
�Զ�Ŀ���ټ��ⷢ��װ��ϵͳ���

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.���Ͻ���ѧϰ�ο�֮��.
�� �� ��
�Զ�Ŀ���ټ��ⷢ��װ��ϵͳ���(����ѡ��������,������,���ⱨ��,��ҵ����14000��)
ժ Ҫ����Щ�������ⶨλ�����õ��˳���ķ�չ��������ߵ�ɫ�ԡ��߷����ԡ�����Ժã������������λ�ֶεĶ������ƣ��Ѿ���Ϊ��λ�������治�ɻ�ȱ�Ĺ��ߡ��Զ�Ŀ���ټ��ⷢ��װ����ң��С����Ӧ�����Ǹ�����Ҫ�Ļ��ڣ�ͨ�����ⶨλ�����Եó�ң��С����λ�����ꡣ����ң��С��������ǰ��ͻ�������ͬ�Ļ����д��ڲ�ͬ��״̬�����䶨λ�����ݻ�����ͬ���ı䣬������Ҫ����Χ����������Ӱ�����ؽ��з����������λ�����������������뿼�Dz��������У����
�ؼ��ʣ����⣻��λ���������
Design of Laser for Automatical Object Tracking System Launcher
Abstract: The laser positioning technology has got considerable development in the last few years because of the high monochromaticity , high directionality, good coherence, comparing with the unique advantage to the means of other position, and has already become an indispensably tool in positioning technology. Automatic target tracking laser transmitter applicated in remote car is a very important part of laser positioning, position coordinates of remote control car can be drawn. This is the premise and foundation of a remote control car. There are different states followed by different environments, that the positioning error changes according to different environment, so all the factors influenced by the surrounding environment will be analysis. Positioning error is more than the error allowed by the system, it must be considered and corrected. [��Ȩ���У�http://think58.com]
Keyword: laser; position ; stepping motor
����ṹ���
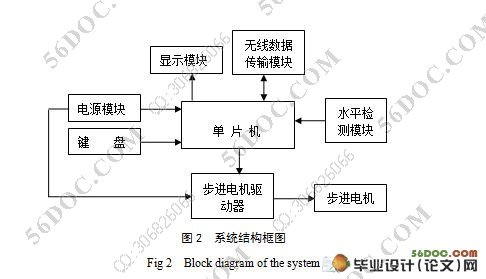
����װ���ɵ�Ƭ�����������������������������������ݴ���ģ�顢ˮƽ���ģ�顢��Դģ�顢��ʾģ��ȼ�������ɡ����õ�Ƭ�����Ʋ�������������������������ת�����������ݴ���ģ��ͨѶ����Դģ���ṩ��Դ�����������������������оƬ�������������ݴ���ģ������С����������ͨѶ���ṹ��ͼ��ͼ2��ʾ��
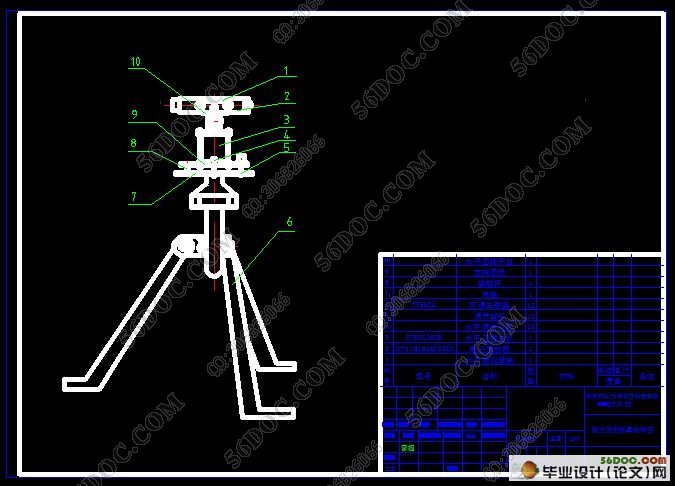
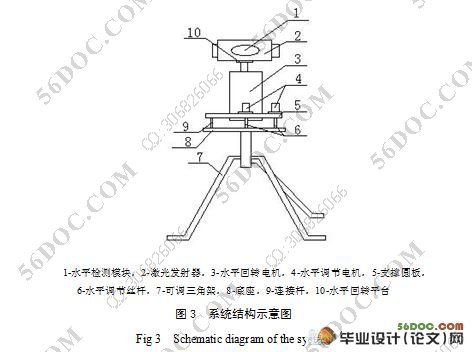
����ϵͳ�̶��ڸ߶ȿɵ������Ǽ��ϣ����ⷢ������װ��ˮƽת��ƽ̨�ϣ�ˮƽת��ƽ̨ͨ��ˮƽ��ת����Ĵ���������ˮƽ��������ת������ˮƽ��ת����Դ���ˮƽ��ת�ǶȲ���ģ����Բ���ˮƽ��ת�Ƕȣ����ڼ��㼤����������ڵ�����——����С����λ�����ꡣˮƽ��ת�����ˮƽ���ڵ����֧��Բ��̽ӣ�֧��Բ��͵�����ͨ��һ�����Ӹ˺Ͷ���˿�����ӵģ������˷ֲ�����Բ���Բ��Ϊ���ĵĵȱ������ε����������ϣ��������Ӹ��¶˺͵����̽ӣ��϶˺�֧��Բ��½ӣ�˿���¶������ͨ���������ӣ��϶���ˮƽ���ڵ������̽ӡ����Ʋ��ֵ�ˮƽ��ת�����ˮƽ���ڵ������ͨ���߾��Ȳ�������͵�Ƭ��ʵʩ���Ƶġ�
���������������£�
(1) ˮƽ���ģ�飺��⼤�ⷢ��װ���Ƿ�ˮƽ���ѷ������Ҫ���ˮƽ���⡣ [������Դ��THINK58.com]
(2) ���ⷢ���������伤�⣬�Ա㼤����������պ�ʵ�ֶ�λ��
(3) ˮƽ��ת���������ˮƽ��תƽ̨ת����ʵ�ַ��䲻ͬ�Ƕȵļ��⡣
(4) ˮƽ���ڵ��������˿����ת��
(5) ֧��Բ�壺����֧��ˮƽ���ڵ����ˮƽ��ת�����
(6) ˮƽ����˿�ˣ��������ڼ��ⷢ������ˮƽ��
(7) �ɵ����żܣ��ɵ��ڼ��ⷢ��װ��ˮƽ��߶ȡ�
(8) ������������������װ�á�
(9) ���Ӹˣ����ӵ�����֧��Բ�塣
(10) ˮƽ��תƽ̨����װˮƽ���ģ��ͼ��ⷢ�����Ļ�תƽ̨��
�����������������װ�䣬����ʵ���ͼ4��ʾ��
2.�о����ݺͷ���
1������̶�ƽ̨��ƣ�
2��������תƽ̨��� ��
3����̶�ƽ̨��� ��
4���ⷢ������ת���ơ�
�о��Զ�Ŀ���ټ��ⷢ��װ�õ����巽��——������������֤�D�D�������Ҫ��ѡ�����Ԫ����——��Ƶ���̶�ƽ̨��������תƽ̨����̶�ƽ̨�D�D��ɼ��ⷢ������ת���Ƶ����——��������——��������——�����Ľ� [��Դ��http://think58.com]
[������Դ��THINK58.com]

Ŀ ¼
ժҪ............................................................... 1
�ؼ���............................................................. 1
1 ǰ��............................................................. 2
1.1 ѡ�ⱳ��..................................................... 3
1.2 �Զ���Ŀ�꼤�ⷢ��װ�õ��о�����........................... 3
1.2.1 ���������ھ��������ϵ�Ӧ��............................. 3
1.2.2 ���������ڹ�ҵ�����ϵ�Ӧ��............................. 3
1.2.3 ����������ң��С����Ӧ��............................... 3
1.3 �Զ���Ŀ���о���״......................................... 4
2 �������㶨λԭ��..................................................4
3 ϵͳ�ṹ���..................................................... 6
3.1 ����ṹ���................................................. 6
3.2 ���ⷢ������ѡ��............................................. 8
3.3 ���������ѡ��............................................... 9
3.3.1 ����..................................................... 9
3.3.2 ����ԭ��................................................. 9
3.3.3 һЩ��������.............................................10
3.3.4 ��������ϵͳ���........................................ 10
3.3.5 ���������ѡ��.......................................... 11
3.4 ��Ƭ����ѡ��................................................ 12
3.4.1 ����.................................................... 12
3.4.2 ��Ƭ����ѡ��............................................ 12
3.5 ������......................................................14
4 ϵͳӲ���������................................................14
4.1 ϵͳӲ�����................................................ 15 [������Դ��http://www.THINK58.com]
4.2 ϵͳ�������................................................ 16
4.2.1 ˮƽ���ڵ���Ŀ��Ƴ���.................................. 16
4.2.2 ˮƽ��ת����Ŀ��Ƴ���.................................. 16
4.2.3 ���ݲɼ����͵Ŀ��Ƴ���.................................. 17
4.3 ������.................................................... 18
5 �㷨�о���������.............................................. 19
5.1 �������㷨................................................ 19
5.2 ��Ƭ������������.......................................... 20
5.3 ������.................................................... 23
6 ʵ����֤����.................................................. 23
6.1 ʵ�鷽��.................................................... 23
6.2 �������㾲̬��λʵ������.................................... 24
6.3 ������.................................................... 26
7 ����ܽ�........................................................ 26
����� ......................................................... 27
��л...............................................................28
��¼...............................................................28
��һƪ�����Դ�������λϵͳ�о�
��һƪ��������̫����ˮ�õ����