
基于单片机的汽车防碰撞系统设计(程序清单)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于单片机的汽车防碰撞系统设计(系统电路图,程序清单)(任务书,开题报告,论文14000字,系统电路图,程序清单)
摘要
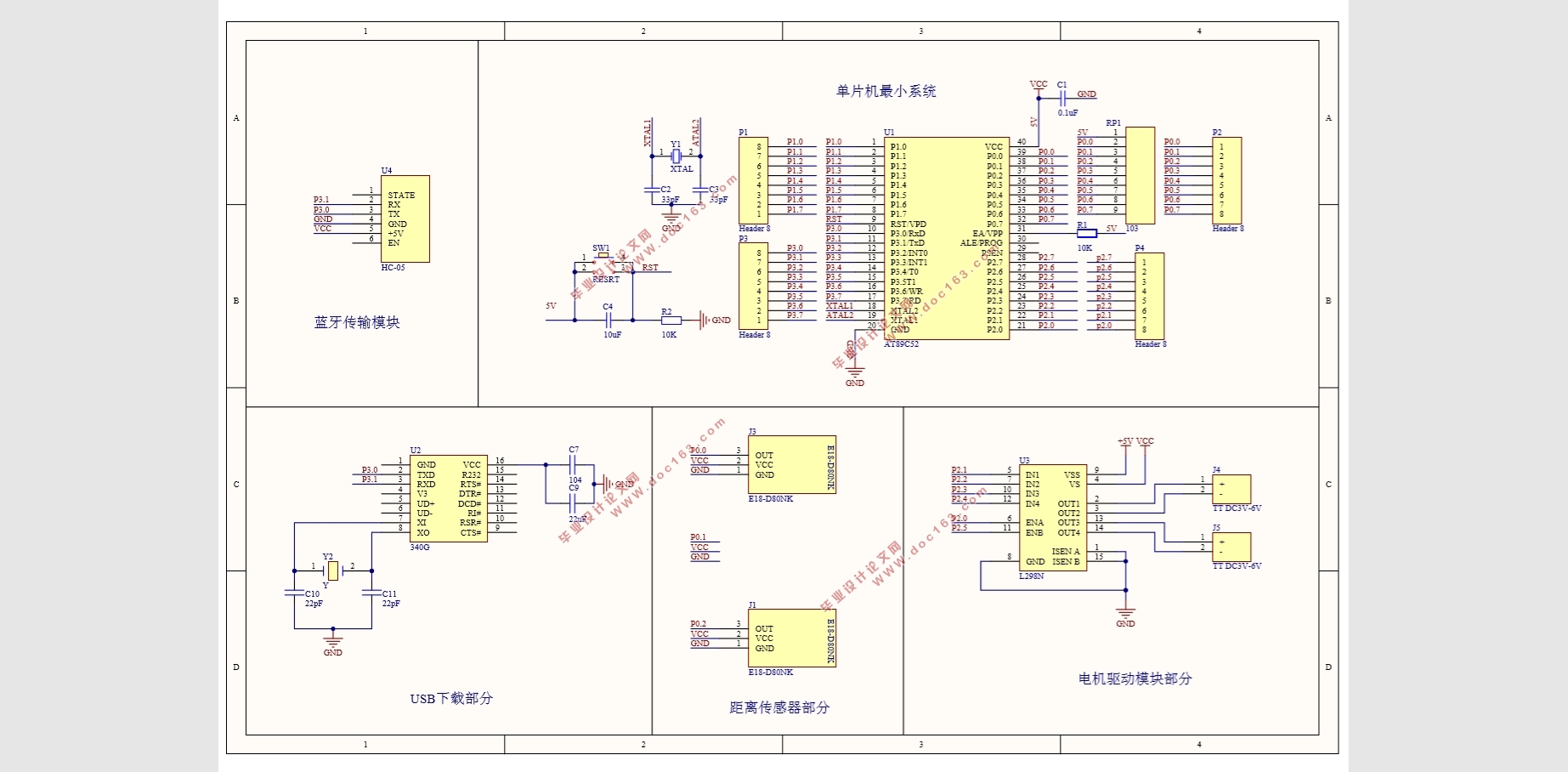
车辆的防碰撞问题是影响乘客生命安全的关键问题,也是目前研究热点问题。本文研究的是一种基于51单片机的车辆防碰撞系统,主要由STC89C52单片机,红外距离传感器,蓝牙通信模块,直流电机驱动系统以及智能小车车体构成。系统能通过蓝牙通信模块接受行进指令,且在行进过程中自动检测障碍物,并通过车辆运动学分析设计合理的避障轨迹,并控制车辆合理避障。
本文的主要研究内容如下:(1)基于已有车体结构,提出了控制系统构成,并搭建了有效的实验平台;(2)针对红外距离传感器的性能特点,提出了障碍物检测传感器布置方案,并基于该方案设计了测量模型,实验证明,该模型能有效检测障碍物;(3)设计了控制系统硬件平台,并完成了硬件电路的调试与性能测试;(4)根据车辆运动学规律,设计了避障控制轨迹,并编写了Keli C平台下的控制软件代码,能实现车辆的有效避障。
实验结果表明,基于51单片机的车辆控制系统,能准确识别障碍物,并通过对前方障碍物的方位的判断,结合自身运动学特性做出反应:(1)安全距离足够,则继续运行;(2)安全距离内报警,并进行减速、转向运动,有效执行避障动作。本文的研究能有效避免车辆与障碍物之间的碰撞,对于提高车辆行驶安全,保障乘客生命财产安全具备一定的意义。 [版权所有:http://think58.com]
关键词:51单片机、障碍物检测、避障、智能控制。
Abstract
The anti-collision problem of the vehicle is a key problem affecting the safety of passengers, and it is also a hot issue. In this paper, a vehicle based on 51 single-chip anti-collision system, mainly by the AT89C52 microcontroller, infrared distance sensor, Bluetooth communication module, DC motor drive system and intelligent car body composition. The system can receive the driving instruction through the Bluetooth communication module, and automatically detect the obstacle during the course of the process, and through the vehicle kinematics analysis to design a reasonable obstacle avoidance trajectory, and control the vehicle reasonable obstacle avoidance.
This paper mainly about:(1) Based on the vehicle body, the control system is put forward andbuilt an effective experimental platform. (2) According to the characteristics of the infrared distance sensor,the scheme of the obstacle detection sensor is put forward, and the measurement model is designed based on the scheme. The experiment proves that the model can effectively check the obstacle. (3) Design the hardware platform of the control system and complete the debugging and performance test of the hardware circuit. (4) According to the law of the kinematics of the vehicle, the model can be used to check the obstacle. The design of the obstacle avoidance control trajectory, and the preparation of the Keli C platform under the control software code, can achieve the effective obstacle to the vehicle. [来源:http://www.think58.com]
The experimental results show that the vehicle control system based on 51 single-chip microcomputer can accurately identify the obstacle and react with the direction of the obstacle in front, and combine with its own kinematic characteristics: (1) the safe distance is enough. (2) within the safe distance alarm, and slow down, steering movement, the effective implementation of obstacle avoidance action. The research of this paper can effectively avoid the collision between vehicle and obstacle, which is of great significance to improve the safety of vehicle and ensure the safety of life and property of passengers.
Key Words:51 single-chip,distance sensor,obstacle, smart control.
[资料来源:http://THINK58.com]

目录
第1章绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状分析 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
第2章整体设计方案 4
[资料来源:http://THINK58.com]
2.1 设计基本内容与目标 4
2.2 总体技术方案 4
2.3 具体方案选择 5
2.3.1 小车模型选择 5
2.3.2 电机驱动模块选择 6
2.3.3 电源模块选择 7
2.3.4 距离传感器选择 7
2.3.5 显示报警方式 10
第3章车辆防碰撞系统硬件部分设计 11
3.1 电机参数 11
3.2 主控电路设计 11
3.2.1 STC89C52单片机 11
3.2.2 单片机最小系统构成 13
3.2.3 数据下载模块 14
3.3 电机驱动模块 15
3.4 红外距离传感器 16
3.5 蓝牙模块 18
3.6 小车机械结构 19
第4章车辆防碰撞系统软件部分设计 21
4.1 电机驱动L298N部分 21
4.2 脉宽调速部分 22
4.3 避障情况判断部分 23 [资料来源:http://THINK58.com]
4.5 蓝牙通信模块 25
第5章系统调试与实验 27
5.1 小车避障轨迹设计 27
5.2 有效的预警距离计算 28
5.3 避障性能实验 29
5.4 调试中遇到的问题及解决方案 30
第6章结论 32
6.1 全文总结 32
6.2 系统存在的缺陷与不足 32
参考文献 34
致谢 36
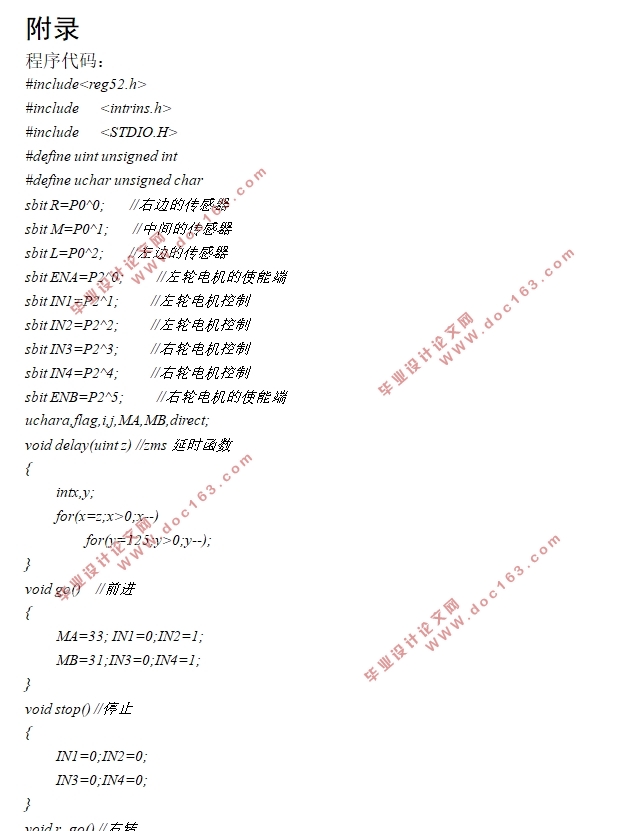
附录 37 [来源:http://think58.com]