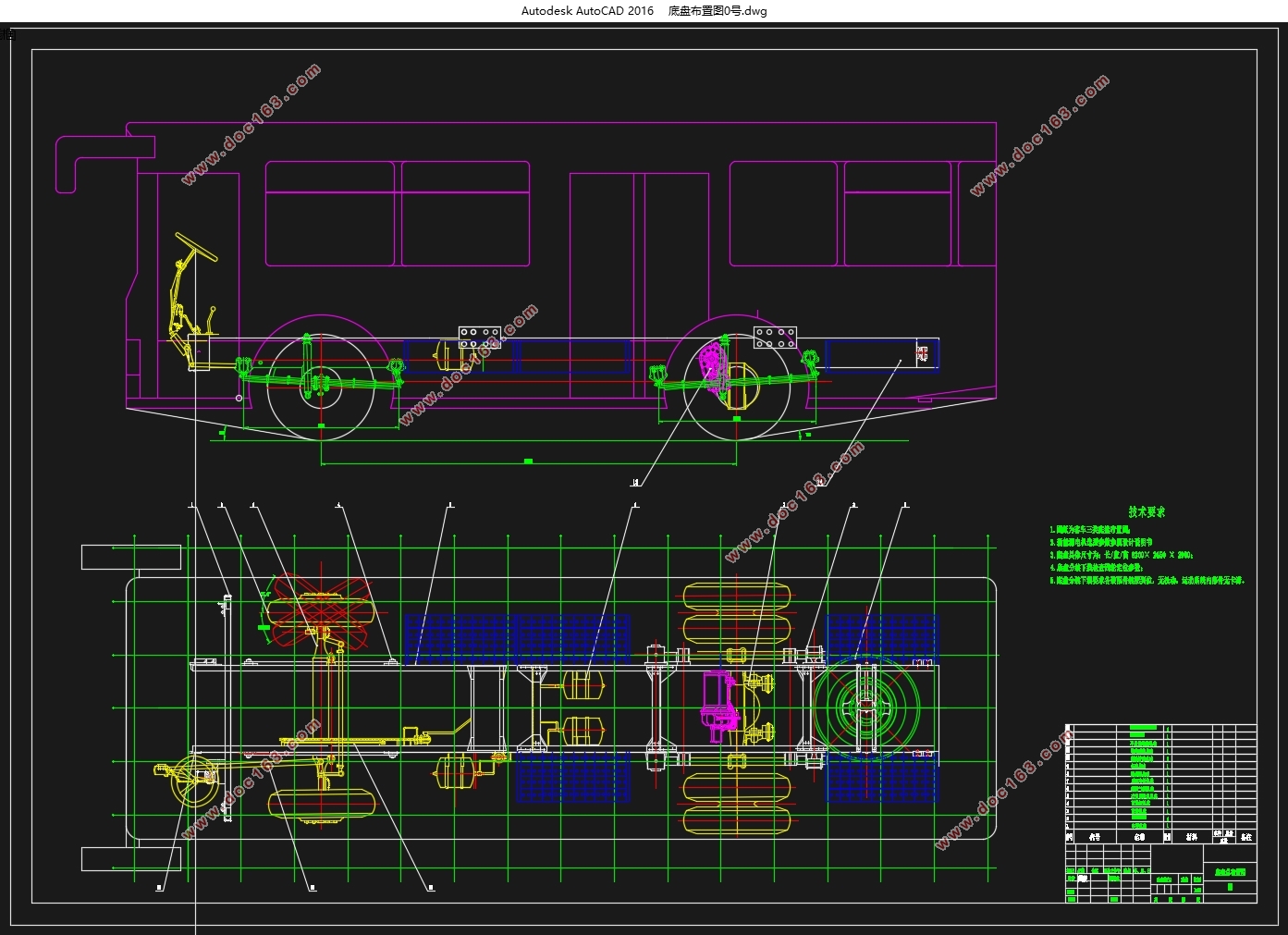
通过查阅大量的文献,然后从驱动电机的选择,电池的选择着手,根据设计要求,计算最后得出满足行驶要求的电机和电池。在选好电机和电池后,与燃油汽车不同,综合电动汽车的结构设计需要对汽车的传动系统,转向系统,制动系统进行一一分析后再设计。在我所设计的这辆无人驾驶电动公交车上,它的传动系所用的是二挡减速器,根据要求选择合适的最高传动比、最小传动比、以及主减速比。然后通过最高车速以及最大爬坡度来校核所选择的传动比。该辆公交车环境感知系统选择一个三维激光雷达布置在车顶,两个二维毫米波雷达分别布置在车头和车尾、三个相机两个放在车头一个放在车尾和四十个超声波传感器,车头四个车尾四个车身每隔半米一个。最后在这些的基础上计算所得数据,对汽车进行总布置设计。
关键词:无人驾驶纯电动公交车; 总体设计; 电机; 电池; 底盘布置 [版权所有:http://think58.com]
Abstract
This paper writes the overall design of an autonomous intelligent pure electric bus, whose length is 8.2 meters.
By consulting a large number of literatures, and then starting from choosing drive motor and battery, and then design the motor and battery that meet the driving requirements. It's different from a fuel car, after choosing the motor and the battery, The structural design of integrated electric vehicle needs to analyze the driving system, steering system and braking system before designing. In the autonomous intelligent pure electric bus that I designed, whose transmission system USES a two - gear reducer, and selects the appropriate maximum gear ratio, minimum gear ratio, and main reduction ratio as required. Then check the transmission ratio by maximum speed and maximum climb. The bus environment perception system selects a three-dimensional laser radar to be placed on the roof of the vehicle. Two two-dimensional millimeter-wave radars are arranged at the front and rear of the vehicle, three cameras two of them at the front, one at the rear, and forty ultrasonic waves, four cars at the front of the car, four cars at the rear, one at every half meter. Finally, on the basis of these calculations, design the overall layout of the car.
Keywords: Autonomous intelligent pure electric bus; overall design; motor; battery; Chassis arrangement
Mg:Total weight 122500N
f: The resistance coefficient of the car on a good road takes 0.01
Ua:Car speed
CD:Air resistance coefficient takes 0.6
A: Car frontal area
The maximum speed is 60km/h for design requirements
Windward area A = vehicle width × height
A=2450×2990=7325500mm2=7.3m2
P=33kw
From this we can know that the power of the motor is at least 33kw, but considering the influence of other accessories, we choose the permanent magnet synchronous motor with a rated power of 45kw.
Some of the parameters of the motor I selected are as follows:
Model Number:TZ260XS45
Rated/peak power: 45/80kw [来源:http://think58.com]
Rated torque:286.5Nm
Rated/peak speed: 1500/5000rpm
Permanent Magnet Motor Controller:
Model: KTZ384X127S45
Rated power: 60KW
Input voltage: DC288~460V
Input voltage: 380V
[来源:http://www.think58.com]
List
Chapter one Introduction 1
1.1 Significance of topic 1
1.2 History of Autonomous intelligent pure electric bus 1
1.3 Main problems faced by Autonomous intelligent pure electric buses 4
Chapter Two Structure of bus 7
2.1 Axis number 7
2.2 Driven form 7
2.3 The layout of bus 7 [来源:http://www.think58.com]
Chapter Three Choice of the main parameters of the bus 9
3.1 Size parameters 9
3.1.1 Outside dimensions 9
3.1.2 Wheelbase 9
3.1.3 Front track and rear track 9
3.1.4 Front Suspensions and Rear Suspensions 10
3.2 Quality parameters 11
3.2.1Vehicle equipment quality 11
3.2.2 Car carrying capacity, loading quality ,total quality of the car 11
3. 2.3Axial load distribution 12
3.3 Determination of vehicle performance parameters 12
3.3.1 Maximum speed 12
3.3.2 Gradeability 13
3.4 Passive geometric parameters 13
3.5Handling stability parameters 13
3.6 Ride parameters 14
3.7Body form 14
3.8 Tire selection 14 [来源:http://www.think58.com]
Chapter Four Selection and Check of Autonomous intelligent pure electric bus Power System 15
4.1 Motor 15
4.2 Battery selection 17
4.3 Transmission Selection 18
4.4 Power Performance 19
Chapter Five Car chassis assembly selection and layout 20
5.1 Steering system 20
5.2 Braking System 20
Chapter Six Automatic driving principle 23
Chapter Seven Verification 26
7.1 Verification of maximum climbing grade 26
7.2 Verification of the maximum speed 26
7.3 The turn of the steering wheel 27
Chapter Eight Conclusion 29
Reference 30
Acknowledgements 31
Appendix 32
[来源:http://think58.com]
上一篇:大众高尔夫轿车前麦弗逊式悬架的设计(含CAD零件装配图,CATIA三维图)
下一篇:自动驾驶微型纯电动车总体设计(含CAD图,CATIA三维图)