
锻压机上下料机械手的机械及PLC控制设计(含程序,CAD梯形图装配图

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
锻压机上下料机械手的机械及PLC控制设计(含程序,CAD梯形图装配图)(论文说明书13600字,CAD图7张)
The mechanical and control design of PLC manipulator under the forging press
摘要
本文简要介绍了工业机器人的概念,组成和分类以及自由度和坐标形式,并阐述了液压技术的特点以及其在国内外发展的特点和PLC控制。
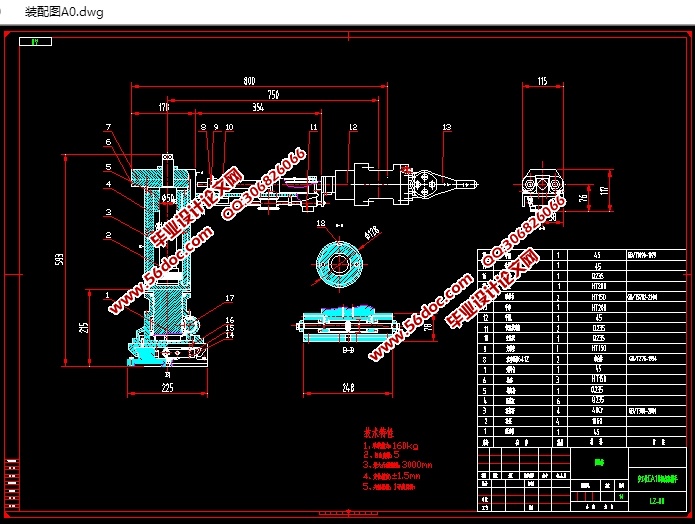
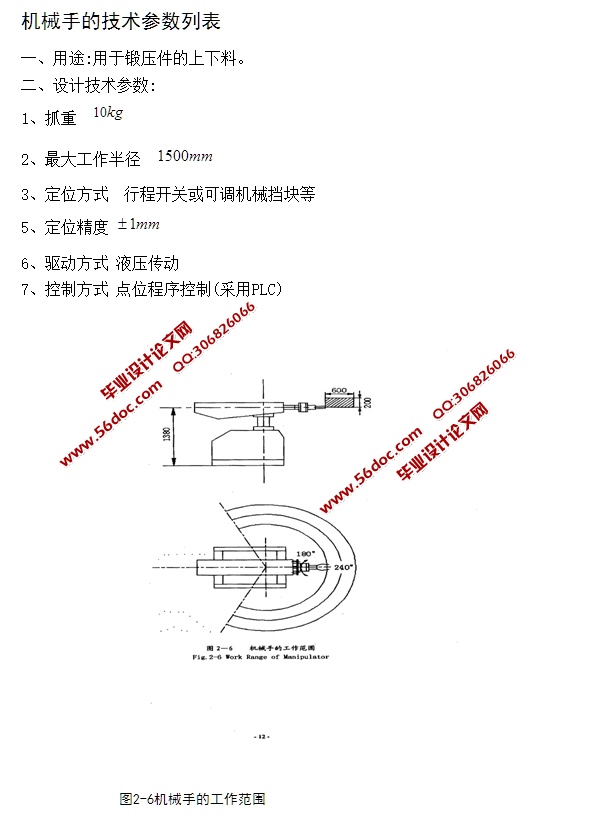
本文通过对锻压机取件机械手进行总体设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,对机械手的夹持式手部、手腕结构进行了结构设计,计算出了使它们动作需要的扭矩,同时设计了机械手的液压系统,机械手工作图液压系统原理图,液压系统的工作原理图的参数化绘制进行了研究,并对液压机械手所使用的轴承,传动轴等进行了计算,选择标准件。大大提高了绘图效率和图纸质量,这些早期的工作为后续的液压机械手的设计做足了充分的准备。
本文所设计的液压机械手在很大方面提高了生产效率,节约了生产成本,对后续的机械手的研究和发展也有着重要的意义。
关键词 工业机器人;锻压机上下料机械手;PLC
1.4 课题的提出及主要任务 [资料来源:http://THINK58.com]
该项目将完成的主要工作如下:
(1)为液压机械手,因此相对于专用机械手,适用面较宽。
(2)坐标式机械手的自由度和选择。
(3)设计机械手的执行机构,包括:设计的手,手腕,手臂和其他部分。为了使一个更通用的,一方面旨在取代结构,不仅可以应用于夹手指的抓取和锻件,也可以吸收金属薄板工件的液流负压抽油时所需要的行业。
(4)液压传动系统的设计
本课题将机械手液压传动系统的设计,包括液压元件的选择,液压回路的设计,并绘制液压系统原理图。
(5)研究了液压传动系统原理图的参数化绘图,提高绘图效率,提高绘图质量。
(6)对机械手控制系统设计。
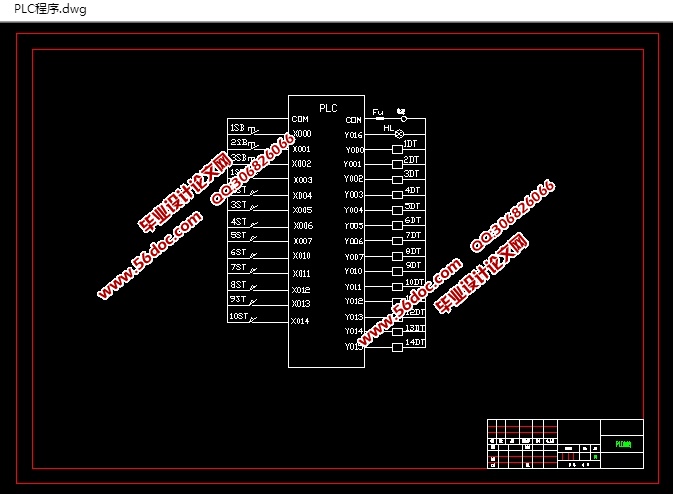
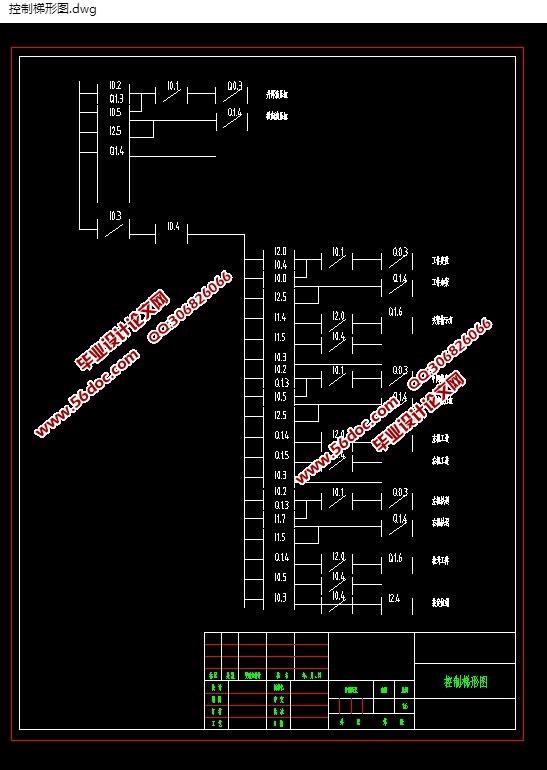
机械手采用可编程控制器(PLC)控制机械手,该项目将选择PLC型号,根据工作流程组织的机械手的PLC程序,并画出梯形图。
[资料来源:http://THINK58.com]
[资料来源:http://THINK58.com]
目 录
1绪论.....................................................................................................................1
1.1机械手概述...................................................................................................1
1.2机械手的组成和分类...................................................................................2
1.2.1机械手的组成.........................................................................................3
1.2.2机械手的分类…………………………………………….....................4
1.3国内外发展状况.. .....................................................................................................7 [资料来源:http://THINK58.com]
1.4课题的提出及主要任务……………………………………………….......8
2 机械手的设计方案……………………………………………........................9
2.1机械手的座标型式与自由度………………………………………..........10
2.2机械手的手部结构方案设计………………………………………..........11
2.3机械手的手腕结构方案设计………………………………………..........13
2.4机械手的手臂结构方案设计………………………………………..........14
[资料来源:THINK58.com]
2.5机械手的主要参数…………………………………………………..........18
2.6机械手的技术参数列表……………………………………………..........19
3 手部结构设计……………………………………………...............................20
3.1夹持式手部结构……………………………………………………..........21
3.1.1手指的形状和分类…………………………………………................22
3.1.2设计时考虑的几个问题……………………………………................22
[资料来源:http://THINK58.com]
3.1.3手部夹紧油缸的设计………………………………………................22
4 手腕结构设计………………………………………………….......................22
4.1手腕的自由度………………………………………………………..........22
4.2手腕的驱动力矩的计算……………………………………………..........23
4.2.1手腕转动时所需的驱动力矩…………………………………............23
4.2.2回转油缸的驱动力矩计算……………………………………............23
4.2.3回转油缸的驱动力矩计算校核………………………........................23
5 手臂伸缩,升降,回转油缸的设计与校核………………………...............23
5.1手臂伸缩部分尺寸设计与校核……………………………………..........24
5.1.1尺寸设计……………………………………………............................25
5.1.2尺寸校核…………………………………………….........................25
5.1.3导向装置…………………………………………….........................26 [资料来源:http://www.THINK58.com]
5.1.4平衡装置…………………………………………….........................27
5.2手臂升降部分尺寸设计与校核……………………………….................27
5.2.1尺寸设计…………………………………………….........................27
5.2.2尺寸校核…………………………………………….........................27
5.3手臂回转部分尺寸设计与校核…………………………………….........28
5.3.1尺寸设计…………………………………………….........................29 [资料来源:http://www.THINK58.com]
5.3.2尺寸校核…………………………………………….........................30
6 液压系统设计……………………………………………................................31
6.1液压缸的选型计算………………………………………….....................32
6.2液压系统原理图的确定………………………….....................................33
7 机械手的PLC控制设计……………………………………………................34
7.1可编程序控制器的选择及工作过程……………………………….........35
7.1.1可编程序控制器的选择……………………………………….........36
7.1.2可编程序控制器的工作过程…………………………………..........37
7.2机械手可编程序控制器控制方案…………………………………..........39
结论………………………………………………………………….....................40
致谢…………………………………………………………………………….....41
参考文献………………………………………………………………………….42