
基于AVR单片机直流电动机伺服系统的设计

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于AVR单片机直流电动机伺服系统的设计(选题审批表,任务书,开题报告,中期检查表,论文说明书18000字)
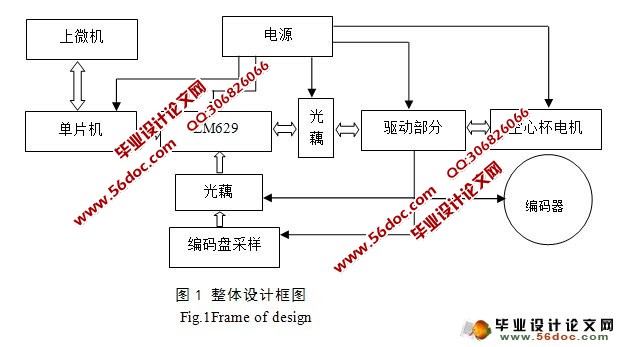
摘 要:本次的基于AVR单片机直流电动机伺服系统的设计是采用ATMEGA32L单片机作为主芯片,LM629作为辅助芯片,编码盘来采样的数据来组合成一个电机伺服系统。本系统有过流保护和负压的保护方式,能更好的保护整个系统,为了其他的用户能更好地对这个系统进行操作,本系统还设计了一个上微机系统,通过用VB语言写的上微机系统可以进行必要的参数修改和在线调试任务。
关键词:LM629;ATMEGA32L;伺服控制系统;
Design which is based on the motor serro system of AVR
Abstract: The design of a AVR Processor of DC decelerate motor servo control system is made up of ATMEGA32L which is first Processor, the LM629 which is the second Processor, code machine which sample the data. Then system have the way of protection of high current and low voltage.and also can change the necessary data and with the VB language system.
Key words:LM629;ATMEGA32L;servo control micro-system;
[来源:http://think58.com]
目 录
摘 要 1
关键词 1 [来源:http://www.think58.com]
1 前言 1
2 设计的研究内容与意义 2
3 总体方案的设计 2
4 LM629的功能和工作原理 3
4.1 LM629特性 3
4.2 DC电气特性 3
4.3 AC电气特性 4
4.4引脚定义 4
4.5工作原理 5
4.6运动轨迹参数 6
4.6.1 目标位置 6
4.6.2 采样周期 6
4.6.3 速度 6
4.6.4 加速度 6
4.6.5 运动控制字 6
4.7 PID参数 7
4.8 LM629状态和信息 7
4.9 LM629控制字 7
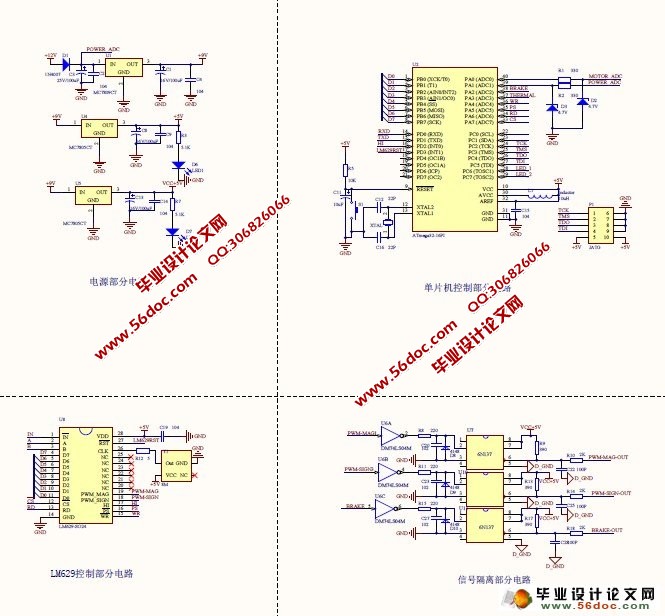
4.10 LM629控制部分电路设计 8
5 控制处理器设计 9
5.1处理器的选择 9
5.2 处理器与其它单片机相比较 9
5.3产品特性 9
5.4引脚配置图与说明 10 [资料来源:THINK58.com]
5.5 ATMEGA32结构方框图 12
5.6 单片机控制部分电路设计 13
6 驱动模块18200 13
6.1 18200工作原理 13
6.2 LMD18200引脚号定义 14
6.3 LMD18200驱动部分电路设计 15
7 其它硬件电路设计 16
7.1 电源部分电路设计 16
7.2 单片机复位电路设计 17
7.3 过流保护与欠压保护电路设计 17
7.4 AD模数转换LC 网络电路设计 18
7.5 串口通讯部分电路设计 18
7.6 LED提示电路设计 20
7.7 信号隔离部分部分电路设计 20
8 下微机软件设计 22
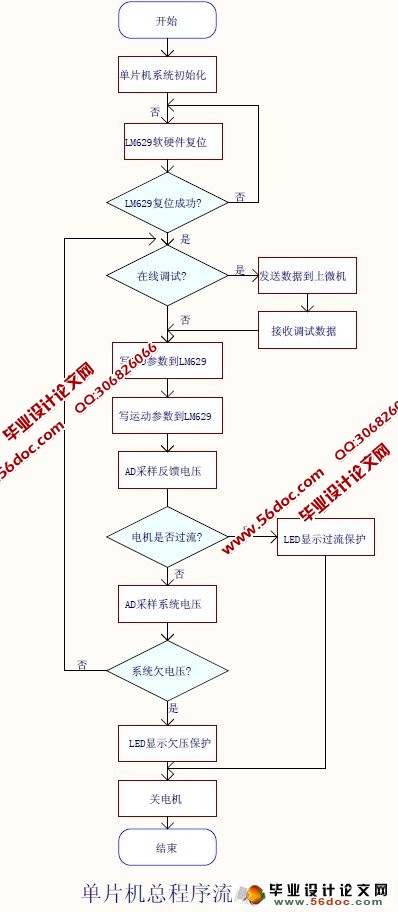
8.1单片机主程序流程图(见附录6) 22
8.2 AD模数转换程序设计 22
8.2.1 AD模数转换器寄存器的设置 22
8.2.2 数字滤波算法的选择 23
8.3 串口程序设计 23
[来源:http://www.think58.com]
8.4 定时器2溢出中断程序设计 24
8.5 单片机对LM629的控制程序设计 24
8.5.1 控制流程图 24
8.5.2 硬件复位与软件复位 25
8.5.3 读状态寄存器的程序设计 25
8.5.4 写命令的程序设计 26
8.5.5 写数据的程序设计 27
9 上微机软件设计 28
9.1 VB主程序流程图 28
9.2 VB串口通讯简介 28
10 系统调试 28
10.1 单片机在线调试 28
10.1.1 编程与仿真软件IAR EWAVR 4.20简介 28
10.1.2 单片机在线仿真的界面 29
10.2 VB界面调试 30
11 总结 31
参考文献 31
致 谢 32
附录 33 [版权所有:http://think58.com]