
自动驾驶微型纯电动车转向系设计(含CAD零件图装配图,CATIA三维图)
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
自动驾驶微型纯电动车转向系设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书14000字,CAD图6张,CATIA三维图)
摘 要
随着人工智能在各行各业的兴起,自动驾驶的时代已然来临。不久以前还仅存于概念车上的自动驾驶功能,现在正成为全球各大厂商的研究热门。因此,我们也应该紧跟时代脚步,积极进军自动驾驶领域。而对于自动驾驶汽车,转向系的执行机构是关键一环。
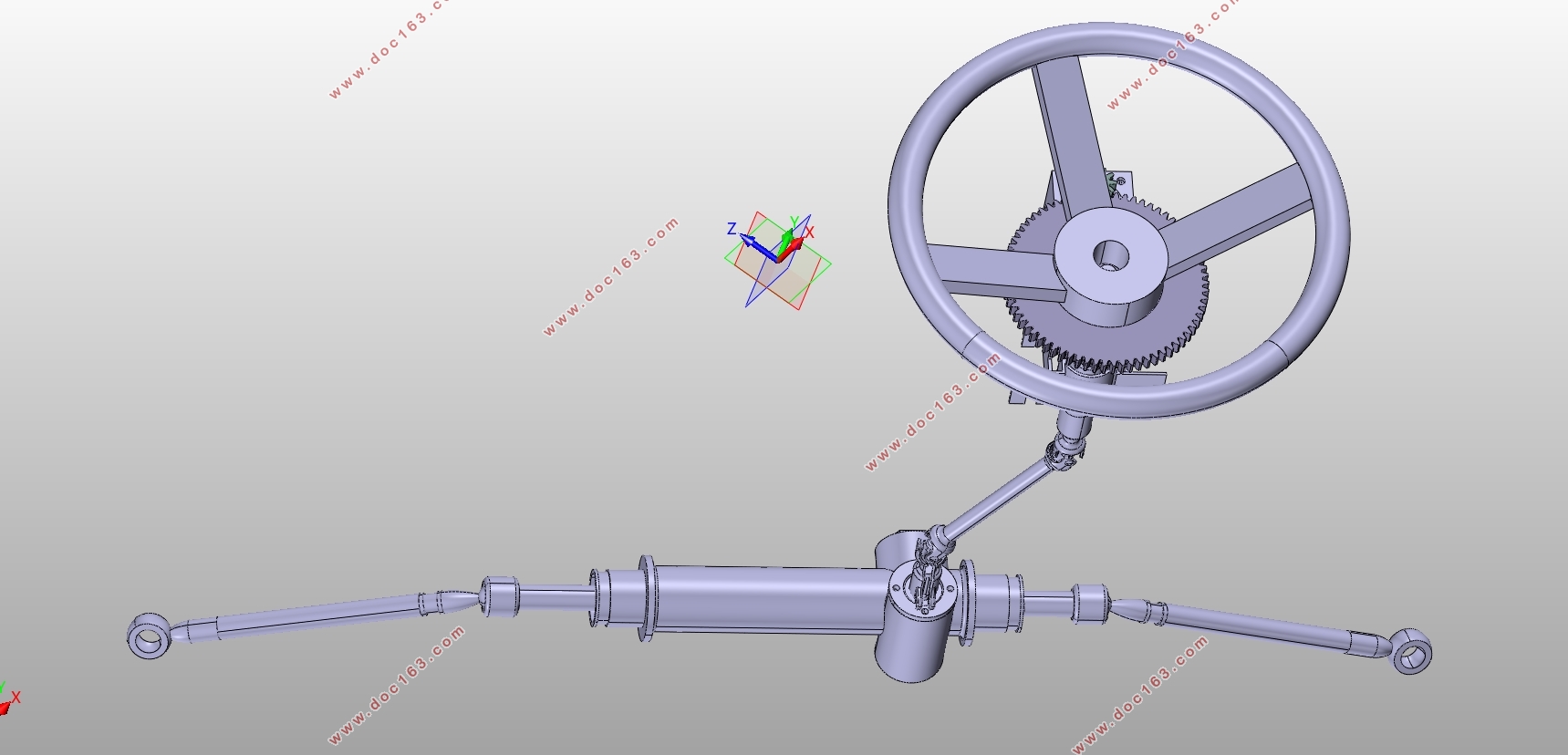
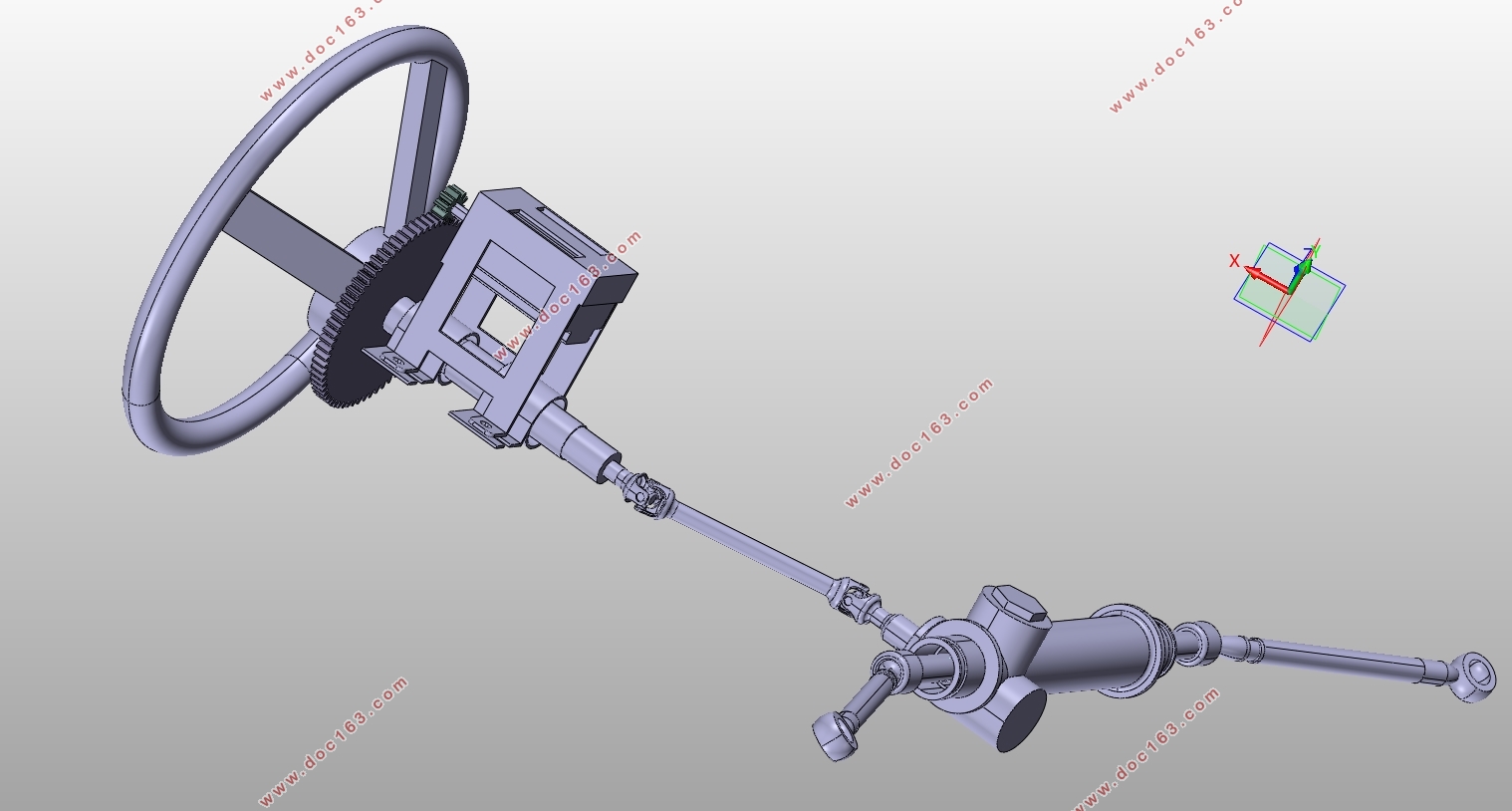
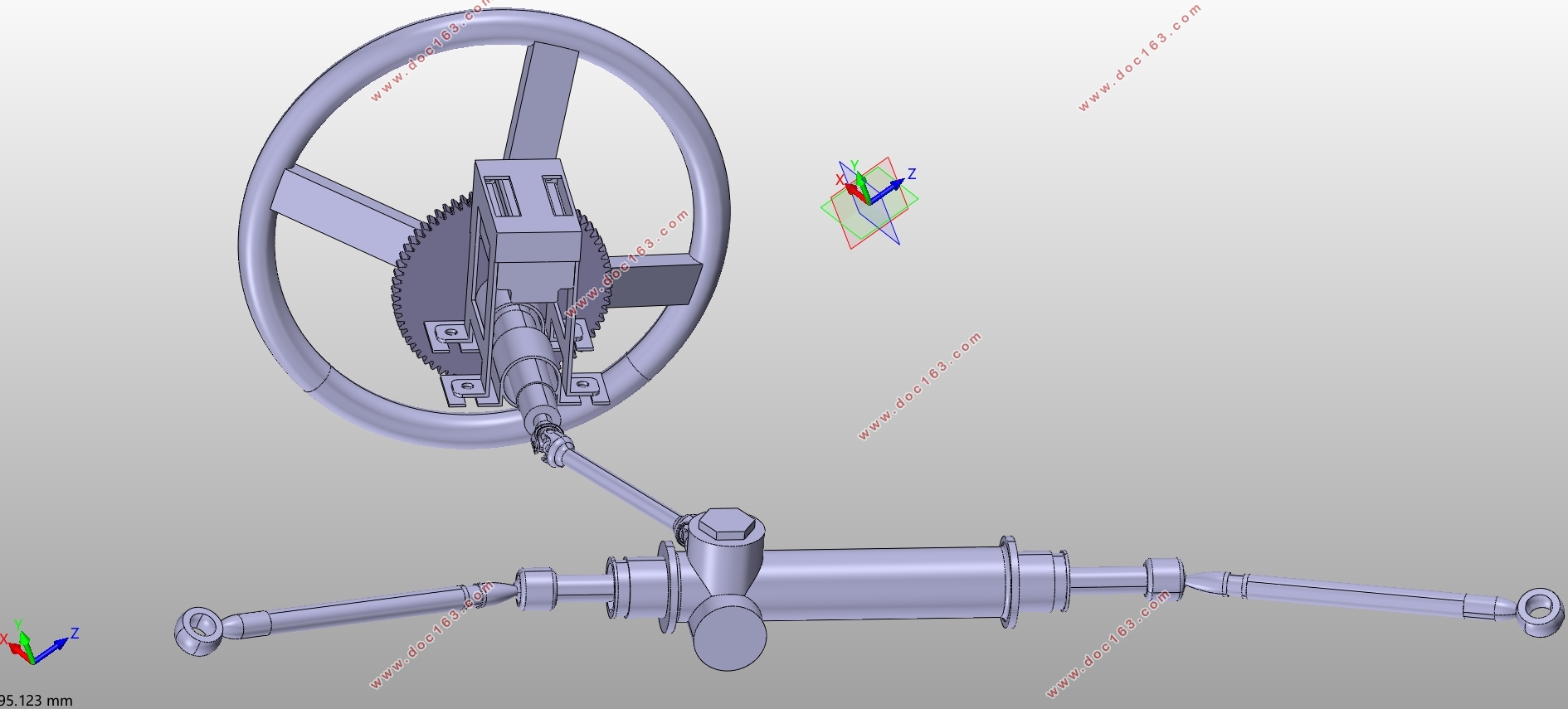
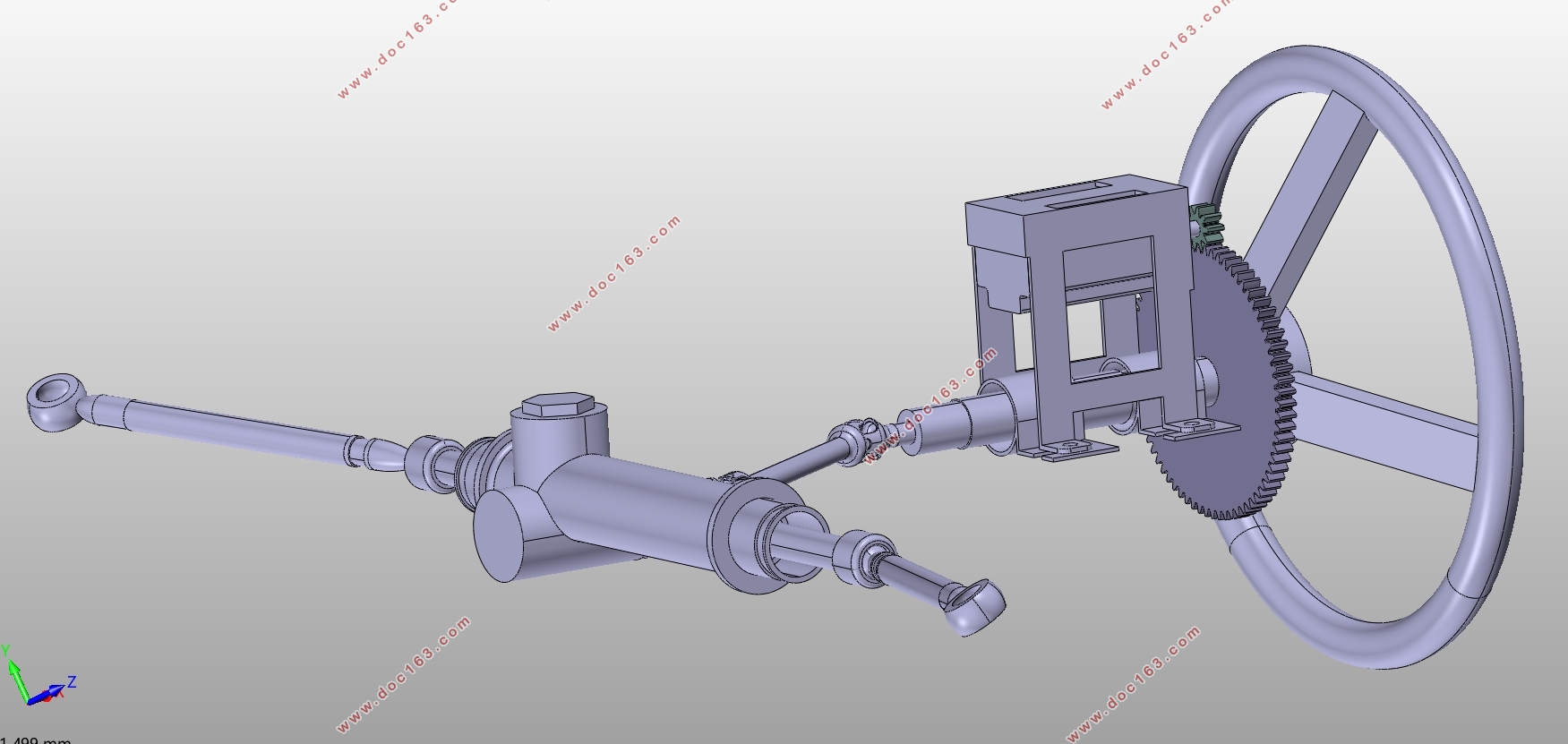
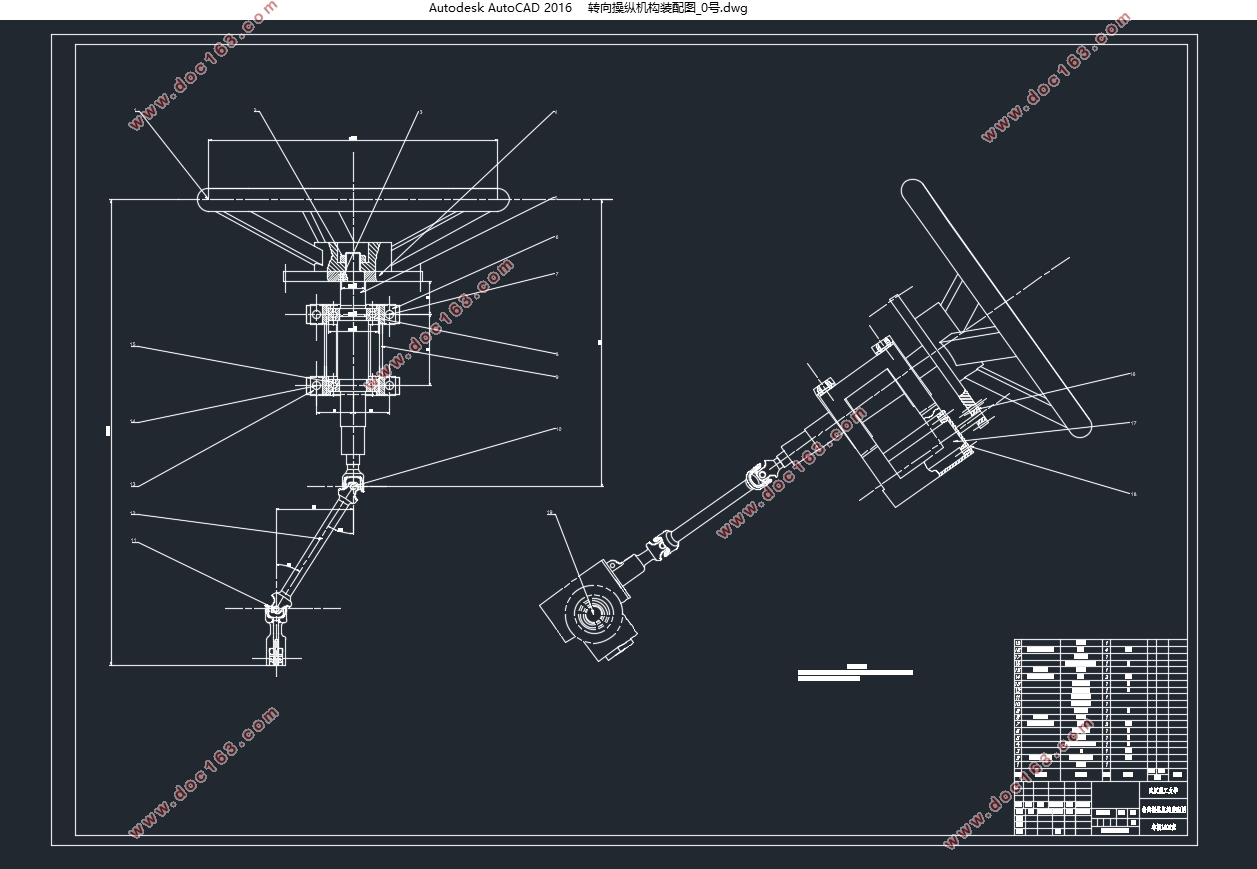
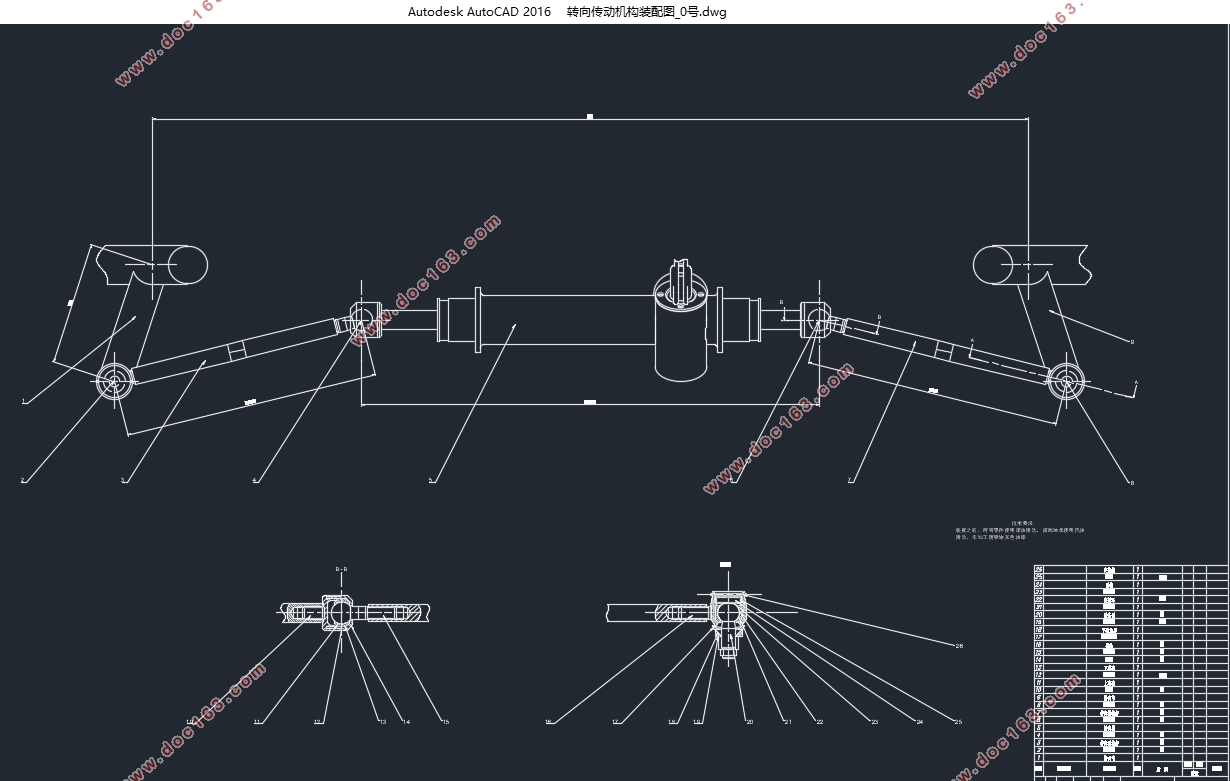
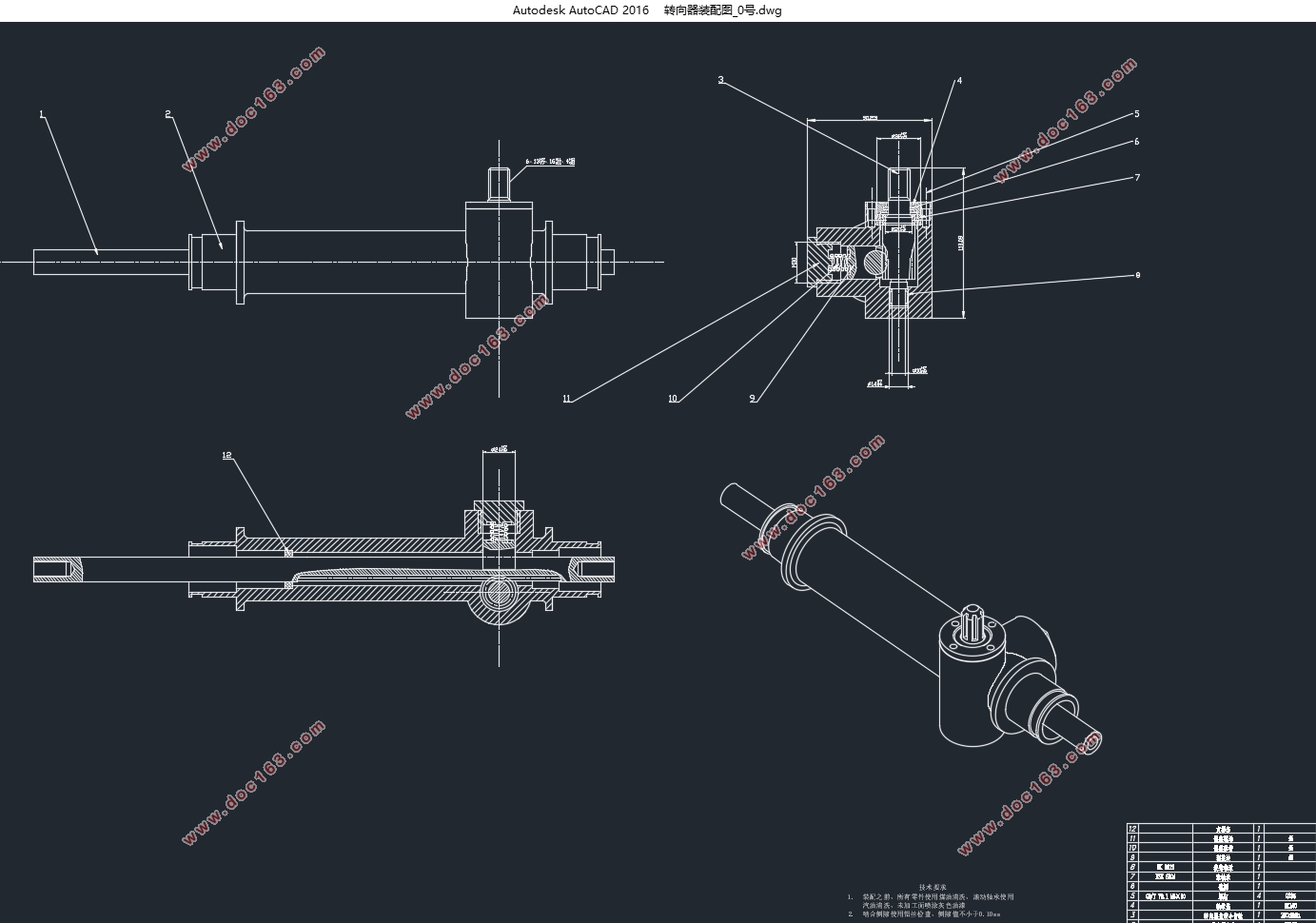
本文介绍了一个自动驾驶微型纯电动车的自动转向机构的设计过程,该转向机构以伺服电机为动力源,通过一对开放式齿轮传动,带动转向盘与转向柱转动。转向器采用了齿轮齿条转向器。本文首先对自动驾驶微型纯电动车转向系及其部件的结构型式进行了一定分析,确定了基本的结构设计方案,然后依次对转向器、转向传动机构、转向操纵机构及自动转向执行机构进行了设计,确定转向系及其部件的技术参数,并通过对转向系及其部件的设计计算分析,完成了主要部件的应力校核,以及转向梯形结构参数的优化设计。最后完成了主要零部件的CAD与CAE。
关键词:转向系、自动驾驶、齿轮齿条转向器
Abstract
As artificial intelligence is rising in many industries, the era of self-driving is coming. The autopilot function, which was only existent in the concept car few years ago, is now becoming a research hot spot for major global manufacturers. Therefore, we should also keep up with the pace of the times and actively enter the field of automatic driving. For self-driving cars, the steering mechanism is an important part.
[资料来源:THINK58.com]
A design process of steering mechanism of self-driving micro-electric vehicle is introduced in this paper. The steering mechanism uses a servo motor as power source, which drives the steering column through a pair of open gear. Firstly, the structure of the steering system and components of the self-driving micro-electric vehicle is analyzed, and then the basic scheme of structural design is determined. After that, the steering gears, steering transmission mechanism, steering mechanism and automatic steering actuator are carried out, and the technical parameters of the steering system and its components are determined through a series of calculation and analysis. Besides, stress check of the main components are completed and an optimization method is used to design the steering trapezoid. Finally, CAD and CAE of main parts are completed.
Keywords:Self-driving, Steering mechanism, Rack-and-pinion steering gears
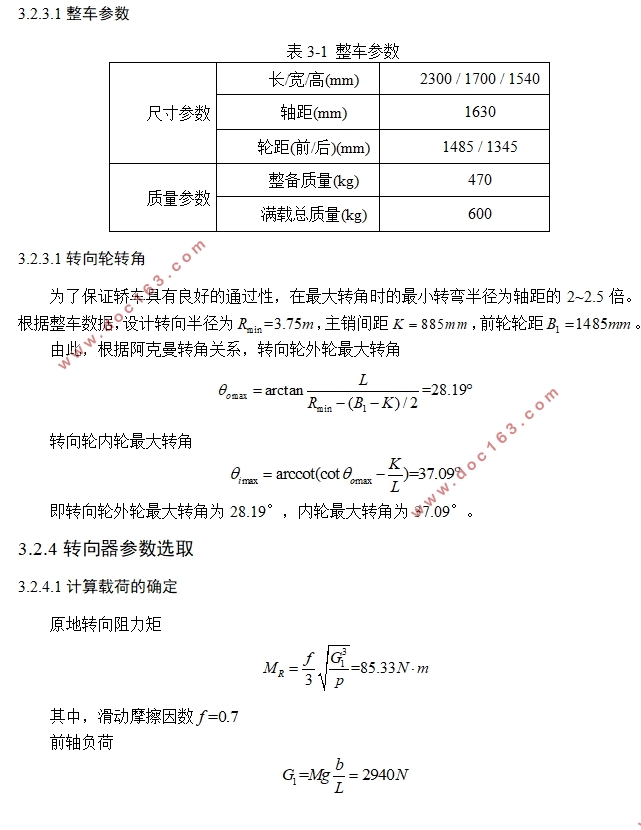
3.2.3.1整车参数
表3-1 整车参数
尺寸参数 长/宽/高(mm) 2300 / 1700 / 1540 [来源:http://www.think58.com]
轴距(mm) 1630
轮距(前/后)(mm) 1485 / 1345
质量参数 整备质量(kg) 470
满载总质量(kg) 600
 [来源:http://www.think58.com]
[来源:http://www.think58.com] 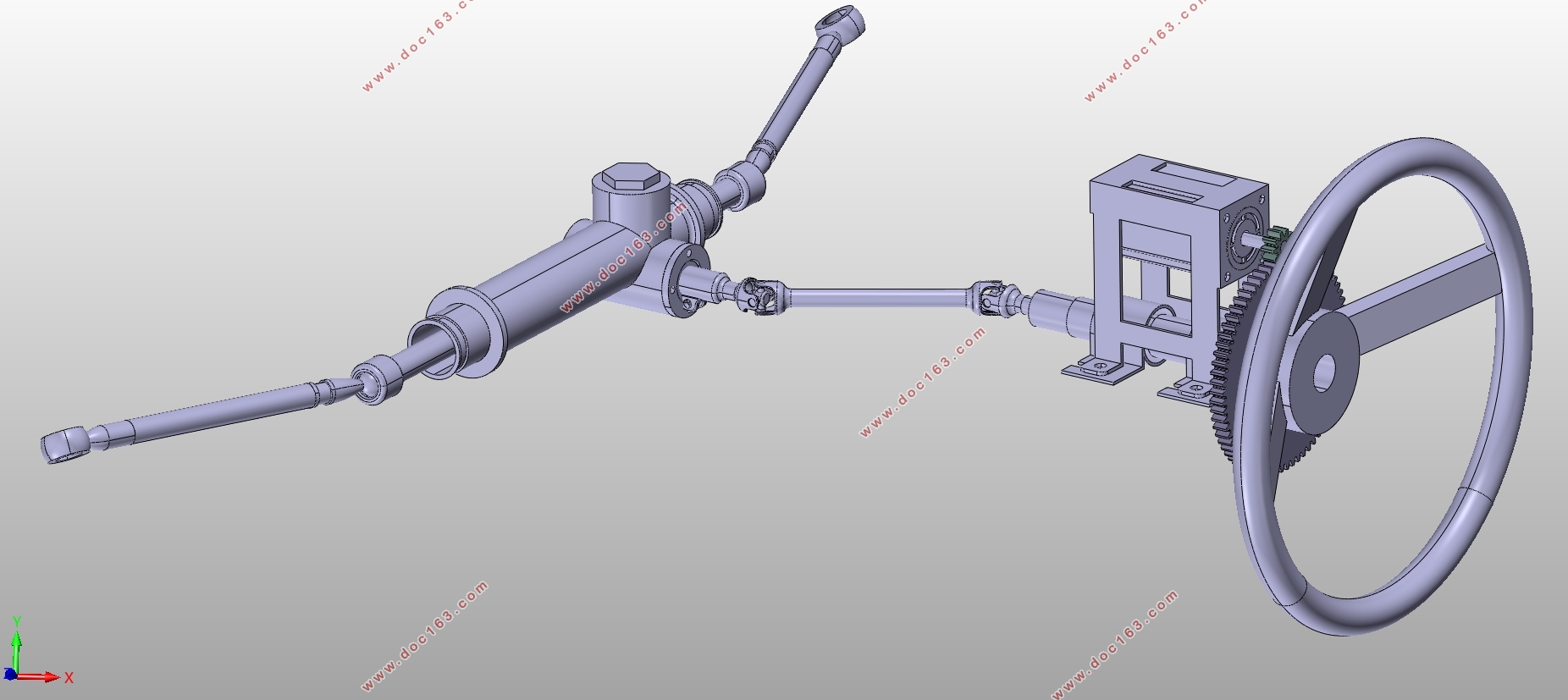
目 录
第1章 绪论 1
第2章 转向系统技术方案 3
第3章 转向器的设计 5
3.1分类及设计选择 5
3.2齿轮齿条转向器基本设计 7
3.2.1结构选择 7
3.2.2布置形式 8
3.2.3设计参数 9
3.2.4转向器参数选取 10
3.3 转向器校核 12
3.3.1齿轮应力校核 12 [来源:http://think58.com]
3.3.2齿条应力校核 13
第4章 转向传动机构 15
4.1概述 15
4.2转向梯形的设计 15
4.2.1参考数据 15
4.2.2横拉杆铰接点位置的确定 15
4.2.3转向梯形优化设计 17
4.3球销应力计算 23
第5章 操纵机构 25
5.1操纵机构的防伤安全措施 25
5.2自动转向机构 25
5.2.1自动转向机构的总体方案 25
5.2.2电机的选型 26
5.2.3齿轮参数的确定 26
第6章 主要部件的有限元分析 28
6.1 CATIA与ANSYS软件简介 28
6.2有限元分析结果 28
第7章 结论 30
参考文献 31
附录 32
致谢 38
[资料来源:www.THINK58.com]
下一篇:电动工程车总布置虚拟设计(含CAD零件图装配图,CATIA三维图)