
基于AVR单片机的寻迹机器人的制作(论文)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
【摘要】
论文是在对以往的行走机器人认真研究和仔细论证的基础上独立的设计出一款符合基本功能的寻迹机器人。它通过传感器,沿着黑色引导线行走,并且在行进过程中自动避开障碍物。整个功能的实现主要由5块电路板完成实现,分别为最小系统模块、寻迹模块、蔽障模块、主板模块、电机驱动模块。最小系统模块采用了ATMEL公司的8位ATmega128。寻迹部分采用了红外线发光二极管和光电传感器组成的传感器阵列;避障部分采用红外线发光二极管和光敏传感器组成的传感器阵列;电机驱动部分采用LB1630来控制电机。考虑到直流电机的转速过快,电机采用了直流减速电机。
论文主要包括四章内容,首先介绍机器人的发展应用和基本原理,然后重点分析了硬件电路的设计,软件程序的设计,最后调试结果进行总结和分析。
【关键词】 机器人; 寻迹; 单片机; 电机
1 设计思路和总体方案
1.1 寻机机器人的功能
该寻迹机器人可以实现在任意区域内沿引导线行进。 机器人在行进的过程中会显示电机的工作状态,而且可以自动绕开障碍物。
1.2 机器人的总体设计方案
本设计采用ATmega128单片机作为核心控制单元。采用红外光电传感器检测路面黑色引导线,使用光敏传感器检测、判断障碍物的位置,利用PWM(脉宽调制)技术动态控制电动机的转动方向和转速。通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的存储、显示。
绪 论
机器人技术是一门综合了传感与检测、运动控制、图形图像处理等技术的新型学科,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,涉及到当前许多前沿领域的技术。随着电子技术的飞速发展,智能机器人在越来越多的领域发挥着人类无法代替的作用。
机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。在研究和开发未知及不确定环境下作业的机器人的过程中,人们逐步认识到机器人技术的本质是感知、决策、行动和交互技术的结合。随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器,如移动机器人、微机器人、水下机器人、医疗机器人、军用机器人、空中空间机器人、娱乐机器人等。
机器人以其具有灵活性、提高生产率、改进产品质量、改善劳动条件等优点而得到广泛应用。但是,目前绝大多数机器人的灵活性,只是就其能够"反复编程"而言,工作环境相对来说是固定的,所以一般人们称之为操作手(Manipulator)。正如人类活动范围和探索的空间是人类进步的标志一样,机器人的智能同样体现在运动空间的大小上。为了获得更大的独立性,人们也对机器人的灵活性及智能提出更高的要求,要求机器人能够在一定范围内安全运动,完成特定的任务,增强机器人对环境的适应能力。因此,近年来,移动机器人特别是自主式移动机器人成为机器人研究领域的中心之一。 [资料来源:http://THINK58.com]
我国的智能机器人和特种机器人在“863”计划的支持下,也取得了不少成果。其中最为突出的是水下机器人,6000米水下无缆机器人的成果居世界领先水平,还开发出直接遥控机器人、双臂协调控制机器人、爬壁机器人、管道机器人等机种;在机器人视觉、力觉、触觉、声觉等基础技术的开发应用上开展了不少工作,有了一定的发展基础。但是在多传感器信息融合控制技术、遥控加局部自主系统遥控机器人、智能装配机器人、机器人化机械等的开发应用方面则刚刚起步,与国外先进水平差距较大,需要在原有成绩的基础上,有重点地系统攻关,才能形成系统配套可供实用的技术和产品,以期在“十五”后期立于世界先进行列之中。
硬件电路的设计
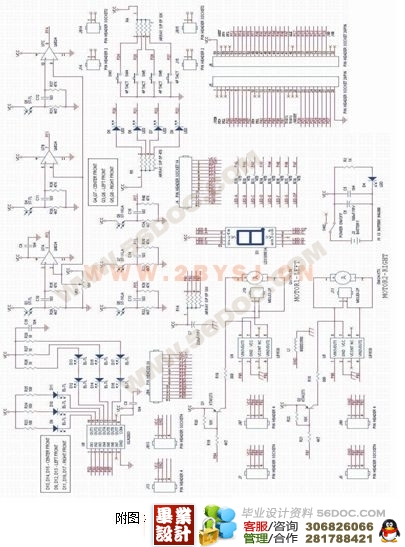
寻机机器人的硬件主要分为6个部分:ATmega128最小系统模块、主板模块、蔽障模块、寻迹模块、电机驱动模块、底盘。寻迹机器人的硬件电路设计如图所示。
软件程序的设计
寻迹机器人的软件程序部分主要是单片机端口的初始化、定时器初始化、PWM初始化、寻迹、障碍物检测、LED指示、电机控制。其中寻迹、障碍物检测及电机控制也是本次程序的主要内容。根据采集到的数据,控制电机是本次程序的难点。
寻迹机器人的程序设计流程图如下图所示。软件对ATmega128单片机进行初始化后,首先会读取寻迹模块的光电传感器阵列的采集数据,并根据数据的分析结果,控制电机的旋转方向、旋转速度及时间;然后读取蔽障模块的光敏传感器阵列的采集数据根据数据的分析结果,控制电机的旋转方向、旋转速度及时间,最后又回到开始部分重新读取寻迹模块的光电传感器阵列的采集数据,重复进行上述步骤,从而通过软件,实现寻迹和蔽障功能。


 [资料来源:http://THINK58.com]
[资料来源:http://THINK58.com] 

目 录
绪 论 1
1 设计思路和总体方案 2
1.1 寻机机器人的功能 2
1.2 机器人的总体设计方案 2
2 硬件电路的设计 7
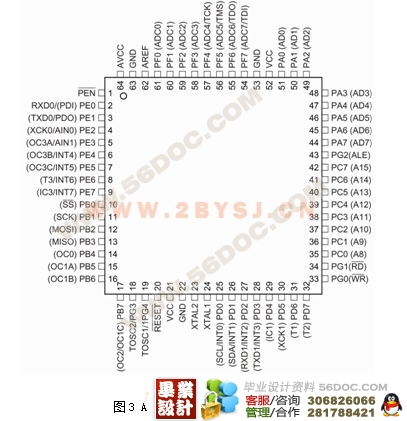
2.1 ATmega128最小系统模块的设计 7
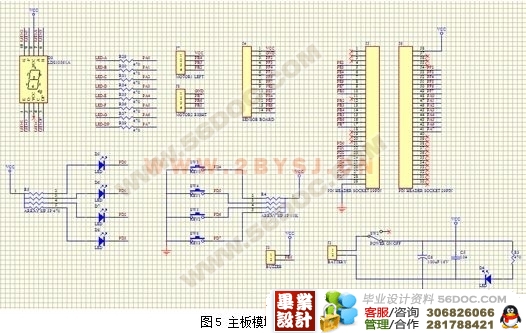
2.2 主板模块的设计 8
2.3 寻迹模块的设计 8
2.4 蔽障模块的设计 10
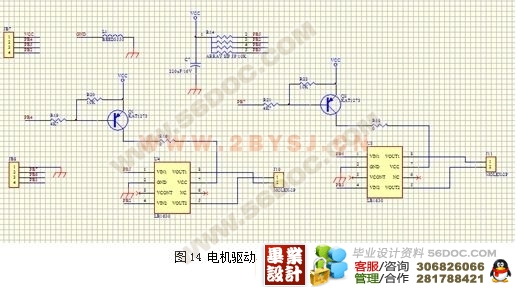
2.5 电机驱动模块 11
2.6 底盘模块 11
(毕业设计 )
3 软件程序的设计 13
3.1 ATmega128单片机初始化函数 14
3.2 定时器初始化函数 14
3.3 PWM初始化函数 18
3.4 数据采集函数 20
3.5 主函数 23 [资料来源:http://think58.com]
3.6 蔽障函数 24
结 论 26
致 谢 27
参考文献 28
附 录 29 [来源:http://www.think58.com]
论文在导师的悉心指导下,历时4个多月,整个过程的进度基本是按照任务书中的时间安排进行。在仔细研究以往行走机器人的基础上,根据其本身的优点,进一步改进,完善其功能,取得以下研究成果和结论:
(1) 以AVR单片机为控制核心,通过采用LB1630电机驱动芯片控制2个直流减速电机,从而实现机器人的基本功能,如:前进、后退、加速、减速及拐弯等功能。
(2) 系统采用3组红外线发光二极管和光电传感器组成的传感器陈列,实现黑线的检测,并将采集数据发送给单片机。
(3)系统采用3组由2个红外线发光二极管和1个光敏传感器组成的传感器阵列,实现障碍物的检测,并将数据发送给单片机。由于AVR单片机片内有模数转换功能,外围不加AD转换功能也可以实现采集数据的分析。
(4)系统外围布置了中断按键、7段数码管及LED。通过7段数码管和LED可以监视机器人及电机的运行现状,并通过中断按键对机器人进行简单控制操作。
(5)软件系统采用AVR GCC C语言编程。这相对于汇编简单,直观,易于修改。可以在线编程。
上述成果表明,基于单片机的寻迹机器人的设计与初步实现,软硬件设计方案合理,基本上达到了预期的目的。论文的研究符合了实际的需要,为以后的进一步开发和研制打下了基础。 [资料来源:http://THINK58.com]
由于光电传感器设计部分比较复杂,受阳光和日光灯的干扰较大,信号微弱,精度要求较高,因此为电路设计提出了较高的要求,同时也增加了难度,在设计和调试过程中遇到了不小的困难,但经过认真研究思索最终突破了难关。寻迹机器人在绕过障碍物的时候,需要考虑距障碍物的距离以及左右两侧电机的转速和旋转方向,才能成功地绕过障碍物后检测到黑线并沿着黑线行进,因此为编程带来了一些麻烦。
[资料来源:http://www.THINK58.com]
参考文献
[1] 陈冬云,杜敬仓,任何燕. ATmega128 单片机原理与开发指导.北京:机械工业出版社,2006年,P1-139.
[2] 张军.AVR单片机应用系统开发典型实例.北京:中国电力出版社,2005年,P229-248.
[3] 吴双力,崔剑.AVR-GCC与AVR单片机C语言开发.北京:北京航天航空大学出版社,2004年,P82-157.
[4] 刘爱华,满宝元.传感器原理与应用技术.北京:人民邮电出版社.2006年,P153-169.
[5] 郁有文,常健,程继红.传感器原理及工程应用.西安:西安电子科技大学出版社,2000年,P128-159.
[6] 马潮.高档8位单片机ATmega128原理与开发应用指南.北京:北京航空航天大学出版社,1994年,P1-347.
[7] 高鹏,安涛,寇怀成.Protel 99 入门与提高.北京:人民邮电出版社,2002年,P319-377.
[8] 沈文,Eagle lee,詹卫前.AVR单片机C语言开发入门指导.北京:清华大学出版社,2003年,P53-143.
[9] 丁华成,耿德根,李君凯.AVR单片机应用设计.北京:北京航天航空大学出版社,2002年,P1-227.
[10] 求是科技.单片机典型外围器件及应用实例.北京:人民邮电出版社,2006年,P110-266.
[11] 耿德根,宋建国,马潮,叶永建.AVR高速嵌入式单片机原理与应用(修订版).北京:北京航天航空大学出版社,2002年,P1-136. http://www.papersay.com [资料来源:www.THINK58.com]
字 16000
[来源:http://think58.com]
[资料来源:THINK58.com]