
关节式自动上下料机械手设计(PLC控制)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
摘 要
通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的关节式自动上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。具体进行了关节式机械手的总体设计,腰座结构的设计,关节式机械手手臂结构的设计,机械手腕部的结构设计,末端执行器(手爪)的结构设计,关节式机械手的机械传动机构的设计,机械手驱动系统的设计。同时对液压系统和控制系统进行了理论分析和计算。基于对机械手的控制系统进行了深入细致的设计,通过对机械手作业的工艺过程和控制要求的分析,设计了控制系统的硬件电路,同时编制了机械手的控制程序。设计达到了设计的预期目标。(毕业设计网 ) [资料来源:THINK58.com]
关键词:关节式机械手;PLC;液压伺服定位;电液系统
[资料来源:http://THINK58.com]
Abstract
[来源:http://www.think58.com]
Integrate the knowledge of the past four years’ of undergraduate course of Machine, discuss and analysis the each part and function of manipulator; design a kind of cylinderical coordinate manipulator used to pack and unload work piece for CNC machine tools. In particular, made the detailed design about base, arm, and end effector and the control system etc. including Total design, waist’s construction design, the arm’s construction design, the wrist’s construction design, the end effector’s construction design, and the drive system of manipulator. At the same time, analysis and compute the hydraulic pressure system and control system. Deeply design the manipulator’s control system, which based on PLC. After analysis about the craft process and the requests of the manipulator, the hardware circuit and the control program of the manipulator then is designed. In a word, the design of the manipulator has come to the anticipant object. [资料来源:http://THINK58.com]
Keyways: Manipulator;PLC;Hydraulic servo control;Electrohydraulic system
选题背景
关节式机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装 ,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。目前,关节式机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计是非常有意义的。 (毕业设计网 )
[资料来源:www.THINK58.com]
设计目的
本设计通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,完成一个特定功能、特殊要求的关节式自动上下料机械手的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
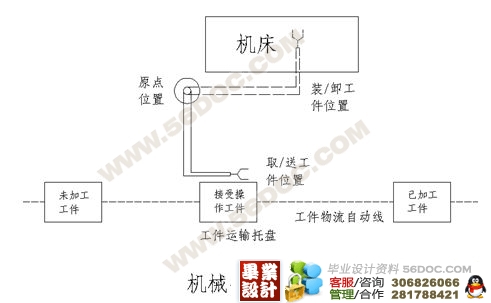
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。为了提高生产加工的工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,利用机器人技术,设计用一台装卸机械手代替人工工作,以提高劳动生产率。
本机械手主要与数控车床(数控铣床,加工中心等)组合最终形成生产线,实现加工过程(上料、加工、下料)的自动化、无人化。目前,我国的制造业正在迅速发展,越来越多的资金流向制造业,越来越多的厂商加入到制造业。本设计能够应用到加工工厂车间,满足数控机床以及加工中心的加工过程安装、卸载加工工件的要求,从而减轻工人劳动强度,节约加工辅助时间,提高生产效率和生产力。(毕业设计网 )
设计具体采用方案
具体到本设计,因为选用了液压缸作为机械手的水平手臂和垂直手臂,由于液压缸实现直接驱动,它既是关节机构,又是动力元件。故不需要中间传动机构,这既简化了结构,同时又提高了精度。而机械手腰部的回转运动采用步进电机驱动,必须采用传动机构来减速和增大扭矩。经分析比较,选择圆柱齿轮传动,为了保证比较高的精度,尽量减小因齿轮传动造成的误差;同时大大增大扭矩,同时较大的降低电机转速,以使机械手的运动平稳,动态性能好。这里只采用一级齿轮传动,采用大的传动比(大于100),齿轮采用高强度、高硬度的材料,高精度加工制造。(毕业设计网 )
[来源:http://think58.com]

目 录
摘要 Ⅰ
Abstract Ⅱ [来源:http://think58.com]
第1章 绪论 1
1.1 选题背景 1
1.2 设计目的 1
1.3 国内外研究现状和趋势 2
1.4 设计原则 3
第2章 设计方案的论证 3
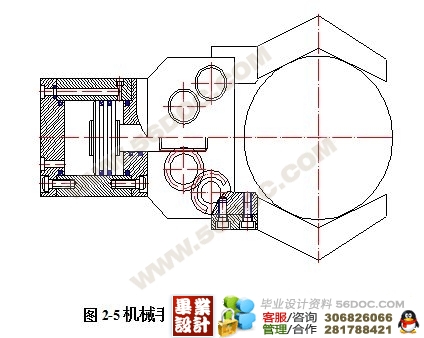
2.1机械手的总体设计 3
2.1.1 机械手总体结构的类型 3
2.1.2 设计具体采用方案 4
2.2机械手腰座结构的设计 5
2.2.1 机械手腰座结构的设计要求 5
2.2.2 设计具体采用方案 6
2.3机械手手臂结构的设计 7
2.3.1 机械手手臂的设计要求 7
2.3.2 设计具体采用方案 8
2.4工业机器人腕部的结构 9
2.4.1机器人手腕结构的设计要求 9
2.4.2设计具体采用方案 10
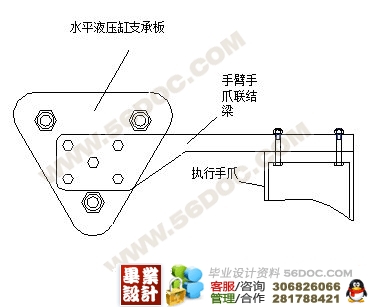
2.5机械手末端执行器(手爪)的结构设计 10
2.5.1机械手末端执行器的设计要求 11
2.5.2 机器人夹持器的运动和驱动方式 12
2.5.3机器人夹持器的典型结构 12
(毕业设计网 )
2.5.4设计具体采用方案 13
2.6机械手的机械传动机构的设计 13
2.6.1工业机器人传动机构设计应注意的问题 14
2.6.2工业机器人常用的传动机构形式 15
2.6.3 设计具体采用方案 18
2.7机械手驱动系统的设计 18
2.7.1机器人各类驱动系统的特点 18
2.7.2工业机器人驱动系统的选择原则 19
2.7.3机器人液压驱动系统 20
2.7.4机器人气动驱动系统 21
2.7.5 机器人电动驱动系统 23
2.7.6 设计具体采用方案 25
2.8机器人手臂的平衡机构设计 26
2.8.1 机器人平衡机构的形式 26
2.8.2 设计具体采用的方案 26
第3章 理论分析和设计计算 27
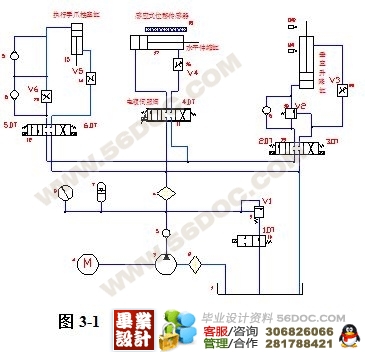
3.1液压传动系统设计计算 27
3.1.1 确定液压系统基本方案 27
3.1.2 拟定液压执行元件运动控制回路 28
3.1.3 液压源系统的设计 28
3.1.4 绘制液压系统图 29
3.1.5确定液压系统的主要参数 30
3.1.6 计算和选择液压元件 35
3.1.7 液压系统性能的验算 37
3.2电机选型有关参数计算 37
3.2.1 有关参数的计算 37
3.2.2 电机型号的选择 40
第4章 机械手控制系统的设计 41
4.1机械手控制系统硬件设计 41
4.1.1 机械手工艺过程与控制要求 41
(毕业设计网 )
4.1.2 机械手的作业流程 42
4.1.3 机械手操作面板布置 43
4.1.4 控制器的选型 45
4.1.5 控制系统原理分析 45
[资料来源:THINK58.com]
4.1.6 PLC外部接线设计 46
4.1.7 I/O地址分配 47
4.2机械手控制系统软件设计 49
4.2.1机械手控制主程序流程图 49
4.2.2机械手控制程序设计 49
技术经济分析 51
结论 52 [资料来源:http://www.THINK58.com]
专题部分 53
参考文献 64
附录1 66
附录2 71
附录3 78
致谢 94
[资料来源:http://think58.com]
[版权所有:http://think58.com]
上一篇:基于PLC的液位控制系统的设计
下一篇:金属粉末成型液压机PLC设计