
自动驾驶通用执行机构控制系统设计(含CAD零件装配图,CATIA三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
自动驾驶通用执行机构控制系统设计(含CAD零件装配图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书13000字,CAD图13张,CATIA三维图,Adams,Simulink,答辩PPT)
摘要
本文首先介绍了国内外自动驾驶装置领域的研究状况以及其执行机构的设计特点,从而确定了本文所采取的执行机构设计方案。之后,以某A0级乘用车其制动踏板为被控对象,根据其踏板特性数据,对电机与减速机选型。然后介绍了本文所设计的控制系统采用的飞思卡尔MC9S12XS64CAE型单片机处理器以及电机编码器。接着在MATLAB/Simulink中对控制系统以及电机、减速机进行了仿真建模,在Adams中对机械结构和踏板进行了仿真建模,最后,搭建了Adams与Simulink联合仿真接口,进行了联合仿真,以验证控制系统的控制效果。结果表明,本控制系统可控制踏板在约0.15s内动作至指定位置,最大超调量为0.84°,稳定后,其稳态误差值小于0.4°,这说明本控制系统响应速度是满足要求的,且控制精度也是可以接受的。
本文主要特点是利用Adams软件与MATLAB/Simulink软件进行了联合仿真,将两者的优点结合起来,在软件层面对控制系统进行了验证。
关键词:MATLAB/Simulink;自动驾驶装置;控制系统 [资料来源:THINK58.com]
Abstract
This paper designs a control system which can be used in the general actuator of automatic driving device. The system choosesFreescale MC9S12XS64CAE as hardware platform, and MATLAB/Simulink as software development platform, uses Adams software to s model the mechanical structure, and carries out joint simulation with MATLAB/Simulink to verify the effect of the control system. The results indicate that the control system could make the pedal movement move to the specified position within 0.32S, and the static error of the position is within acceptable range.
Key Words:MATLAB/Simulink;automatic driving device;control system
本文研究内容
本文主要设计了自动驾驶通用执行机构控制系统并对相关部件进行选型。控制系统可对上位机指令迅速反应,并控制执行机构完成指令动作,同时还对踏板的实时动作位置、踏板反馈力进行监测,防止电机堵转,实现对踏板的位置控制。
设计包含以下几部分:控制部分设计、感知部分设计同时对驱动部件选型。
控制部分中,控制器以16位单片机为基础,合理设计并优化伺服控制算法,做到对位置传感器和力传感器的反馈信号做出分析、决策,避免电机堵转烧毁,实现踏板位置控制。
[版权所有:http://think58.com]
感知部分主要是对于踏板实时动作位置和踏板反馈力进行监测,对踏板实时动作位置和踏板反馈力进行监测,同时将监测结果反馈控制器,以实现对踏板位置的闭环控制。
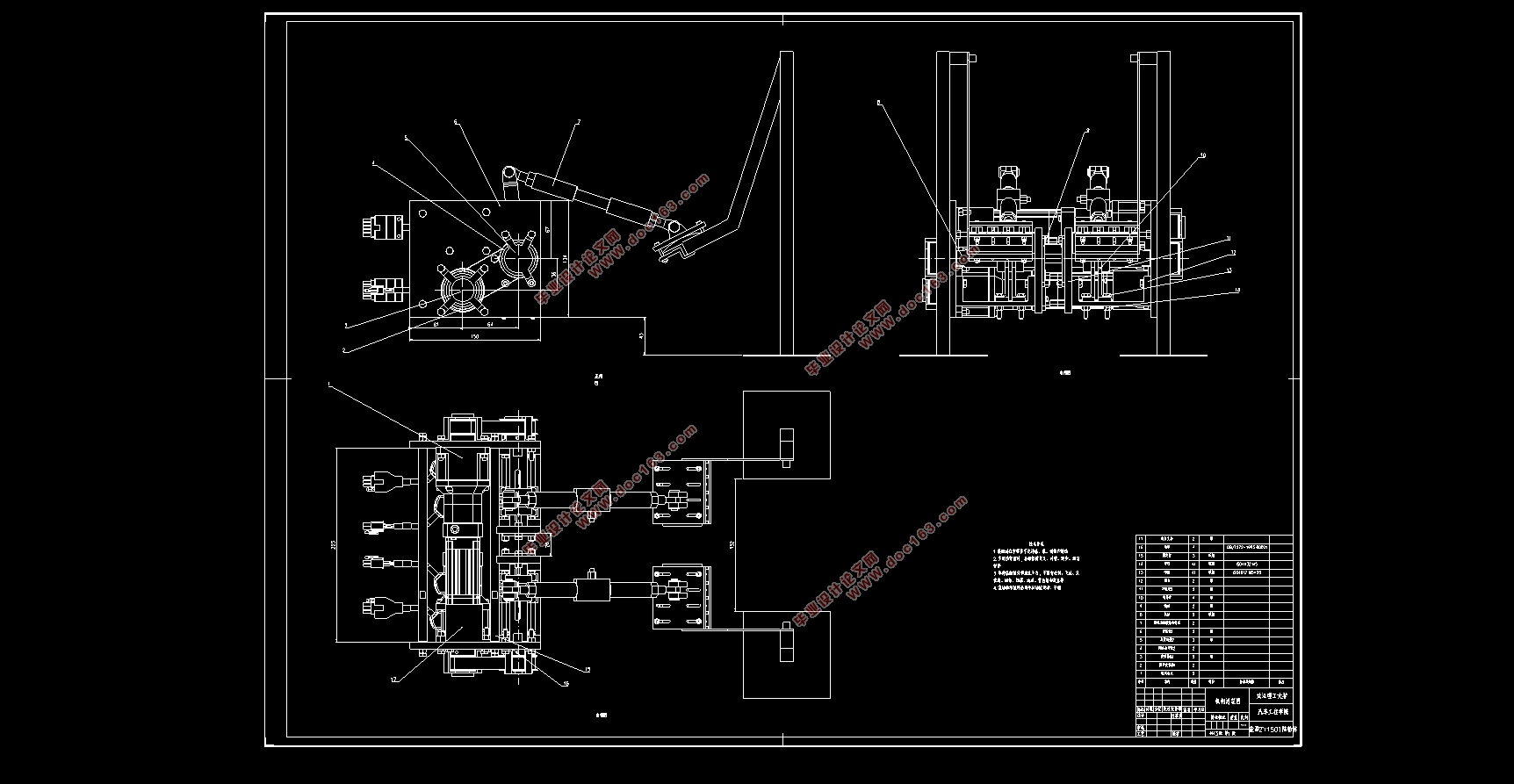
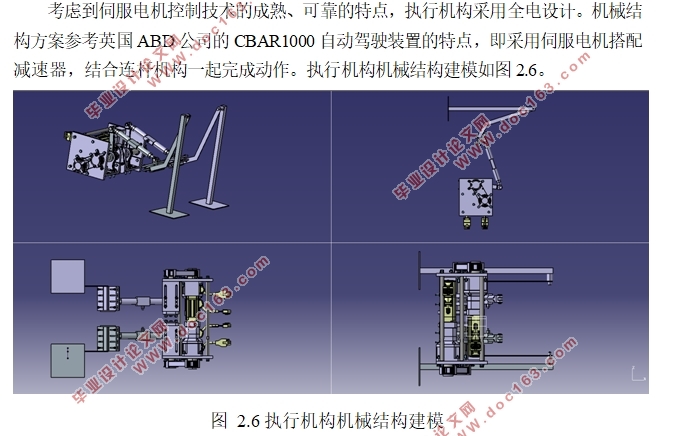
驱动部件选型,结合确定的执行机构机械结构、驱动方案,对伺服电机、减速机进行选型。
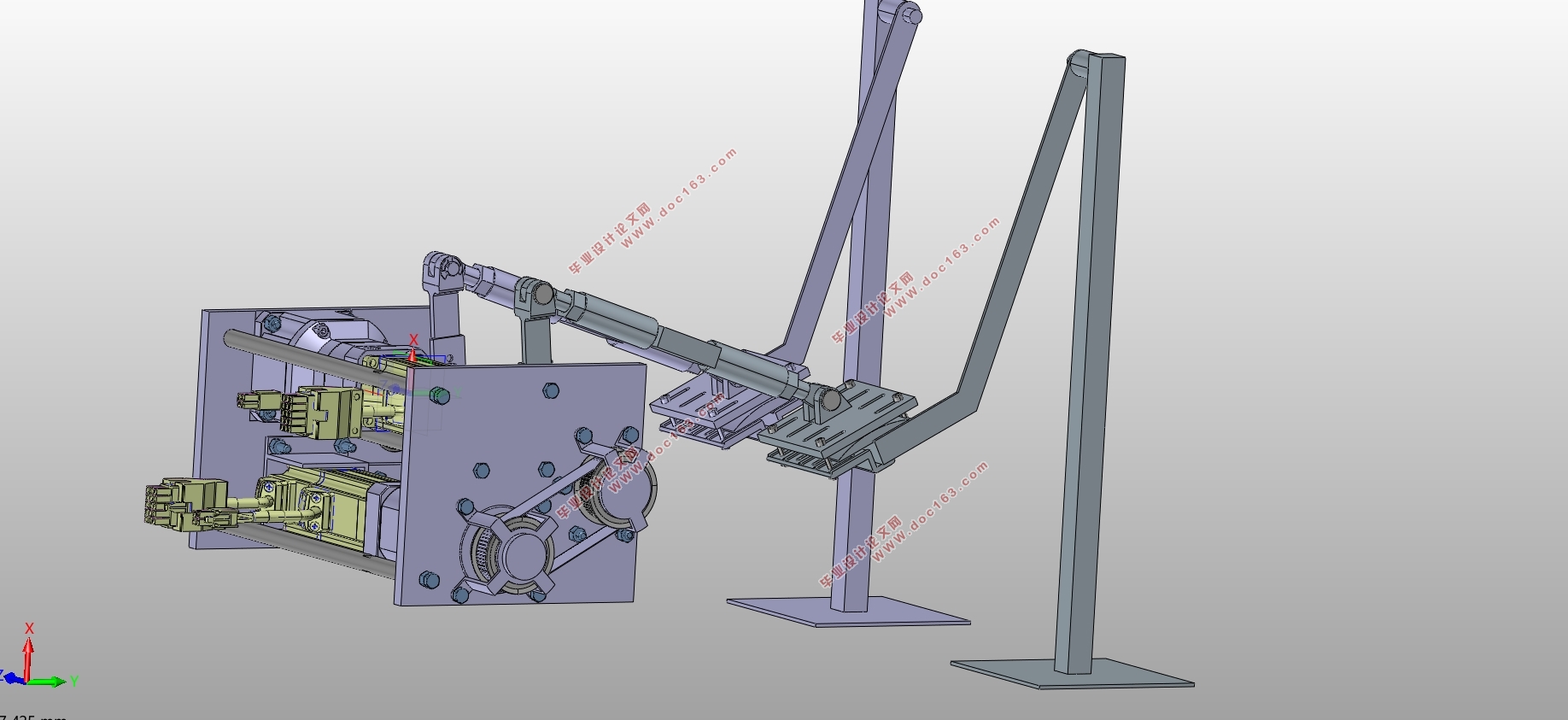
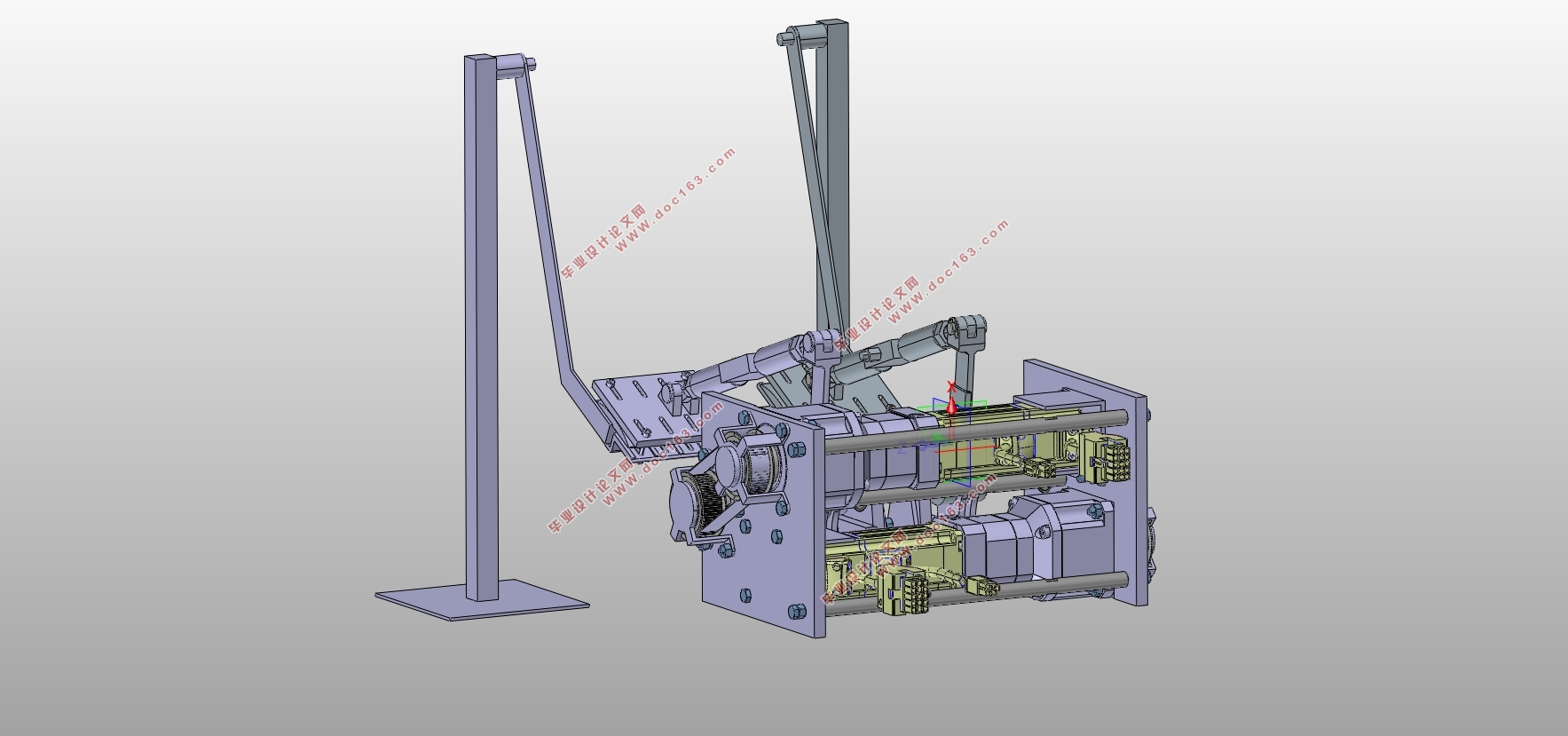
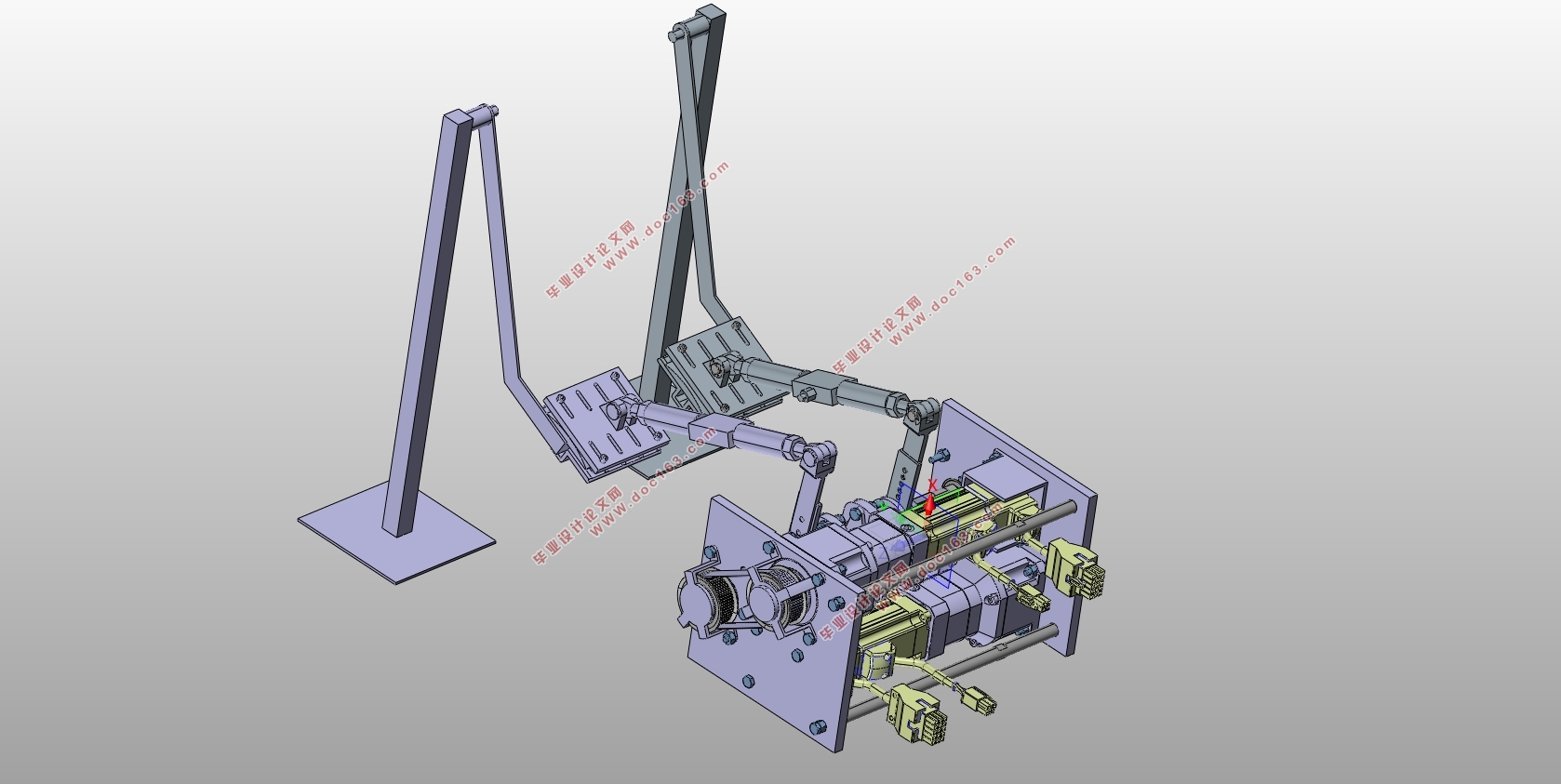
自动驾驶通用机构主要应用于自动驾驶机器人等场合。其主要功能是接受上位机传来的动作信号,通过控制电机带动传动机构,从而实现操纵踏板的目的。
2.1 整体设计概述
通用执行机构由控制系统与执行机构两部分组成。其中控制系统接受上位机动作指令并对其加以分析、处理,再向下层执行机构发出控制信号。执行机构接受到控制信号,即电机受控运行,继而带动传动机械结构,联动踏板。并通过传感器对踏板位置进行位置监测,实现闭环反馈控制,使踏板位置达到参考值。其整体控制框图见图2.1。
[来源:http://www.think58.com]
 [来源:http://think58.com]
[来源:http://think58.com] 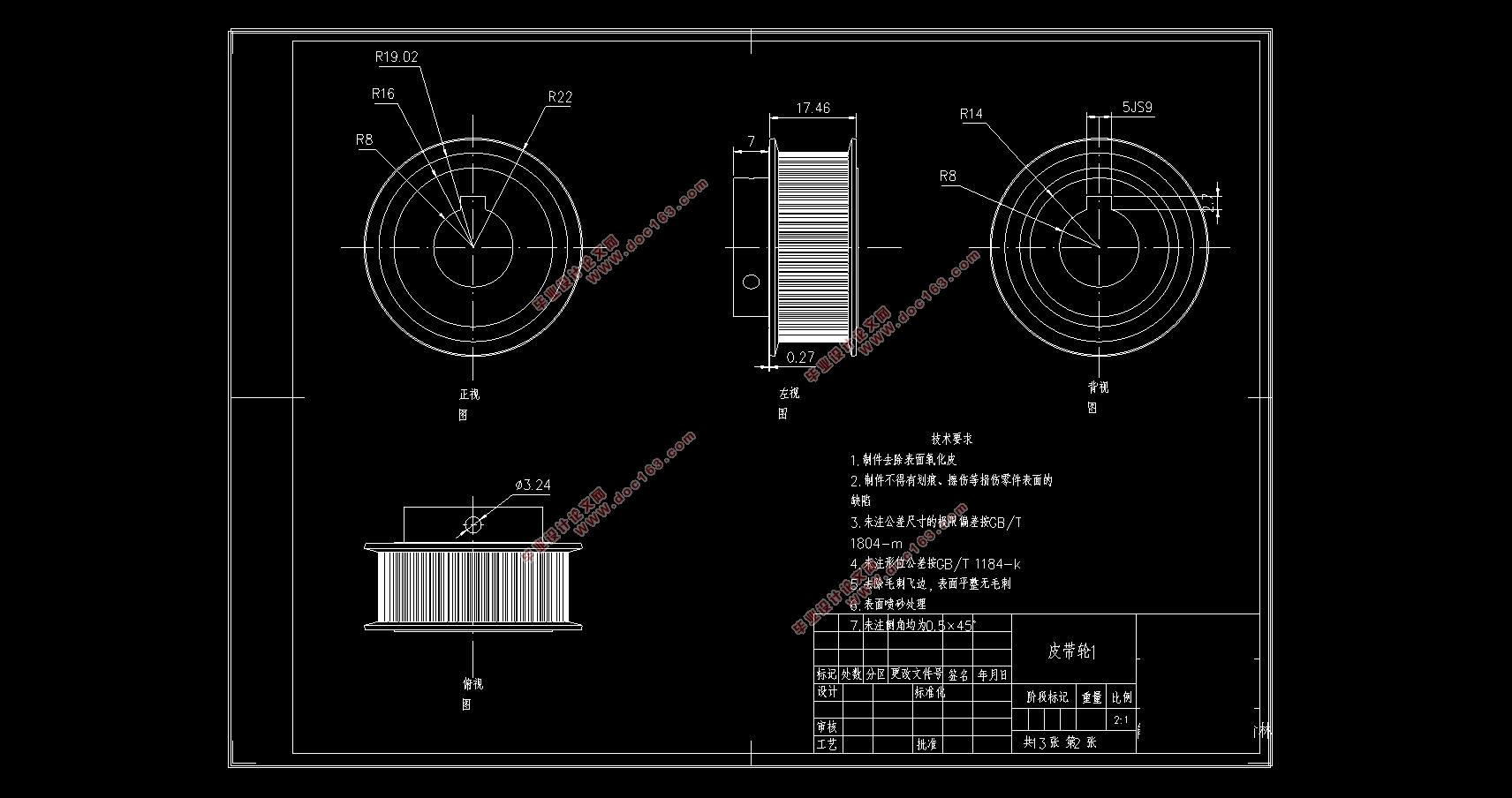
 [资料来源:http://think58.com]
[资料来源:http://think58.com] 
目录
第1章绪论 1
1.1课题研究的目的和意义 1
1.2国内外研究现状 1
1.3本文研究内容 2
第2章通用执行机构设计概述与控制系统硬件设计 3
2.1整体设计概述 3
2.1.1踏板特性 5
2.1.2电机与减速机选型 6
2.2执行机构控制系统整体设计 7
2.2.1控制系统处理器选型 8
2.2.2伺服电机编码器选型 9
2.3本章小结 9
第3章执行机构控制系统软件设计概述 10
3.1 软件语言 10
3.2 在MATLAB/Simulink中建立模型 10
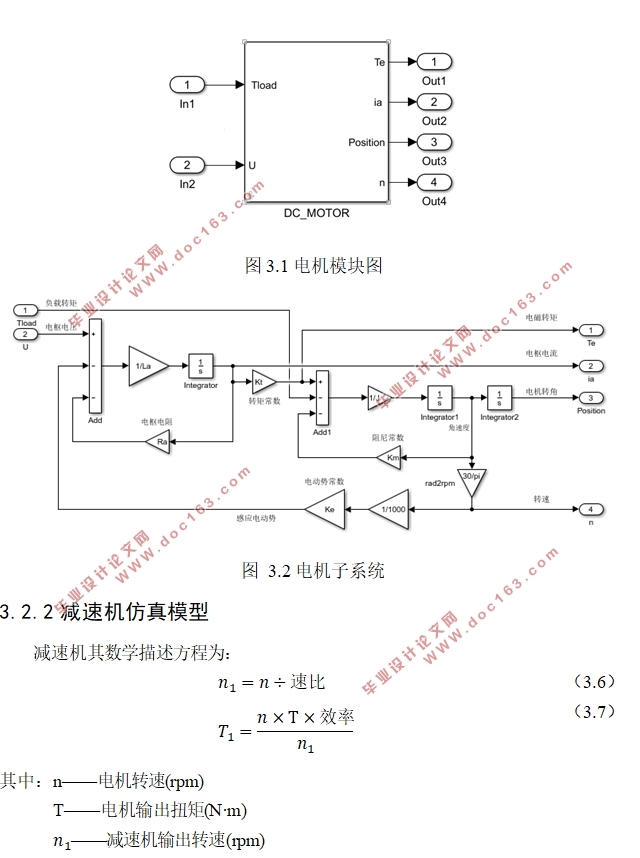
3.2.1电机仿真模型 11 [资料来源:http://THINK58.com]
3.2.2减速机仿真模型 12
3.2.3控制器仿真建模 13
3.2.4正反转以及堵转控制 14
3.2.5控制系统及电机总成整体模型 15
3.3软件模型转换为单片机语言 17
3.4本章小结 19
第4章执行机构模型建立与联合仿真 20
4.1 机械机构建模 20
4.2 搭建Adams与MATLAB/Simulink联合仿真接口 23
4.3联合仿真 25
4.4本章小结 29
第5章总结与展望 30
5.1 总结 30
5.2 展望 30
参考文献 31
致谢 33
[资料来源:www.THINK58.com]
上一篇:智能小车行驶系统设计(含CAD零件装配图,CATIA三维图)
下一篇:杰德轿车驱动桥设计(含CAD零件装配图,CATIA三维图)