
基于C8051F单片机CCD智能车软件设计
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于C8051F单片机CCD智能车软件设计(论文16000字)
摘 要
智能车辆,是一个集环境感知、规划决策、自动驾驶等功能于一体的综合系统,它集中地运用了计算机、现代传感、信息融合、通讯、电子、人工智能及自动控制等技术,是典型的高新技术综合体。
本系统以单片机C8051F020作为系统控制处理器,基于CCD传感器采集视频图像,通过对获得的图像进行处理分析,获得道路信息提取赛道黑线,并结合测速反馈实现对小车的闭环反馈控制,后轮驱动电机控制模块采用了模糊PID控制算法,充分的利用了内部提供的模糊推理机。文中介绍了赛车的软件设计,小车图像采集模块、转向模块和驱动模块的设计,以及摄像头工作机制和速度反馈的设计。
通过对智能模型车系统设计、开发及研究,取得了一定的成果,但仍有不完善的地方,有待进一步深入研究。
关键词:模糊PID CCD 图像采集 测速反馈
Research and Development of the intelligent automobile Based on CCD
Abstract
Intelligent Vehicle is a complex system integrated with a sense of environment, Planning decision and automatic driving. It is a typical high-tech complex, which focusing on the use of the computer, modern sensor technology, information syncretize, communication, electrical, artificial intelligence, automatic control, and many other disciplines.
[来源:http://www.think58.com]
The vehicle system, with the single-chip C8051F020 as its control microprocessor, Uses image-sensor module based on CCD camera to obtain lane image information, Through the acquired image processing, we get the road information and abstract the black line, then control the car on a way of closed-loop, the drive motor control module fuzzy PID Control algorithm, make full use of the fuzzy inference machine, which is integrated in the C8051F020. This paper introduces the hardware and software design of the car, and the Image acquisition module, and the design. We also display the work mechanism and Installation of the camera, the design of speed feedback.
Through design, develop and research on intelligent vehicle, have made a Certain result, but there some aspect need improve and deeply research.
Keywords: Fuzzy-PID CCD Image acquisition Speed feedback
本文的主要研究内容及章节安排
第一章绪论。本章简要介绍了智能车的概念、研究意义、发展趋势,国、内外的发展状况和各章节的安排。
[来源:http://think58.com]
第二章智能车软件设计环境。这一章介绍了软件开发设计环境Keil及其特点。
第三章智能车系统总体介绍。这一章介绍了智能车系统应具有的主要功能模块,重点介绍了道路信息检测模块的方案选定,并简要介绍了面阵CCD、C8051F020的内部资源结构。
第四章智能车系统软件设计。本章主要介绍了各功能模块的软件的设计。
[资料来源:http://www.THINK58.com]
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 引言 1
1.2 智能车的国内外发展概况 2
1.3 本文的主要研究内容及章节安排 3
第二章 智能车软件设计环境 5
2.1 软件设计开发环境Keil 5
2.2 Keil的特点 5
第三章 智能车系统总体介绍 8
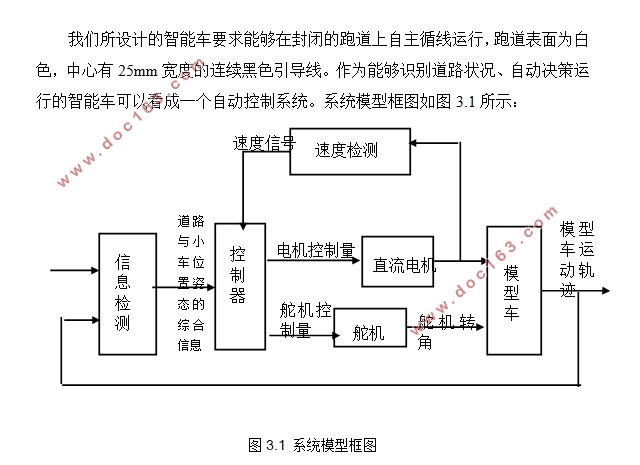
3.1 整体设计概述 8
3.2 道路检测模块方案分析 9
[来源:http://www.think58.com]
3.3 关于CCD的简要介绍 10
3.4 关于C8051F020的简要介绍 11
3.5 关于智能小车的比赛规则(以第七届飞思卡尔智能车赛道规则为例) 12
第四章 智能车系统软件设计 16
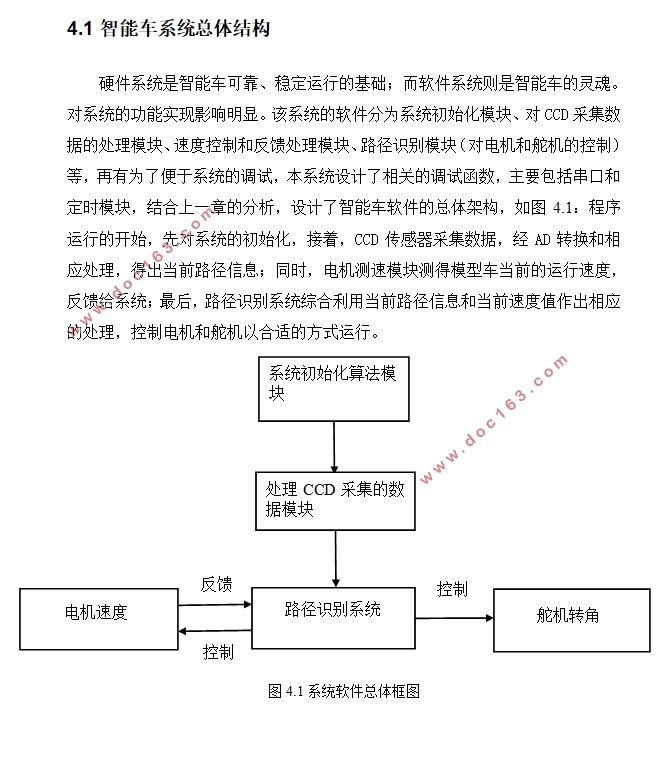
4.1智能车系统总体结构 16
4.2 各模块的初始化 17
4.3 图像的采集与处理方法 19
4.4 图像处理 23
4.5 动态阈值法 25
4.6 速度控制和舵机转角 26
4.7控制算法的简单介绍 27
4.8速度检测模块 29
4.9速度控制和舵机转向控制的算法 30
结 语 31
参考文献 32
致 谢 33 [版权所有:http://think58.com]