
����PLC��Һλ����ϵͳ�����

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.���Ͻ���ѧϰ�ο�֮��.
�� �� ��
��Ϊ������ˮ�䣬�������ֳ������������ֱ���ơ�
ϵͳ���
1 ��ˮ��Һλ���Զ�����
����������п��Ƶ�����ˮ���Һλ��ϵͳԭ��ͼ��ͼ2-1��ʾ��������������У���1�ͷ�2������ˮ��ij�ˮ�����綯���ڷ���һ���Ŀ��������ƽ���ˮ���ˮ�����������ֶ���ͨ����ѹ�����������ĵ��ź������У�����A/D�任�������źţ���������PID�������У���PID�㷨����������D/Aת������綯���ڷ��������Ӧ�ĵ��ź�����綯���ڷ��п���ͨ���е�ˮ������
����ˮ���ҺλС���趨ֵʱ��ѹ�������������ź�С���趨ֵ���趨ֵ�뷴��ֵ�IJ����PID������������ƫ���źš������������������źŸ��綯���ڷ���ʹ�俪��������ʹͨ�����ˮ�����������ˮ����Ĵ�ˮ����Һλ���ߡ���Һλ���ߵ��趨�߶�ʱ���趨ֵ����Ʊ���ƽ�⣬PID������������ƫ���ź�Ϊ�㣬�綯���ڷ���ά�����Ǹ����ȣ�����Ҳ���䣬ͬʱˮ���ҺλҲά�ֲ��䡣
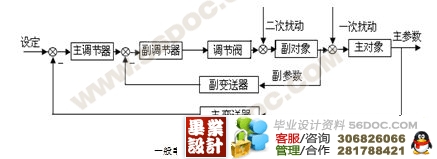
ϵͳ�Ŀ��ƿ�ͼ��ͼ3-1��ʾ������SPΪ�����źţ����û�ͨ��������趨��PVΪ���Ʊ��������ǵIJ���PID������������ƫ���źţ�����PLC��PID��������������������������źž���PLC��D/Aת����4~20mA��ģ����źź�������綯���ڷ��е��ڵ��ڷ��Ŀ��ȣ��Կ���ˮ��������ʹˮ���Һλ�����趨ֵ��ˮ���Һλ����ѹ�����������ת������صĵ��ź����뵽PLC������ӿڣ��پ���A/Dת���ɿ�����PV������ֵSP�������PV����PLC��CPU�ļ����������ƫ���ź�e ,�����뵽PID�������У��ֿ�ʼ���µĵ��ڡ�����ϵͳ��ʵʱ�ص���ˮ���Һλ�� [��Դ��http://www.think58.com]
2��ˮ����ˮ��Һλ��������ϵͳ
��ˮ����ˮ��Һλ����ϵͳ���ڿ��ƹ������Գ��ִ��ͺ���绷�����Ŷ��ϴ�Ҫ������ˮ����ˮ��Һλ������趨ֵ���üĵ��ջ��������Ʋ���ʵ�ֺܺõĿ���Ч�������Բ��ô����ջ�����ϵͳ��
��ˮ����ˮ��Һλ����ϵͳͼ��ͼ2-5��ʾ����ϵͳ�У���ˮ��Һλ��Ϊ�����������ڶ�����ˮ��Һλ��Ϊ�����������ڶ����ƿ�ͼ��ͼ2-6��ʾ��������Ŷ���Ҫ��ˮ��ij�ˮ�����Ŷ�����ʱ����Ϊ�����أ���ʱ�ǻ�е�����أ��Ŷ����Dz��ɱ���ġ�����·����·�����Ч�����ƻ������Ŷ���
�����ִ�л�����Ȼ�ǵ綯���ڷ���������PLC����PID�㷨��������Ŀ����Կ���ˮ�����ˮ��������������ˮ���ˮλ����������PID��·���ֱ���PID1��PID2��PID1Ϊ���������ˮ���Һλ���������ֵ��ΪPID2���趨ֵ��PID2������ˮ���Һλ��
Ӳ�����
ϵͳӲ������ư�����ⵥԪ��ִ�е�Ԫ�Ϳ��Ƶ�Ԫ����ƣ����ǻ�����ϵ�����һ��������ϵͳ��
��ⵥԪ
�ڹ��̿���ϵͳ�У������DZȽ���Ҫ��һ�����ڡ�Һλ��ָ�ܷ�������������Һλ�ĸߵͣ�ͨ��Һλ������֪�������е�ԭ�ϡ����Ʒ���Ʒ���������Ա���������������������ϣ�ʹ֮�ﵽ���ϵ�ƽ�⣬�Ӷ���֤��������˳�����С�������漰��Һλ�ļ��ͱ��ͣ��Ա�ϵͳ���ݼ�������������ͨ���е�ˮ����������ˮ���Һλ�� [��Դ��http://think58.com]
Һλ��������Ϊ����ʽ����ѹ��ʽ������ʽ��Ӧ��ʽ��������ʽ������ʽ��������ʽ�ȡ�ϵͳ���õ���Һλ���������㽭����п��Զ����DZ�����˾�������п��DZ�SP0018Gѹ�������������ھ�ѹ��ʽҺλ������������Ϊ0~10KPa������Ϊ ����24Vֱ����Դ���磬���Դ�PLC�ĵ�Դ�л�ã����Ϊ4~20mAֱ����
ִ�е�Ԫ
ִ�е�Ԫ�ǹ����Զ�����ϵͳ����ȱ�ٵ���Ҫ��ɻ��ڣ����������Ե��ڵ�Ԫ������źţ���ת����ֱ��λ�ƻ�ת��λ�ƣ��Ըı���ڷ�����ͨ������Ӷ�����������������ع��̵����ϻ�����ʵ�ֹ��̲������Զ����ơ�
ִ�����Ĺ���ԭ����ͼ ����ִ�л����͵��ڻ��������ڷ�����������ɡ�ִ�л������Ƚ����Ե��������ź�ת���������λ�ƣ��Ե��ڻ��������ڷ�������ִ�л�����������λ�ƣ��ı���ڷ��ķ�о���������ͨ������Դﵽ���յ��ڱ��ؽ��ʵ�Ŀ�ġ���ͼ �ɼ����Ե��������źž��ź�ת����Ԫת���ź���ʽ��������ִ�л�����λ�÷����źűȽϣ����źŲ�ֵ���뵽ִ�л�������ȷ��ִ�л������õķ���ʹ�С�������������λ�ƿ��Ƶ��ڷ��Ķ������ı���ڷ�����ͨ������Ӷ��ı䱻�ؽ��ʵ���������λ�÷����ź��������ź����ʱ��ϵͳ����ƽ��״̬�����ڷ�����ijһ���ȡ�
[������Դ��http://THINK58.com]
ϵͳ���õ��ĵ��ڷ���QS�����͵��ڷ������õ���ִ�л���Ϊ�綯ִ�л��������Ϊ���г̣�������ת�����綯ִ�л�������ɿ�ͼ�� [��Դ��http://think58.com]
����PLC��ģ�������DC4~20mA�ź�Ii��λ�÷����ź�If���бȽϣ����ֵ���Ŵ�����ŷ��綯����ת��ת���پ��������ı�������Ŀ��ȣ�ͬʱ������λ�ƣ���λ�÷�����ת���ɵ����ź�If����Ii=Ifʱ���綯��ֹͣת�������ڷ�����ijһ���ȣ���Q=KIi��ʽ��QΪ������ת�ǣ�KΪ�����������綯���ڷ����ṩ�ֶ������������ϲ��и��ֱ�������������һ����ϵͳ����ʱ�ɽ����ֶ����ƣ���֤ϵͳ�ĵ������á�
���Ƶ�Ԫ
���Ƶ�Ԫ������ϵͳ�����ࡣ��ϵͳ�У�PLC�ǿ��Ƶ�����Ԫ��������ѡ���ǿ��Ƶ�Ԫ��Ƶ���Ҫ���֡�
ϵͳӦ�õ���������S7-300ϵ�е�PLC����ṹ��ʹ�����������ά����������ģ�黯��ƣ���ϵͳ��Ҫ����CPUģ�顢ģ��������ģ�顢ģ�������ģ��͵�Դģ�顣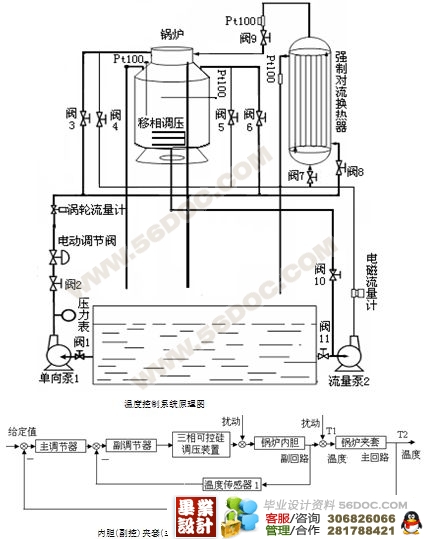
[��Դ��http://think58.com]
��һ�� �� �� 1
1.1 PLC�IJ��������弰��״ 2
1.2 ���̹�ҵ�����㷨��Ӧ����״ 3
�ڶ��� ��Ƶļ��������Ϳ��ƶ��� 6
2.1 ���̿���ʵ�����ϵͳ ����δ������ǩ��
2.2 ������PLC����ϵͳ 6
2.3 ���Ʒ������ 7
2.4.1 ��ˮ��Һλ���Զ����� 22
2.4.2 ��ˮ����ˮ��Һλ��������ϵͳ 23
������ ���Ʋ��ԵĽ��� ����δ������ǩ��
3.1 PID�����㷨 24
3.2 PID���Ʋ������� 16
3.5 ��������ϵͳ��Ӧ�÷�Χ 21
3.5.1 ��������ϵͳ 21
3.5.2���������ص㼰Ӧ�÷�Χ 22
�����
[1] �γ���.PLC��̼�Ӧ�ã���������е��ҵ�����磬 2002
[2] �����.�Զ���ϵͳ��������� ����������е��ҵ�����磬2001
[3] ���ٺ�.�ͼ�������Ƽ�������������е��ҵ�����磬2000
[4] ϯԣ��.Ԥ�����. ������ҵ������. 1993
[5] ���ǰ.Ԥ�����ϵͳ����Ӧ�ã���������е��ҵ������,2001
[6] �γ���.S7-300/400 PLCӦ�ü�������������е��ҵ������,2005
[������Դ��http://think58.com]
[7] ��־��.���̿������Զ����DZ�����������е��ҵ������,2003
[8] ���؟�����̫�ϡ������.������S7-300ϵ��PLC��Ӧ������STEP7�����ݣ�����������ѧ�����磬2004
[9] Ѧ���� .��������ϵͳ����������MATLAB����Ӧ��. �廪��ѧ�����磬2000
[10] ������.�Զ�����ԭ��. ��ѧ�����磬2001
[11] �ž۲ţ��ű���.PLCӲ��Ӧ�õ�ע������.�繤������1998��212��8����16-19
[12] S7-300/400ϵͳ�ͱ����ܲο��ֲ�
[13] �����������ꡢ��Ԫ������ƽ.PLC���¶ȿ���ϵͳ�е�Ӧ�ã������DZ�ѧ����2001��22��4����470-472
[14] WinCC�ֲ�
[15] �����䡢�ߺ��.PLC���������Ӧ�ã����������ӹ�ҵ������ ��2004
[16] ��Ԫ�ܣ������պ�ҵ���ҽ����������Ƶ�PID�����������㷨����������ߣ�1996��11��5����580-583
��һƪ��������PLC�IJ������ֱ�ӿ���(S7��200)
��һƪ���ؽ�ʽ�Զ������ϻ�е�����(PLC����)