
小型纯电动代步汽车总体设计(含CAD零件图装配图,STP,CATIA三维图)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
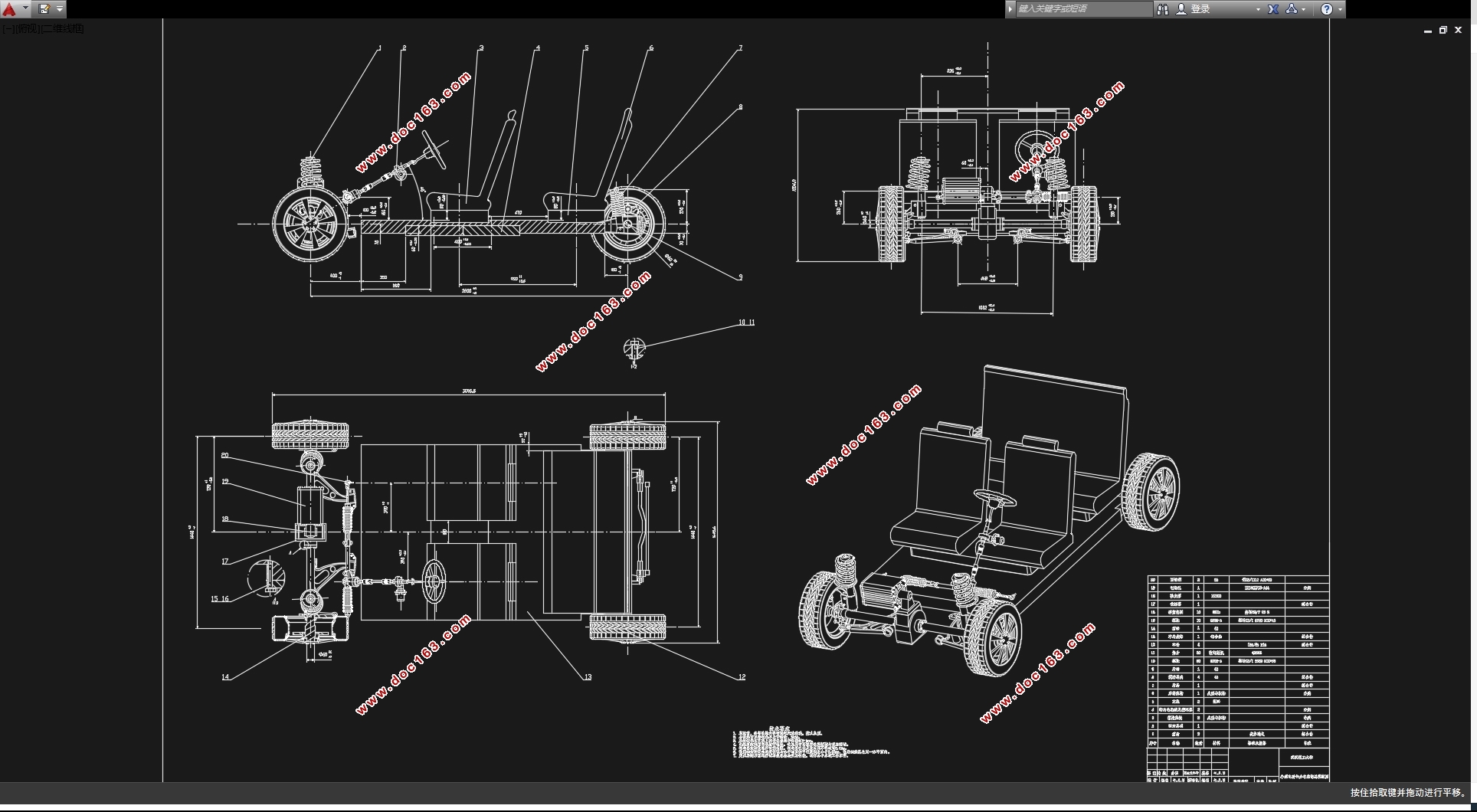
小型纯电动代步汽车总体设计(含CAD零件图装配图,STP,CATIA三维图)(任务书,开题报告,文献摘要,期刊综述,期刊综述英文版,外文翻译,论文说明书18000字,论文说明书英文版11000字,CAD图4张,CATIA三维图,STP三维图)
摘 要
在全球石化能源面临枯竭的背景下,世界各国开始寻找适合本国的新能源产品以优化能源结构、面对能源和环境危机。这样的市场环境为新能源汽车,尤其是纯电动汽车提供了良好的发展机遇。
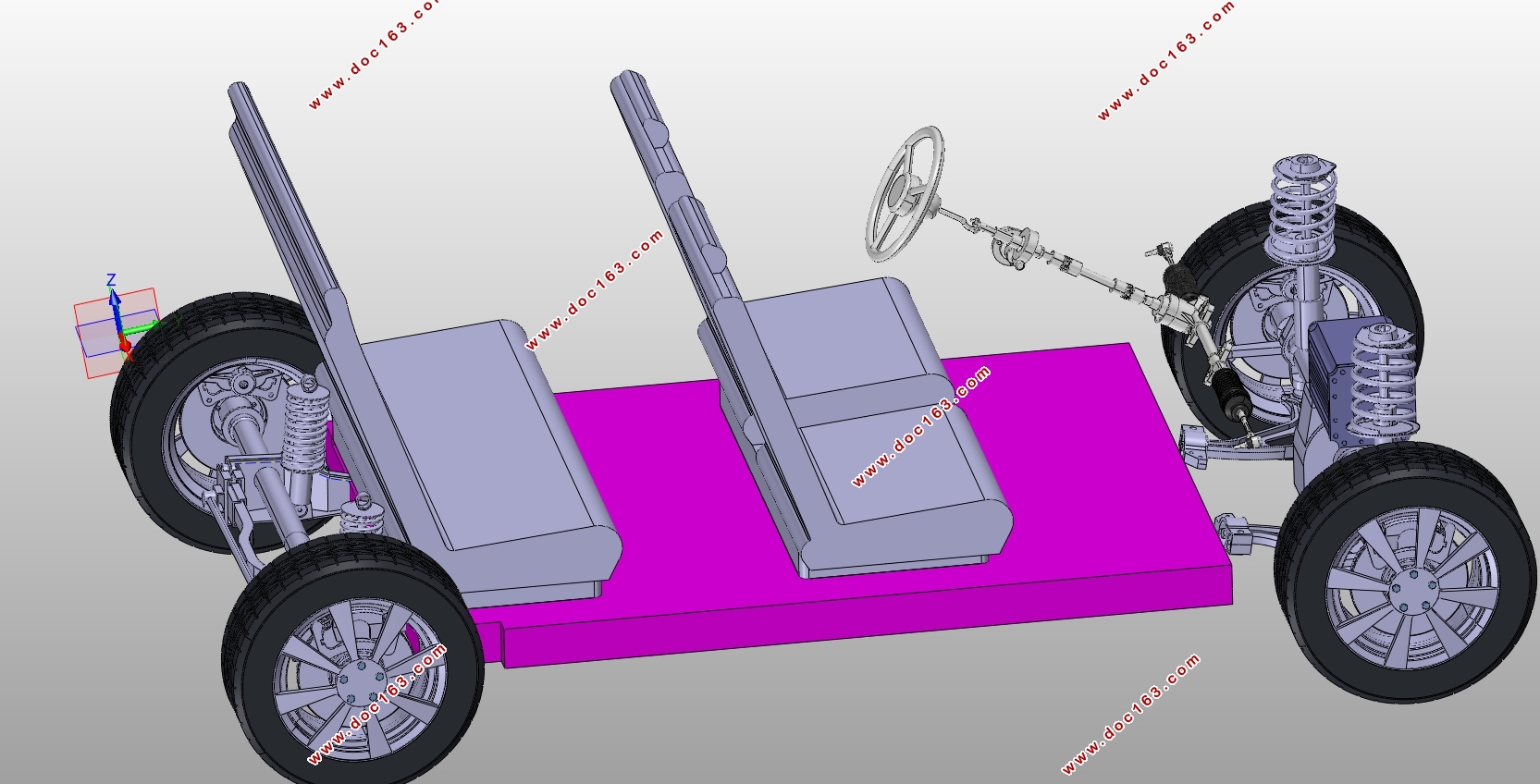
本文以市场对纯电动汽车的需求和纯电动汽车应对交通拥堵和节能减排方面的优势出发,确定了一款用于城市正常出行用的小型纯电动代步汽车作为设计对象。参考市场上成熟的小型车产品的整车参数和布局方式,综合代步需求和国家对纯电动汽车使用的技术要求,确定了小型纯电动汽车的前置前驱的布局方案以及整车的动力性、经济性要求。
根据电动汽车动力驱动系统的设计流程,考虑已有的纯电动汽车的整车参数和动力性、经济性指标,完成对设计的小型纯电动汽车的驱动电机的选型和匹配。再凭借电动机最高转速和车辆最高车速的对应关系以及电动机输出转矩和车辆的动力性能的对应关系完成电动汽车传动系统的设计工作。完成传动系统设计后,可以顺利建立电动机的能量需求和动力电池的能量的匹配关系,进一步完成动力电池组的选型和匹配。
[来源:http://think58.com]
将建立的驱动电机系统和动力电池系统的参数代入理论计算公式进行电动汽车整车性能的验算。进一步确定电动汽车的整车设计参数,依据整车设计参数建立设计的小型纯电动汽车的数据模型。使用ADVISOR软件对电动车数据模型进行纽约城市道路工况和等速50km/h工况下的电动车性能仿真,得到仿真的动力性能和经济性能于理论验算结果相比较,论证设计方案的合理性与可行性。
关键词:小型纯电动代步汽车;总体设计;驱动电机系统匹配;动力电池组匹配;ADVISO仿真
Abstract
Under the global petrochemical energy depletion, the world began to find suitable new energy products to optimize national energy structure and face the challenges of energy and environmental crisis. This demand provides a good opportunity for new energy vehicles, especially pure electric vehicles , to developing in market.
According to the market demand for pure electric vehicles and advantages of pure electric vehicles in reducing traffic congestion, saving energy and decreasing emission, this paper chooses a micro pure electric ferry with a normal travel abilities in the city as a design object. Reference to the market mature small car products’ vehicle parameters and layout and the national technical requirements of pure electric vehicles, this paper has determined dynamic and economic requirements of the micro pure electric vehicle with front-wheel-drive layout.
[来源:http://www.think58.com]
On the basis of the design process of electric vehicle drive system, this paper completes the design of micro pure electric vehicle driving motor selection and matching considering the existing pure electric vehicle parameters and dynamic, economic indicators. Next, this paper completes the drive system design of the electric vehicle with the corresponding relationship between the maximum speed of the motor and the maximum vehicle speed and the corresponding relationship between the motor output torque and vehicle dynamic performance. Finally, you can successfully establish the relationship between the energy requirements of the motor and the battery power, and further complete the power battery selection and matching with the completion of the transmission system design.
Established drive motor system and power battery system parameters can be used into the theoretical formula for electric vehicle performance checking. Due to determined vehicle design parameters, a data model of the micro pure electric vehicle can be established. Using the ADVISOR software to simulate dynamic and economic performances of the electric vehicle in the New York city road condition and in the constant speed 50km / h condition, the dynamic performance and the economic performance of the simulation are compared with results of the theoretical calculation to evaluate the scientific features and feasibility of the micro vehicle design.
Key Words:micro pure electric scooter;vehicle overall design;motor system matching; battery system matching; simulation with ADVISOR
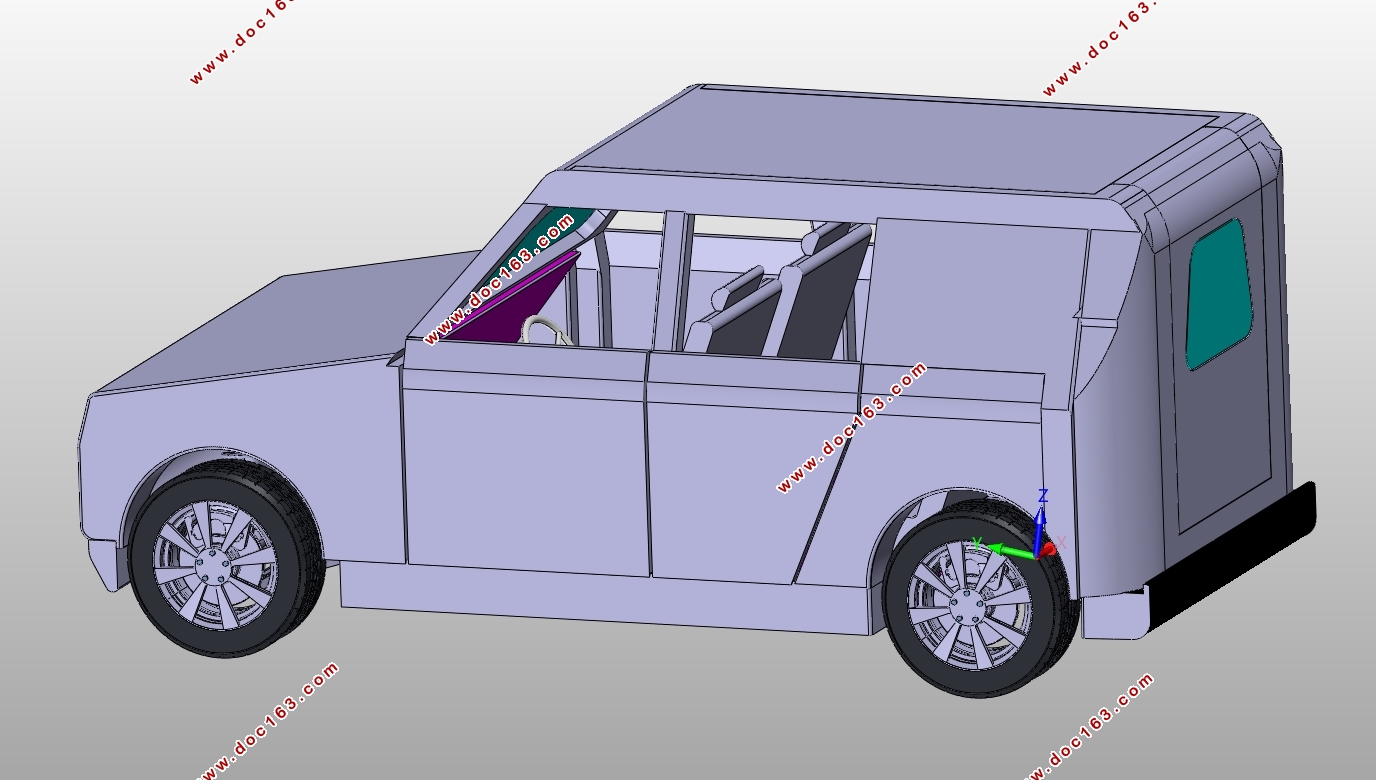
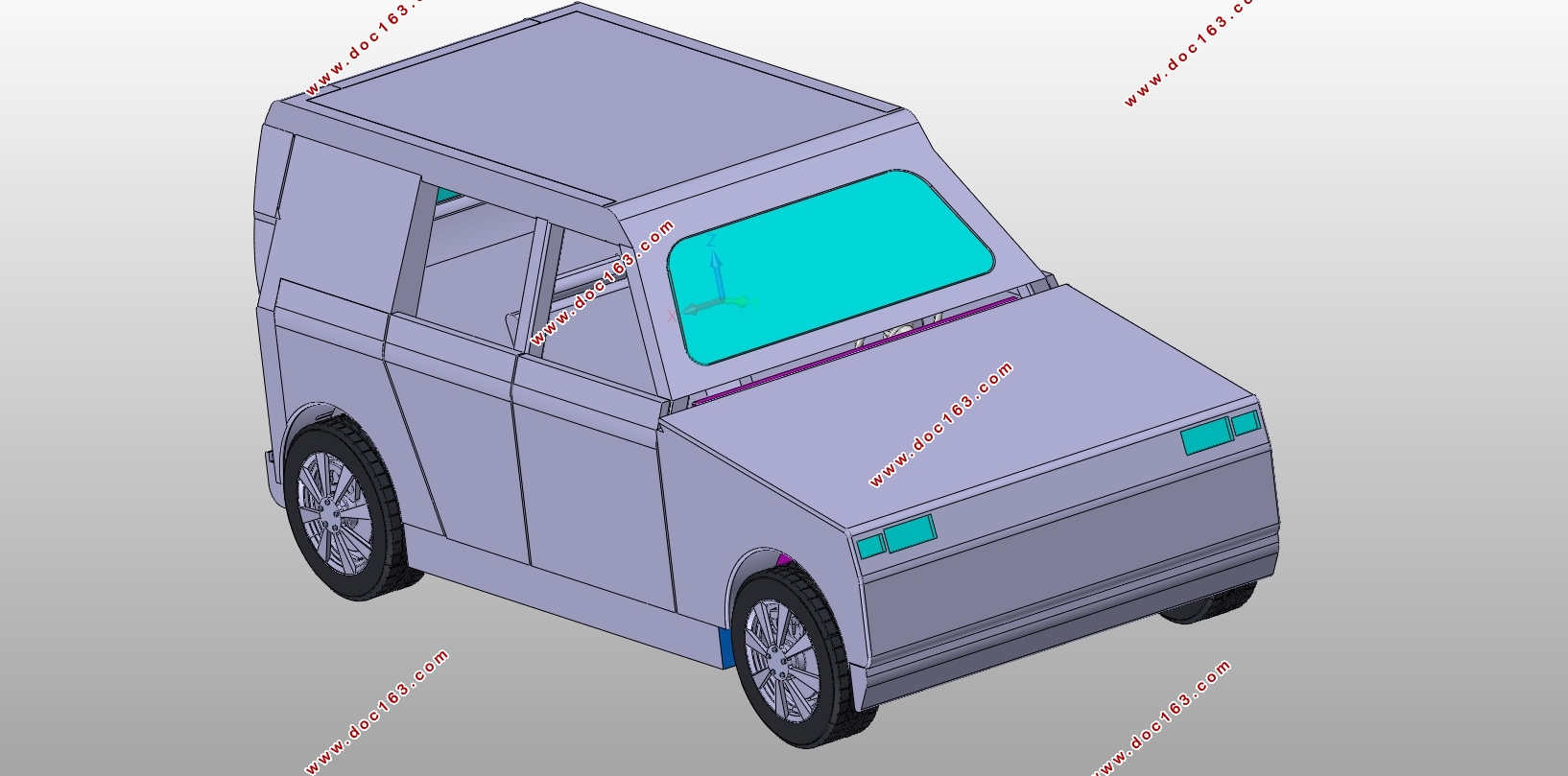
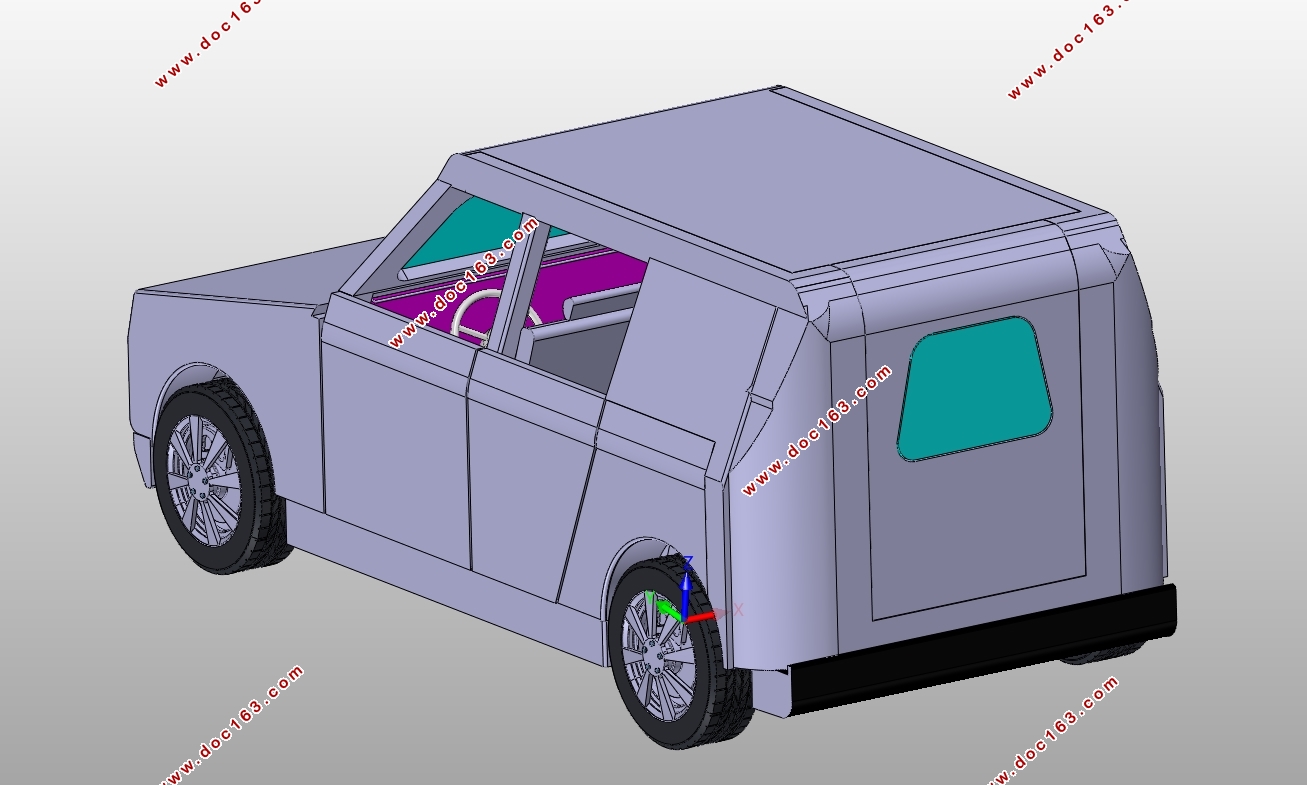
需要确定的主要参数为车辆的长、宽、高,车辆轴距,车辆最高车速,车辆整车整备质量,车辆总质量,车辆稳定车速以及续驶里程等。参考市场定位相似的车型smart forfour以及比亚迪f0设计小型电动汽车的尺寸参数,设计目标车辆长、宽、高分别为3500mm、1650mm以及1550mm,车辆轴距2500mm。其中,车辆总质量和整车整备质量相关。
[资料来源:THINK58.com]
 [资料来源:THINK58.com]
[资料来源:THINK58.com] 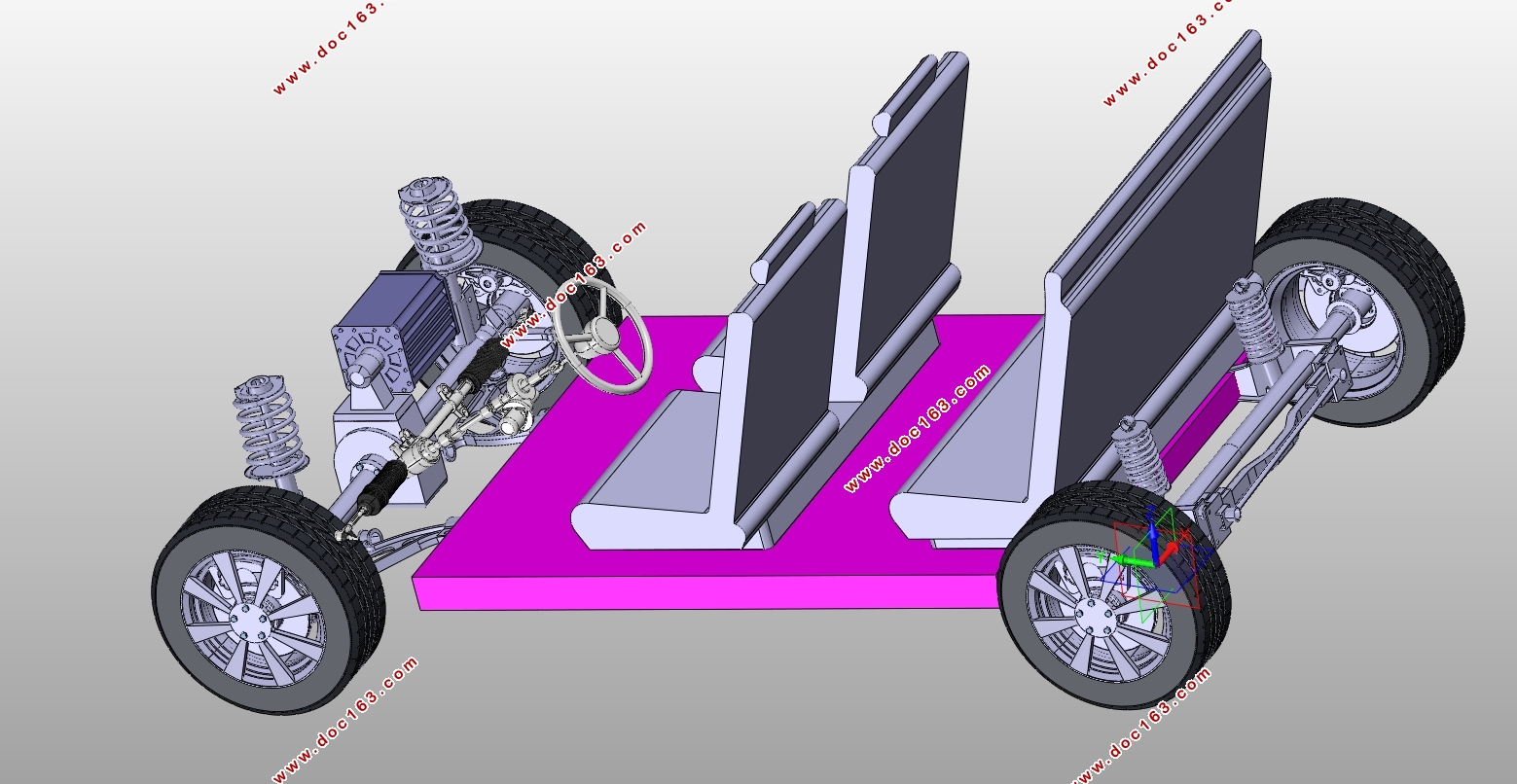

目 录
第一章 绪论 1
1.1 引言 1
1.2 国内外纯电动汽车研究现状 2
1.3 论文主要研究内容 3 [版权所有:http://think58.com]
第二章 小型纯电动汽车总体设计参数和布局方式的确定 6
2.1 小型纯电动汽车总体设计参数的确定 6
2.1.1 小型纯电动车技术参数的确定 6
2.1.2 小型电动车驱动系统计算参数的选定 6
2.2 小型纯电动汽车布局方式的确定 7
2.3 小型纯电动代步车车型选择和模型建立 8
2.4 本章小结 9
第三章 纯电动汽车的电动动力系统匹配 10
3.1 电动汽车电动动力系统评价指标 10
3.2 小型电动车动力系统匹配流程和动力学分析 10
3.2.1 小型电动车动力系统匹配流程 10
3.2.2 小型电动车运动方程分析 11
3.2.3 小型电动车运动学参数确定 13
3.3 本章小结 13
第四章 小型纯电动汽车驱动电机系统匹配 14
4.1 电动汽车常用电动机 14
4.2 驱动电机系统匹配 16
4.2.1 电动机额定功率匹配 16
4.2.2 电动机峰值功率匹配 17
4.2.3 电动机转矩匹配 17
4.3 电动车传动系匹配 18
4.3.1 最高车速和电动机最高转速确定传动比上限 18
4.3.2 最高车速下驱动力矩和最高转速输出力矩确定传动比下限 18
4.3.3 最大爬坡度下驱动力矩和最大输出转矩确定传动比下限 19
4.4 本章小结 19
第五章 小型纯电动汽车动力电池组匹配 20
5.1 电动汽车常用动力电池 20 [版权所有:http://think58.com]
5.2 动力电池系统匹配 21
5.2.1 电动车高压系统电压等级匹配 21
5.2.2 电动车电池组额定容量匹配 21
5.2.3 电动车需求最大功率匹配 22
5.2.4 电动汽车续驶里程匹配 22
5.3 本章小结 23
第六章 电动车设计验证与仿真分析 24
6.1 基于计算方法的电动汽车性能验证 24
6.1.1 电动汽车最高车速验证 24
6.1.2 电动车最大爬坡度的验证 24
6.1.3 电动汽车续驶里程验证 26
6.1.4 小型电动汽车整车设计参数 26
6.2 基于ADVISOR的电动车性能验证 27
6.2.1 ADVISOR电动车模型组成 27 [资料来源:http://THINK58.com]
6.2.2 基于ADVISOR的电动车动力性验证 29
6.2.3 基于ADVISOR的电动车经济性验证 30
6.3 本章小结 32
第七章 结论与展望 33
7.1 结论 33
7.2 展望 33
参考文献 34
致谢 36
Contents
I INTRODUCTION 1
1.1 Foreword 1
1.2 Electric Vehicle Research Status in Home and Abroad 2
1.3 The Main Research Content of the Paper 4
II DETERMINATIONS OF SMALL PURE ELECTRIC VEHICLE PARAMETERS AND LAYOUT 6
2.1 Determination of the Small Pure Electric Vehicle Parameters 6
2.1.1 Small Pure Electric Vehicle’s Technical Parameters 6
2.1.2 Determination of Calculating Parameters of Drive System 6
2.2 Determination of Small Pure Electric Vehicle Layout 8
2.3 Small Electric Scooter’s Type Selection and Model Establishment 9
2.4 Summary 10
III PURE ELECTRIC VEHICLE’S POWER SYSTEM MATCHING 12
3.1 Evaluation Index of Electric Vehicle’s Electric Power System 12
3.2 Matching Process and Dynamic Analysis of Small Electric Vehicle Power System 13
3.2.1 Small Electric Vehicle Power System Matching Process 13
3.2.2 Analysis of the Motion Equation of Small Electric Vehicles 14
3.2.3 Determination of Kinematic Parameters of Small Electric Vehicles 16 [资料来源:www.THINK58.com]
3.3 Summary 16
IV SMALL PURE ELECTRIC VEHICLE DRIVE MOTOR SYSTEM MATCHING 18
4.1 Electric Motors Commonly Used in Electric Vehicles 18
4.2 Drive Motor System Matching 20
4.2.1 Motor Rated Power Matching 21
4.2.2 Motor Peak Power Matching 21
4.2.3 Motor Torque Matching 21
4.3 Electric Vehicle Transmission Matching 23
4.3.1 Use Maximum Speed and Motor Maximum Speed to Determine the Upper Limit of the Transmission Ratio 23
4.3.2 To Determine the Lower Limit of the Transmission Ratio with Maximum Speed under the Drive Torque and the Output Torque 24
4.3.3 Use Maximum Driving Speed and Maximum Output Torque at the Maximum Climb Rate to Determine the Lower Limit of the Transmission Ratio 24 [来源:http://www.think58.com]
4.4 Summary 25
V SMALL PURE ELECTRIC VEHICLE POWER BATTERY PACK MATCHING 26
5.1 Power Battery Commonly Used on Electric Vehicle 26
5.2 Power Battery System Matching 27
5.2.1 Electric Vehicle High Voltage System Matching 27
5.2.2 Electric Vehicle Battery Pack Rated Capacity Matching 28
5.2.3 Electric Vehicle Demand Maximum Power Matching 28
5.2.4 Electric Vehicle Drive Range Matching 29
5.3 Summary 30
VI VERIFICATION AND SIMULATION ANALYSIS OF ELECTRIC VEHICLE DESIGN 31
6.1 Verification of Electric Vehicle Performance Based on Calculation Method 31
[版权所有:http://think58.com]
6.1.1 Maximum Speed Verification of Electric Vehicles 31
6.1.2 Verification of Maximum Climbing Degree of Electric Vehicle 32
6.1.3 Electric Vehicle Drive Range Verification 33
6.1.4 The Design Parameters of Designed Small Electric Vehicle 34
6.2 ADVISOR-Based Electric Vehicle Performance Verification 35
6.2.1 ADVISOR Electric Vehicle Model Composition 35
6.2.2 Electric Vehicle Dynamics Verification Based on ADVISOR 37
6.2.3 Economic Evaluation of Electric Vehicles Based on ADVISOR 38
6.3 Summary 40
VII CONCLUSION AND PROSPECT 41
7.1 Conclusion 41 [资料来源:http://THINK58.com]
7.2 Prospect 42
REFERENCES 43
ACKOWNLEDGEMENTS 45 [来源:http://think58.com]
下一篇:场地自动驾驶车辆制动系统设计(含CAD零件图装配图,STP三维图)