
基于单片机智能公交小车控制系统设计(含电路图,程序清单)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于单片机智能公交小车控制系统设计(含电路图,程序清单)(任务书,论文6800字)
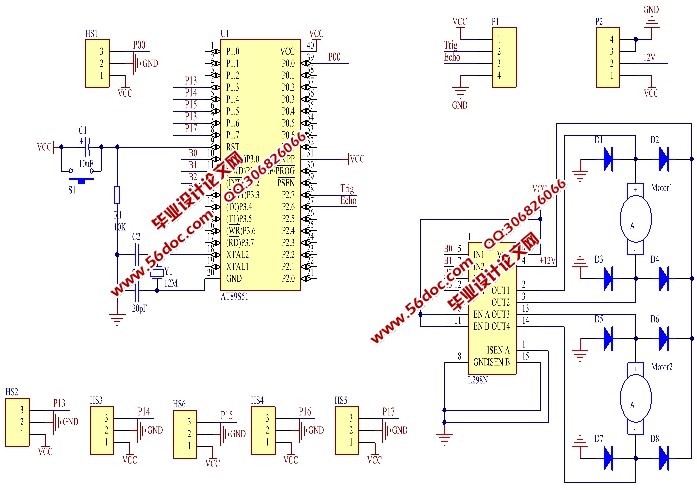
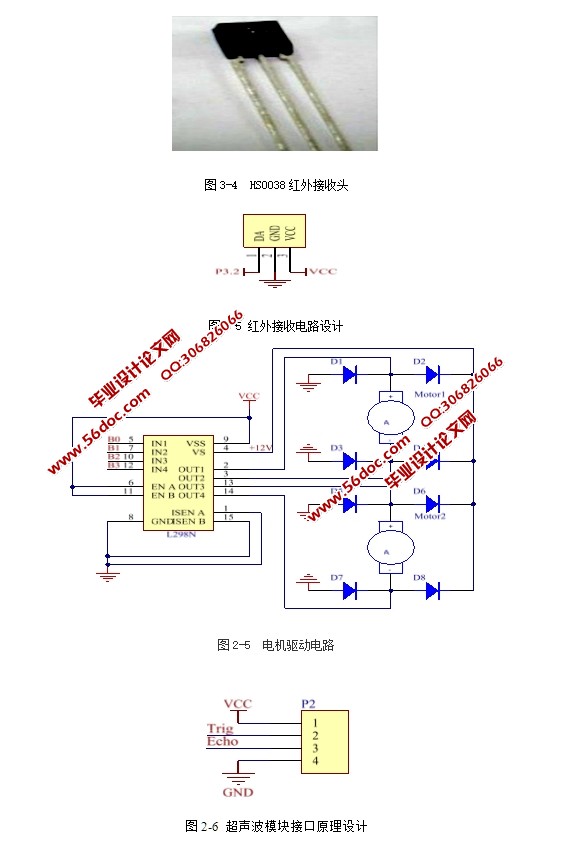
摘要 本文设计了一款基于ST89C52单片机的智能公交小车控制系统,文中首先提出系统的设计目标,通过对设计目标的分析,确定控制系统的设计方案。整个系统由单片机最小系统、光电感应寻迹模块,电机驱动模块、超声测距模块和红外接收模块组成。光电感应器寻迹模块检用于检测道路上的黑线,主控器将采集的信号进行处理后,控制电机驱动模块工作,驱动小车底盘上的两个电机工作,实现对小车速度和运动方向的控制。本设计由硬件设计和软件设计两部分组成,利用Protel软件设计电路原理图,根据原理图焊接的器件,搭建系统执行平台,采用Keil软件设计编写系统的驱动程序,实现对执行平台的实时控制,通过软件和硬件的协调工作实现智能公交小车的系统设计。本设计具有操作简单、智能化程度高、抗干扰性强的特点,可在危险或人工作业的恶劣的环境中,替代人工作业完成生产任务,避免造成人员伤亡,减少经济损失。
关键词 单片机 智能小车小车 电机驱动
The design of intelligent car system bus
Abstract In this paper, we design a control system of smart car for bus based on ST89C52 MCU. The first proposed the design target of the system, through analysis of the design objectives, determine the design scheme of the control system. The system is composed of MCU minimum system, photoelectric induction found trace die block, motor driver module, ultrasonic ranging module and the infrared receiving module. Photoelectric sensors to find trace examination module for road detection on the black line, main controller will collect the signal processing, control the motor drive module, drive the car chassis two motor to work, to realize the control of the car speed and direction of motion. This design by hardware Design and software design of two parts, using the software of Protel circuit design schematic diagram, according to the schematic diagram of the welding device, build the system execution platform, using keil software design system prepared by the driver, to realize the real time control of the execution platform, through the coordination of the software and hardware system design of intelligent bus car. This design has the advantages of simple operation, high intelligence, strong anti-interference characteristics, in the harsh environment of dangerous or manual operation, replace the manual work finish production tasks, to avoid causing casualties, and to reduce the economic loss.
Keywords intelligent car car motor drive
1.1 设计目标
(1)实现小车自动寻迹功能;
(2)通过测距,通过对测距信息的处理达到避障的目的;
(3)当检测到行驶到终点时,具备自动停止功能了;
(4)实现小车加减速控制;
1.2 设计思想
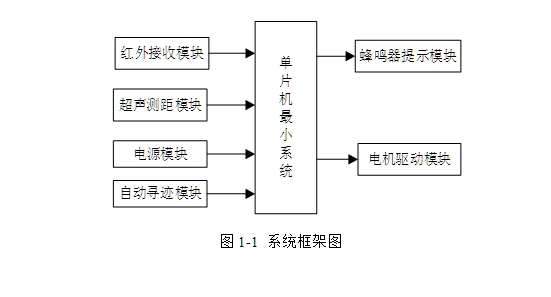
使用单片机作为主控芯片,利用红外光电传感器对地面的黑色轨迹进行检测,从而实现自动循迹功能,并且小车通过超声波测距来获得小车与障碍物的距离,通过距离的判断与比较以达到避障的目的,在小车与障碍物距离小于安全距离时,小车会自动减速前行;当小车与障碍物的距离小于危险距离时,小车会停止行驶等待知道前方障碍物被移除后小车才恢复正常行驶状态。当小车行驶到固定的终点时,通过接受站点的红外信号,小车会停止行驶。本智能小车系统由一下几个模块组成:单片机控制模块、超声波测距避障模块、自动循迹模块、电机驱动模块、蜂鸣器提示模块和红外接受模。
[资料来源:http://www.THINK58.com]
目 录
引言 1
[资料来源:http://think58.com]
第一章 系统整体设计方案 2
1.1 设计目标 2
1.2 设计思想 2
1.3 总体设计方案 2
第二章 系统硬件电路设计 4
2.1系统主要器件介绍 4
2.2 硬件电路设计 5
第三章 系统软件设计 9
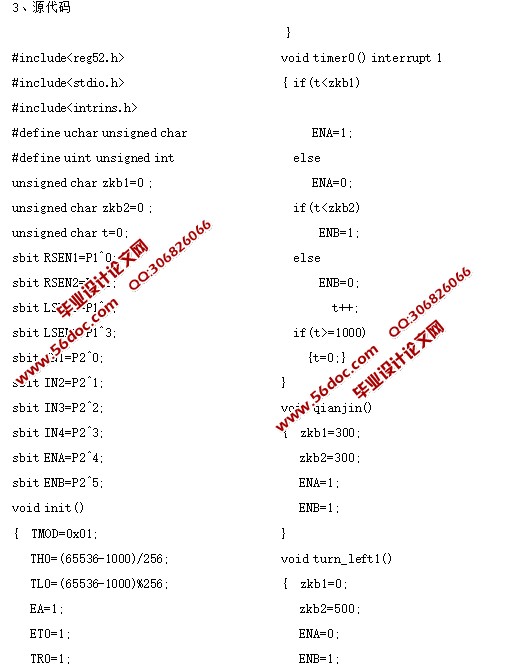
3.1 主程序设计 9
3.2 扫描程序设计 10
3.3 电机控制程序设计 10
结束语 12
参考文献 13
附录 14
[资料来源:http://www.THINK58.com]