
单激光目标跟踪系统的设计(单片机,步进电机)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
单激光目标跟踪系统的设计(选题审批表,任务书,开题报告,中期检查表,论文说明书12000字,程序)
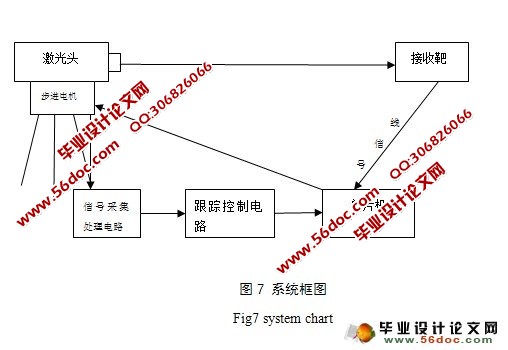
摘 要:单激光目标跟踪系统主要由一个单激光发射器,一个阵列激光接收靶,步进电机和一些相关无线发射和接收装置构成。它工作时,先由单激光发出光源打在激光靶上,确定位置,然后激光靶移动,这时光源不在原先确定的位置上了,由激光靶上面的无线发射器发射信号给无线接收端,经单片机发出指令给步进电机,再由单片机控制步进电机带动激光发射器,使光源打在原来确定的位置上,从而实现单激光目标跟踪原理。
关键词:激光发生器;激光接收靶;单片机;步进电机
Design Of The Single Laser Target Tracking System
Abstract:The single laser target tracking system is mainly composed of a single laser transmitter, a laser receiving targets, a stepper motor and a number of related infinite transmitting and receiving device. When it works, the single laser emits light in laser target, determine the position, then the laser target movement, this is the source in the original position, by a laser target the above infinite transmitter for transmitting signals to the stepper motor, and then by the single chip microcomputer to control the step motor drives the laser transmitter, so that the light sources in the the original position, in order to achieve a single laser target tracking principle.
[来源:http://think58.com]
Keyword: Laser; laser receiving targets; single chip; step motor
课题研究目的和内容
大尺寸测量包括距离(或位移)测量、直线度测量和坐标测量。距离(或位
移)测量和直线度测量都是一维测量,而坐标测量(即空间测量)是三维测量,
是最复杂的,测量方法多种多样,测量仪器精度也各不相同。
激光干涉仪是目前世界上大范围位移测量精度最高的实用工具,激光跟踪干
涉仪即在激光干涉仪基础上加入伺服控制系统设计而得到。基于坐标法设计的坐
标测量系统,不需要精密导轨,测量范围很大,在测量时无需外部标准件对系统进行标定,单路测量系统即可完成测量工作。而激光干涉仪由于造价昂贵,使用复杂,在一些对于测量精度要求不高的场合未免有些大材小用,所以有必要研究一套即经济又便于操作的系统,实现这种场合的测量。
单激光目标跟踪系统是基于双激光目标跟踪系统而来,它是双激光目标跟踪系统的一部分。它的计算测量是基于三角形定位法而来。
三角形定位法是通过一条已知的边长L和对应的两个邻角α、β角,通过运算获得当前的坐标(x,y)。
单激光目标跟踪系统主要由一个单激光发射器,一个阵列激光接收靶,步进电机和一些相关无线发射和接收装置构成。它工作时,先由单激光发出光源打在激光靶上,确定位置,然后激光靶移动,这时光源不在原先确定的位置上了,由激光靶上面的无线发射器发射信号给无线接收端,再经由单片机处理后发送指令给步进电机,再由步进电机带动激光发射器,使光源打在原来确定的位置上,从而实现单激光目标跟踪原理。
单激光跟踪系统的任务是:通过研究合适的激光发射器和激光接收靶及固定机构,无线收发模块;整合成一套装置,这套装置能使接收靶随被测点在平面中运动时,激光发射器的测量光束始终能够跟踪测量接收靶的运动。具体来讲,跟踪系统就是要控制激光发射器的转角,使激光的测量光束发射到接收靶的中心,根据三角形定位法计算出目标的坐标,进行跟踪。
[资料来源:THINK58.com]

目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1
1 绪论………………………………………………………………………………1
1.1 国内外研究现状…………………………………………………………2
1.1.1 国外研究现状………………………………………………………2
1.1.2 国内研究现状………………………………………………………3
1.2 课题研究目的和内容……………………………………………………5
2 系统硬件电路的设计……………………………………………………………6
2.1 激光跟踪系统的总体设计………………………………………………6
2.2 激光接收靶控制电路设计………………………………………………7
2.2.1 基于AD转换与CD4051电子选通门的接收靶电路设计………7
2.2.2 基于74HC165与集成激光接收管的接收靶电路设计…………9
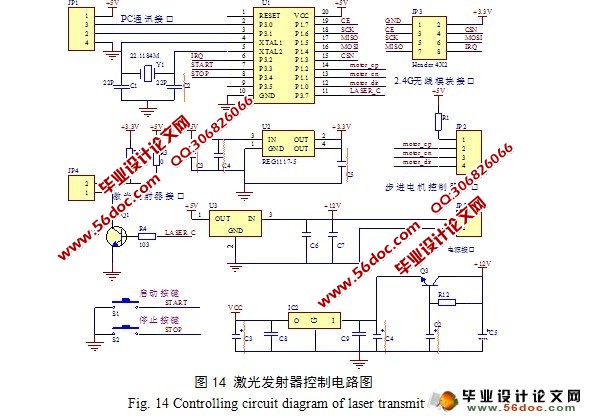
2.3 激光发射器控制电路设计………………………………………………10
2.4 步进电机控制电路设计…………………………………………………12
2.4.1 步进电机驱动器选择……………………………………………14
3 系统机械结构的设计……………………………………………………………14
3.1 激光接收靶机械设计……………………………………………………14
3.1.1 激光接收靶随动系统结构设计…………………………………15
3.2 激光发射器机械设计………………………………………………… 16
[来源:http://think58.com]
3.2.1 激光发射器水平调节机构设计…………………………………17
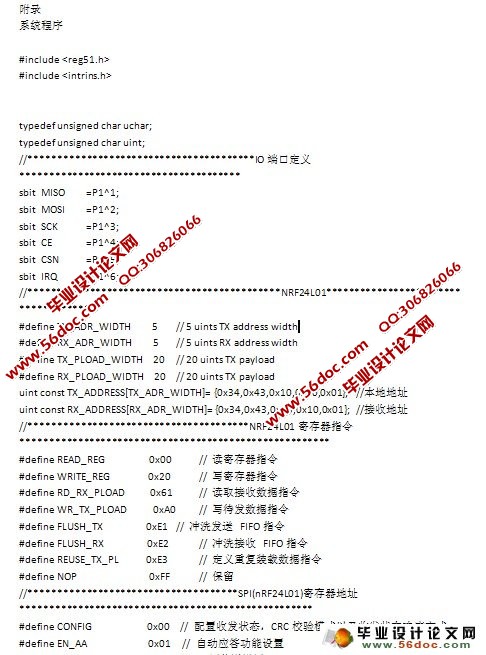
4 系统软件设计……………………………………………………………20
4.1 系统总体控制软件设计…………………………………………………20
4.2 激光发射器控制软件设计………………………………………………21
4.3 激光接收靶控制软件设计………………………………………………22
4.4 无线模块控制软件设计…………………………………………………22 [资料来源:THINK58.com]
5 总结………………………………………………………………………………24
参考文献……………………………………………………………………………25
致谢…………………………………………………………………………………26
[资料来源:THINK58.com]