
基于FPGA和MCU的伺服电机控制器设计(论文)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
摘 要
本文首先对通用伺服控制平台项目做了整体的设计规划,并着重分析了基于FPGA的电机接口模块的设计和核心算法,给出相应的接口电路,并对等精度算法和设计思路在ALTERA QUARTUS 9.0的环境下进行了仿真,在实验电路上进行了测试。主要目的在于研究出一款高性能的基于FPGA的伺服电机接口模块。
关键词:伺服控制平台 FPGA 等精度算法 电机接口模块
THE DESIGN OF FPGA+MCU BASED SERVO
MOTOR CONTROLLER
ABSTRACT
This first general-purpose of this dissertation is the overall project design and planning for the servo control platform, and also it analyzed the core algorithms for the FPGA based interface design. Given a appropriate interface circuit ,An equal precision algorithms designed with FPGA is introduced.It adopts Verilog Hardware
Description Language to implement in servo motor interface modules ,and adds pulse width measurement on the base of traditional frequency measurement, and the HDL was simulated in the ALTERA QUARTUS 9.0 environment. Intended to design a high-performance FPGA-based servo motor interface module. [资料来源:http://www.THINK58.com]
Keywords:servo control platform FPGA equal precision algorithm servo motor interface module
伺服电机简介
一个伺服电机内部一般包括一个直流电机、一组变速齿轮组、一个反馈可调电位器以及一块电子控制板。其中,高速转动的电机提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出。齿轮组的变速比越大,伺服电机的输出扭力也越大,也就是说越能承受更高的负载,但转动的速度也相应越低。
伺服电机工作原理
伺服电机是一个典型闭环反馈系统,减速齿轮组由电机驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动电机正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服电机精确定位的目的。 [来源:http://think58.com]
目 录 12000字
摘要
ABSTRACT
1引言 ……………………………………………………………………1
1.1项目背景 ……………………………………………………………1 [资料来源:http://www.THINK58.com]
1.2研究意义 ……………………………………………………………1
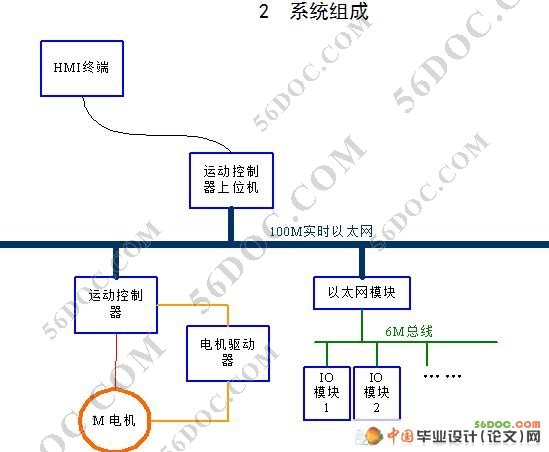
2 系统组成………………………………………………………………2
2.1 运动控制器 …………………………………………………………2
2.1.1 MCU功能 …………………………………………………………2
2.1.2 FPGA功能 …………………………………………………………2 [资料来源:http://think58.com]
2.1.3光电隔离模块功能 ………………………………………………2
2.2伺服驱动器 …………………………………………………………2
2.2.1常用伺服驱动器简介 ………………………………………………2
2.3伺服电机………………………………………………………………3
2.3.1伺服电机简介………………………………………………………3
2.3.2伺服电机工作原理…………………………………………………4 [资料来源:www.THINK58.com]
2.3.3伺服电机的控制……………………………………………………4
2.4HMI ……………………………………………………………………4
2.5控制器上位机部分……………………………………………………4
2.5.1上位机功能…………………………………………………………4
2.6以太网模块……………………………………………………………4
2.6.1以太网模块功能……………………………………………………4
3 FPGA接口模块详细介绍………………………………………………5
3.1实现功能………………………………………………………………5
3.1.1 速度控制模块 ……………………………………………………5
3.1.2 位置控制模块 ……………………………………………………5
3.1.3 CPU接口模块 …………………………………………………………6
3.2速度与位置检测算法讨论………………………………………………6
[资料来源:http://THINK58.com]
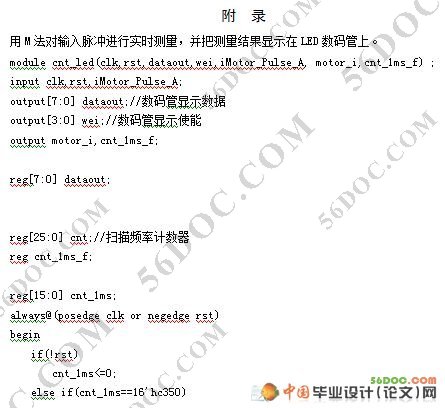
3.2.1M法……………………………………………………………………6
3.2.2T法…………………………………………………………………6
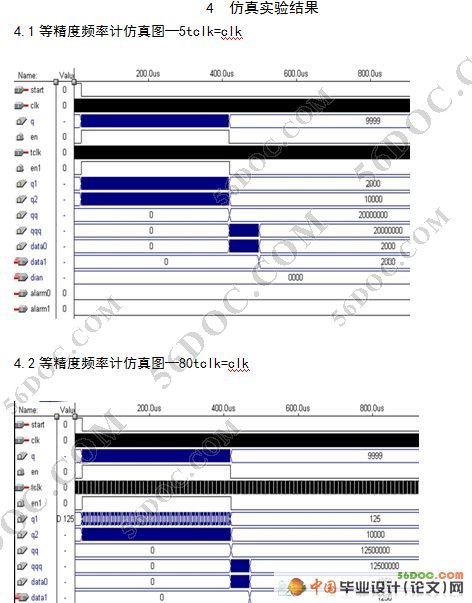
3.2.3等精度测频算法……………………………………………………6
3.2.4高精度数字测速算法………………………………………………9
3.3速度与位置控制算法…………………………………………………20
3.4硬件部分…………………………………………………………………14
3.4.1ALTERA FPGA介绍 ……………………………………………………14
3.4.2FPGA硬件部分 ………………………………………………………14
3.4.2.1电源及晶振部分 …………………………………………………14
3.4.2.2内存及FLASH ……………………………………………………15
3.4.2.3主芯片……………………………………………………………15
3.4.2.4JTAG下载…………………………………………………………16
[来源:http://think58.com]
3.4.3输入输出光电隔离…………………………………………………17
3.4.3.1输入光电隔离模块………………………………………………17
3.4.3.2输出光电隔离模块………………………………………………18
3.5软件部分 ………………………………………………………………18
3.5.1 verilog HDL编程语言介绍 ………………………………………18
3.5.2输入输出端子定义……………………………………………………18
[资料来源:http://www.THINK58.com]
3.5.3寄存器定义…………………………………………………………19
3.5.4FPGA架构………………………………………………………………20
3.5.5主要模块介绍 ……………………………………………………20
4 仿真实验结果 ……………………………………………………………22
5 应用案例 …………………………………………………………………24
[资料来源:THINK58.com]
6 结论 ………………………………………………………………………26
谢辞
参考文献
附录 [资料来源:http://THINK58.com]