
���Դ�������λϵͳ�о�

1.����ע���¼,֧��������ʾ�������ɻ�ȡ������.
2.��������ҳ���ܵ�Ϊ,���غ���ˮӡ.���Ͻ���ѧϰ�ο�֮��.
�� �� ��
���Դ�������λϵͳ�о�(����ѡ��������,������,���ⱨ��,���ڱ���,��ҵ����16000��)
ժ Ҫ�����ũ�û�е�ر����Ϸ�ˮ�������е��������ҵ�ж�λ�ѡ��Ƶ����Ȳ��ߵ������Ϊʵ���䶨λ�����Զ����̶ȸߵ�Ҫ���������AT89C51��Ƭ��Ϊ���봦�����ͻ�������PID�Ŀ����㷨�Ĺ��Դ�������λϵͳ����ϵͳͨ���������̺������ǽ������ݲ�����Ȼ��ִ������PID���ƣ��������������ִ�л��������˵�ͨ�ϣ��Ӷ�ʵ�ֶ���ҵ��е��ȷ��λ�Ŀ��ơ�������������ù��Զ�λϵͳͬ��Ƭ��������PID�����㷨���ʹ�ã������ϵͳ�Ķ�λ���ȣ��ﵽ�Ϸ�ˮ�������еС�����ҵ�Ķ�λҪ��
�ؼ��ʣ���λ���������̣������ǣ���Ƭ����PID
Inertial Sensor Positioning System Research
Abstract: Referring the situation of agricultural machinery, especially southern paddy field farming machinery, having difficulty in positioning and low precision in control, to realize its high precision positioning and high-degree- automation demand, this paper introduce a orientation system of inertia sensor based on the central processor singlechip AT89C51 and digital PID control method. This system samples date through photoelectricity-coding-disk and gyroscope, then carries on a PID control,meanwhile,outputs the control quantity to adjust the angle of flow of administer-machine controlled. Thus the system control precision positioning. The results shows that the orientation system of inertia sensor can increase the precision of positioning of system and achieve the positioning demand of southern paddy field farming machinery small areas of work,through the singlechip and digital PID control method used in combination.
[������Դ��THINK58.com]
Key words: positioning; photoelectricity-coding-disk; gyroscope; singlechip; PID
1.�о�Ŀ��
�о�����Ƴɱ����͡��������õĹ��Դ�������λϵͳ��
2�о����ݺͷ���
1) ���ٶȼ�ѡ�ģ�
2) ���ٶȴ����������ݣ�ѡ�ģ�
3) ��������˫���������IMU�����Բ�����Ԫ����
4) ��AHRS�������Ŵ���������̬�ο�ϵͳ����
5) ����Ӳ����Ԫ��·��ƣ�
6) ������Ԫ����������ơ�
�����г��Ϲ��Դ���������ȱ��——�о����Դ����������巽��——������������֤�D�D�������Ҫ��ѡ����Դ�����оƬ������ƴ洢��������ͨ�ŵ�·��Ӳ����·�D�Dϵͳ�������——��������——��������——�����Ľ�
3.1 ϵͳ��ܽṹ���
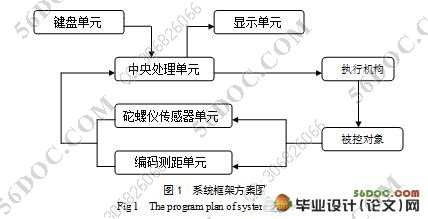
���Դ�������λϵͳ����Ӳ����·��������Ʋ��֡�Ӳ����·������Ҫ�������봦����Ԫ�������Ԫ�������Ǵ�������Ԫ��ִ�е�Ԫ�����̵�Ԫ����ʾ��Ԫ�ȡ��ɱ����Ԫ�������Ǵ�������Ԫʵʱ�Ի�е���ٶȡ�λ�ƺͺ��������Ϣ�ɼ�����ת��������ݴ������봦���������봦�������з���������ͨ������PID�����㷨��ָ������ִ�л������л�е���н����ƣ�������ʾ��·����������ʾ��
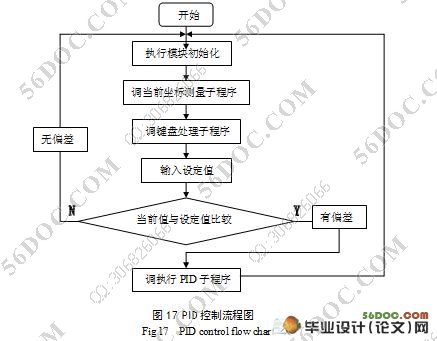
����������Ҫ�����Ϣ�ɼ�������AT89C51��Ƭ���Ա�����ͽ��ٶȴ����������ǵ�������ݽ��з��������ó������ݽ�����趨ֵ���бȽϣ�����PID�����㷨��ִ�л���ʵ�ֿ��ƣ���֤��λ���ȡ�
3.2 ��λ����ƽ̨�ṹ���
��ʽ�����ж��ֽṹ��ʽ�����õ������ֳ��������ֳ�������Ƚ϶��ԣ����ֳ����ṹ���ӣ�����������ڳ������Ա���Ʋ������Ƶ�ǰ����������ת�������С�����������о���
����ͼ2��ʾ������С��ʵ��ͼ�������õ�С��Ϊǰ��������ת���ƶ��������涯�͡�����С���ɳ��ܺͿ�������ɣ����������ְ������봦����Ԫ����������Ԫ��ִ�е�Ԫ�����̺���ʾ��Ԫ�ȡ�
[������Դ��http://THINK58.com]

Ŀ ¼
ժҪ…………………………………………………………………….….................I
Abstract…………………………………………………………………….….........II
1����………………………………………………………………….….................x
1.1ѡ�������Լ�ѡ������……………………………….………….……….x
1.1.1 ѡ������……………..……………………………………………….x
1.1.2 ѡ������……………..……………………………………………….x
1.2�������о���״����չ����………………………………...………..…...x
1.2.1 �����о���״����չ����…………………….………...……….…...x
1.2.2 �����о���״����չ����…………………….………...……….…...x
1.3 ��������о����ݡ������Լ�Ԥ�ڳɹ�……………………………..….x
[������Դ��http://www.THINK58.com]
1.3.1 �о�����…………………………………………….……….…….….x
1.3.2�о�����……………………………………………..………….….….x
1.3.3 Ԥ�ڳɹ�…....……………………………………...………………….x
2 ǰ��…………………………………………………………….….…x
2.1�о�������˼·………………………………………………...…………..
[������Դ��http://www.THINK58.com]
3 ���巽�����………………………………………………………......…….x
3.1 ϵͳ���……………………………………...………..…...x
3.1.1 ϵͳ��ܽṹ���………………………………………...…..x
3.1.2 ��λ����ƽ̨�ṹ���…………………..…….…..………....…....x
4 ��λԭ�����…………………………………………………….………..…….x
4.2�����̲��……………………………………………………..….…...x
[������Դ��http://THINK58.com]
4.2.1 �����̲���ԭ�����…………………..……………………..…..x
4.2.2 �����̲���ѡ������ݷ���..……………………………….....x
4.3�����Dz�Ƕ�………………………………………….……………..….…..x
4.3.1 �����ǵķ����ԭ��………………………………………….….……x
4.3.2 �����Dz�Ƕ�ԭ��……………………………………………….….…x
4.3.3 �����Dz�Ƕ���������ݷ���…………………………….………x
5 �����������……………………….…………………………….….…x
6 Ӳ���������……….……...…………......……………………..…...x
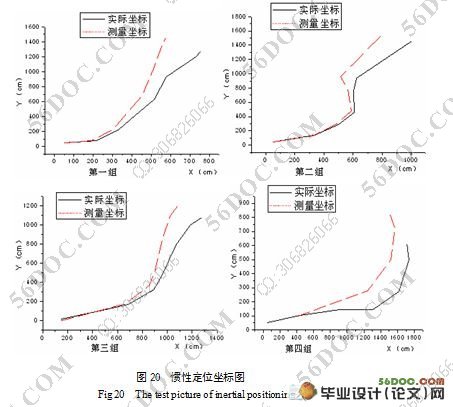
7 ���Զ�λ��������ݷ���………..………….....…….x
����…………………………………………………………………………...……...x
�ο�����………………………………………………………………...…...………x
��л……………………………………………………………………...…...………x
��¼…………………………
��¼
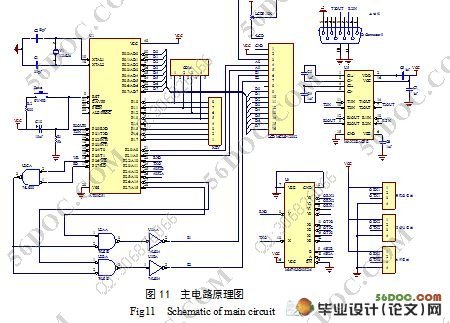
��¼1������·ԭ��ͼ
��¼2��������ģ���·ԭ��ͼ
��¼3��������ģ���·ԭ��ͼ
��¼4��ִ��ģ���·ԭ��ͼ
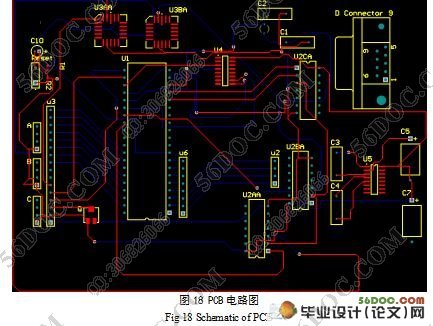
��¼5����·PCBͼ
[������Դ��http://www.THINK58.com]