
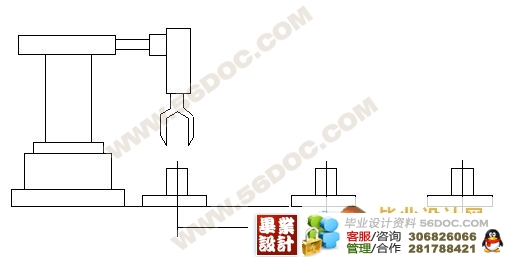
搬动机械手PLC控制系统设计

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
摘要:本次设计分为机械夹持器的设计,步进电机的选择与计算和程序的编写。
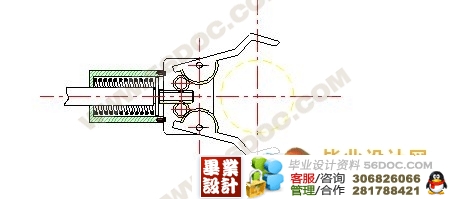
机械夹持器的设计首先要确定被夹持物体的质量和大小。从被夹持物体的质量计算出V形手掌的摩擦力,从摩擦力计算出需要弹簧的弹力,然后根据公式和图表选择弹簧的种类和规格。
从物体的大小可以设计出机械夹持器V形手掌的大小,和大小齿轮的种类和规格。
步进电机在选择和计算之前必须确定步进电机在传动过程中的扭矩,然后根据扭矩选择与之相匹配的步进电机。
程序的编写。编写程序之前应先了解步进电机。然后计算出步进电机转一周需要的脉冲个数,根据丝杠的导程和机械手行动的距离计算出PLC提供的脉冲个数。控制分自动和手动两种工作方式,在各自执行的过程中不能相互干扰。(毕业设计网 )
关键词:机械夹持器,步进电机,PLC
Moveable Maniplator PLC Control System Design
Abstract:This design into the design of mechanical clamping, stepper motor selection and calculation procedures for the preparation and PLC.
The design of mechanical clamping first was gripping objects to determine the quality and size. Gripping objects from the calculation of the quality of the V-shaped palm friction from the friction of the elasticity needed the spring, then spring formulas and charts choice of the type and specifications. [资料来源:www.THINK58.com]
From the size of objects can be designed for mechanical clamping of the V-shaped palm-size, the type and size of gear and specifications.
Stepper motor in the choice and calculation must be determined before the stepper motor drive torque in the process, and then select them in accordance with torque to match the stepper motor.
Procedures for the preparation. Preparation procedures prior understanding stepper motor. Calculation of the stepper motor week to the needs of the number of pulses, according to the lead screw-lead and manipulator action PLC calculate the distance between the pulse number. Automatic and manual control of the two methods of work, in the process of their implementation can not interfere with each other.
Key words: mechanical clamping, stepper motor, PLC [来源:http://think58.com]
目录
毕业设计任务书…………………………………………………………………… Ⅰ
毕业设计调研报告………………………………………………………………… Ⅱ
摘要………………………………………………………………………………… Ⅲ
Abstract………………………………………………………………………………Ⅳ
绪论……………………………………………………………………………………1
第一章 PLC简介
1. PLC含义 ………………………………………………………………………3
2. 可靠性高,抗干扰能力强 ………………………………………………………3
3. PLC的应用领域 ………………………………………………………………4
4. PLC的国内外状况………………………………………………………………5
5. PLC未来展望 ………………………………………………………………… 6
第二章 PLC的构成
1. PLC基础知识 …………………………………………………………………7 [版权所有:http://think58.com]
2. PLC控制系统的设计基本原则 ………………………………………………9
(毕业设计网 )
3. PLC软件系统及常用编程语言 ………………………………………………9
4. STEP7程序的使用 …………………………………………………………10
5. WINCC程序的使用 ………………………………………………………… 11
6. 主要特点 ………………………………………………………………………12
第三章 PLC控制机械手简介
1. 控制要求 ………………………………………………………………………14
2. 机械手移动的工作原理 ………………………………………………………14
3. PLC的控制说明 ………………………………………………………………14
第四章 机械夹持器的设计
1. 齿轮设计 ………………………………………………………………………16
2. 齿轮副设计 ……………………………………………………………………18
3. 齿条设计 ………………………………………………………………………18
4. 弹簧选择 ………………………………………………………………………18
第五章 步进电机选择与计算 [资料来源:http://think58.com]
1. 确定参数 ………………………………………………………………………19
2. 确定步进电机型号 ……………………………………………………………19
3. PLC提供脉冲个数的计算 ……………………………………………………22
4. 步进电机移动时间的计算 ……………………………………………………22
第六章 PLC程序的编写
1. 梯形图 …………………………………………………………………………24
毕业设计小结 ………………………………………………………………………32
参考文献 ……………………………………………………………………………33
致谢 …………………………………………………………………………………34
附表:中英文翻译………………………………………………………………… 35 [来源:http://www.think58.com]
[来源:http://think58.com]
下一篇:PLC控制自动售货机的设计