
基于AT89C2051单片机自行车里程速度表的设计

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
摘要:给出了以AT89C2051为核心,利用单片机的运算和控制功能,并采用系统化LED显示模块实时显示所测速度和里程的速度里程表设计方案。该方案由于使用了系统化LED显示模块和E2PROM,以及高效快速算法,因而可在节约系统资源和简化程序设计的基础上保证测量精度和系统实时性。
关键词:速度里程测量;单片机;LED显示模块;串口数据存储;实时数据处理; 声光报警; 速度记忆
[资料来源:http://think58.com]
.系统的硬件设计
1电源模块设计
采用SPWM 技术,利用脉动信号给电瓶进行充电,并设计电瓶保护电路。根据当公式,发电机输出电压Uo与发电机激磁电流I,发电机的转速N以及电机系数Ce之间存在如下关系:Uo = Ce3N3I。由此可见当发电机转速较低时,可以提高激磁电流I以提高发电机的输出电压。但当车速过低,并低于一定值时,无论再怎样提高激磁电流发电机的输出电压也无法再提高。
由此我们自行设计了蓄电池的充电电路,能够保证当车速较低时,电路能够自动升高激磁电压,提高发电机的输出电压;当车速较快时,又能自动降低激磁电压,以降低发电机的输出电压。这样当自行车的车速在一定范围内变化时,本电源模块均能够实时调整充电电压,实现均流充电,防止电瓶的充电不足。并根据本设计中所选用的发电机,以及平时自行车行驶的基本情况,推算出若自行车速度低于3 千米/ 小时,此时即使是将激磁电流提高到额定值,发电机的输出电压仍不能达到额定值的80 %。这时电路将自动切断激磁电流的供电电路。停止向电瓶供电以保护蓄电池。为了能够实现题目中所要求的低功耗,发电机的输出电压经过一震荡电路,以产生振荡脉冲,利用先进的SPWM―――脉宽调制技术,能够实现均流充电,并能在出现异常情况时自动切断充电电路。
由于本电源模块引入了自动控制技术,在工作过程完全不需要人的干预,避免了人为或其它因素影响电池的使用。实现了在电池寿命期限内的免维护使用。同时本模块还预留出了外接电源充电端口,以备用户在长时间不用该系统后能够进行应急充电,保证系统的工作。
2脉冲发生源
本设计采用了ST1101红外光电传感器,进行非接触式检测。当有物体挡在红外光电发光二极管和高灵敏度的光电晶体管之间时,传感器将会输出一个低电平,而当没有物体挡在中间时则输出为高电平,从而形成一个脉冲。 该系统在自行车后轮的轴处保持着与轮子旋转切面平行的方向延伸附加一个铝盘,在这个铝盘的边沿处挖出若干个圆形过孔,把传感器的检测部分放在圆孔的圆心位置。每当铝盘随着后轮旋转的时候,传感器将向外输出若干个脉冲。把这些脉冲通过一系列的波形整形成单片机可以识别的TTL电平,即可算出轮子即时的转速。
铝盘的圆孔的个数决定了测量的精度,个数越多,精度越高。这样就可以在单位时间内尽可能多地得到脉冲数,从而避免了因为两个过孔之间的距离过大,而车子正好在过孔之间或者是在下个过孔之前停止了,造成较大的误差。
本设计在铝盘过孔的设计上采用11个过孔,从而留下了10个同等的间距。这样在以后的软件设计中能够较为方便的计算出速度里程。脉冲发生源的硬件结构图如图3所示。 [资料来源:http://think58.com]
软硬件系统的调试
待测信号经预处理电路后加至单片机的P3.4(T0)引脚可为单片机测量信号频率提供有效的输入信号。单片机通过检测P3.4引脚电平来决定是否启动测量频率程序。当该引脚为高电平时,系统处于等待状态,要一直到该引脚出现低电平时才开始测频率。我们可从硬件的铝盘上知道两个过孔之间在圆周上的距离。而这个距离M正好为计算速度和距离起到了基本的数据储备作用。同时可以从TL0寄存器知道在两秒内单片机检测到的N个脉冲。而M×N所得到的正是这两秒内铝盘在圆周上所走得距离S。(此时假设在这个两秒内车子是匀速前进的),距离S除以2s的时间,就可以大概的算出这2s内铝盘的线速度。再根据铝盘与自行车的轮子保持着一样的角速度,得到铝盘的线速度与轮子线速度的关系,从而算出自行车在这2s的平均速度。
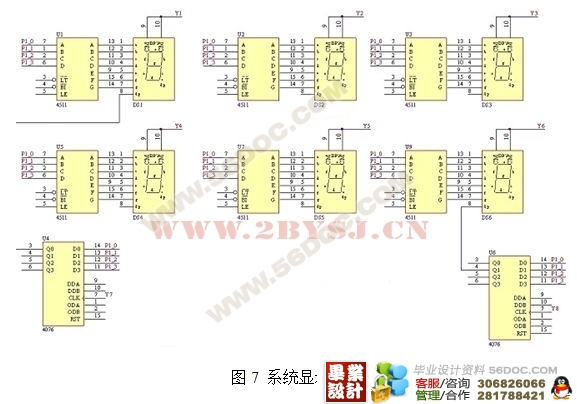
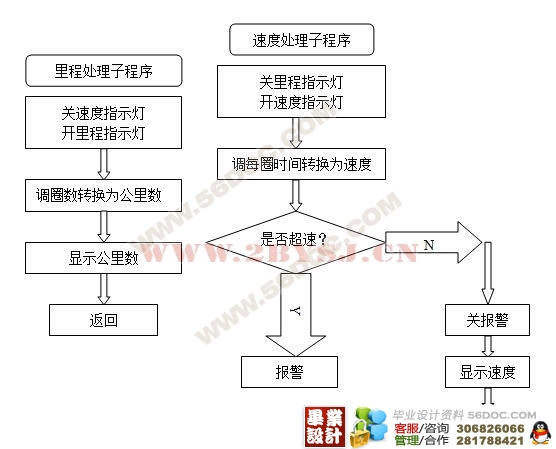
至于里程的计算,根据速度计算的分析,在得到2s内铝盘在其圆周上走过的距离后。根据它与自行车轮子的圆周走过的距离有一定比例关系(通过两者角速度一样的算法)可以通过单片机的算出自行车在这两秒内走过的路程S1。把这个路程S1与存储器原来的里程数相加即可得到目前的总里程数。通过单片机计算出来的速度和里程的数据,必须通过BCD码的转换才能输出给显示模块。总里程数的显示是设定出现在电动自行车开动,单片机开机经过初始化后显示出来,这样以来用户可以清楚的知道自己的车子已经运行了多少公里了。而速度的显示则是在计算出速度里程后立刻显示出来,体现实时性。
[资料来源:http://THINK58.com]
结论
本设计以AT89C2051为核心,通过光电传感器来检测自行车的运转情况进而实现电动自行车的速度,里程的计算及里程的累计,存储,最后用6位的LED能直观的将速度与里程显示给用户,并且在速度高于一定的值时可自动向用户报警,从而达到智能速度里程表。


毕业设计说明书目录
1.引言………………………………………………………………………………16
2.方案论证…………………………………………………………………………17
2.1 方案一………………………………………………………………………17
2.2 方案二………………………………………………………………………18
[资料来源:http://think58.com]
2.3结论 …………………………………………………………………………18
3.系统的硬件设计…………………………………………………………………19
3.1电源模块设计 ………………………………………………………………19
3.2 脉冲发生源 …………………………………………………………………19
3.3 信号预处理电路 ……………………………………………………………20
3.4 单片机选择 …………………………………………………………………21
3.5 键盘模块与驱动电路 ………………………………………………………22
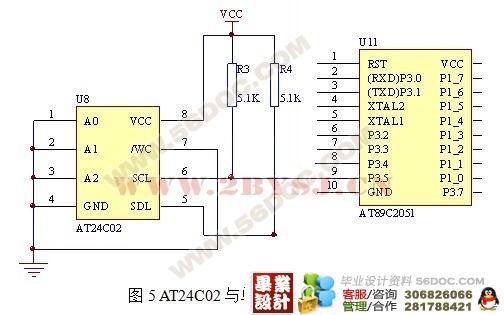
3.6 E2PROM AT24C02的应用 …………………………………………………22
3.7 显示部分 ……………………………………………………………………23
3.8 主要元器料 …………………………………………………………………25
3.8.1 AT89C2051资料 …………………………………………………………25
3.8.2 AT24C02资料 ……………………………………………………………27
3.8.3单光束直射失光电传感器ST11011资料 ………………………………28
3.8.4 74L138资料 ……………………………………………………………29
3.8.5 MC14511 BCD资料 ………………………………………………………30
3.8.6 CD4076资料………………………………………………………………31
4.系统的软件设计 …………………………………………………………………32
4.1系统软件框图…………………………………………………………………32
(毕业设计)
4.1.1系统主程序流程图 ………………………………………………………33
4.1.2各子程序流程图 …………………………………………………………34
4.2程序……………………………………………………………………………35
4.2.1主程序 ……………………………………………………………………35
4.2.2各子程序 …………………………………………………………………37
5.软硬件系统的调试 ………………………………………………………………45
6.结论 ………………………………………………………………………………45
7.附录 ………………………………………………………………………………46
8.总结 ………………………………………………………………………………47
9.参考文献 …………………………………………………………………………49
[来源:http://www.think58.com]
[来源:http://www.think58.com]