
基于模糊控制的智能小车循迹控制
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
基于模糊控制的智能小车循迹控制(论文13000字)
摘要:本文针对以k60为开发平台的智能小车为背景,设计了一种模糊控制器,使小车相对于传统PID控制能够更好的贴合赛道中线行驶,不易发生冲出赛道的情况。本文先行介绍了智能小车的软硬件,构建出智能车平台,然后介绍了本文所设计的模糊控制器,最后本文通过MATLAB模拟仿真和实地智能小车检测得出所设计控制器的正确性以及效性。
关键词:模糊控制 转向控制 路径跟踪 智能小车
Intelligent Vehicle Tracking Control Based on Fuzzy Control
Abstract:This paper designs a fuzzy controller based on the smart car with the development platform of k60, which can make the car fit better to the center line of the track than the traditional PID control, and it is not easy to get out of the track. This paper introduces the software and hardware of the smart car, constructs a smart car platform, and then introduces the fuzzy controller designed in this paper. Finally, the correctness and effectiveness of the designed controller are obtained through MATLAB simulation and field smart car detection.
[资料来源:http://www.THINK58.com]
Keywords:Fuzzy Control Steering Control Path Tracking Smart Car
[资料来源:http://www.THINK58.com]
目 录
1.绪论....................................................1
1.1研究背景及意义........................................................1
1.2国内外研究现状........................................................1
1.3主要研究内容..........................................................2
2. 相关理论基础...........................................2
2.1模糊控制简介..........................................................2
2.2基本模糊控制器的设计方法..............................................3
[版权所有:http://think58.com]
3.智能小车软硬件..........................................4
3.1硬件部分..............................................................4
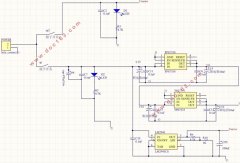
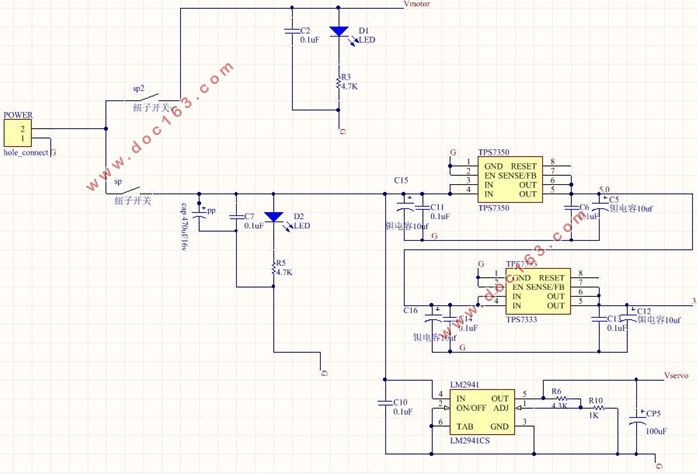
3.1.1小车系统原理图..................................................4
3.1.2 k60开发平台....................................................6
3.1.3电机和舵机模块..................................................7
3.1.4测速模块........................................................8
3.1.5图像处理模块....................................................8
3.2软件部分..............................................................9
3.2.1keil uvision4......................................................9
3.2.2控制主程序.....................................................10
4.模糊控制器设计.........................................13
4.1舵机(转向)模糊控制.................................................13
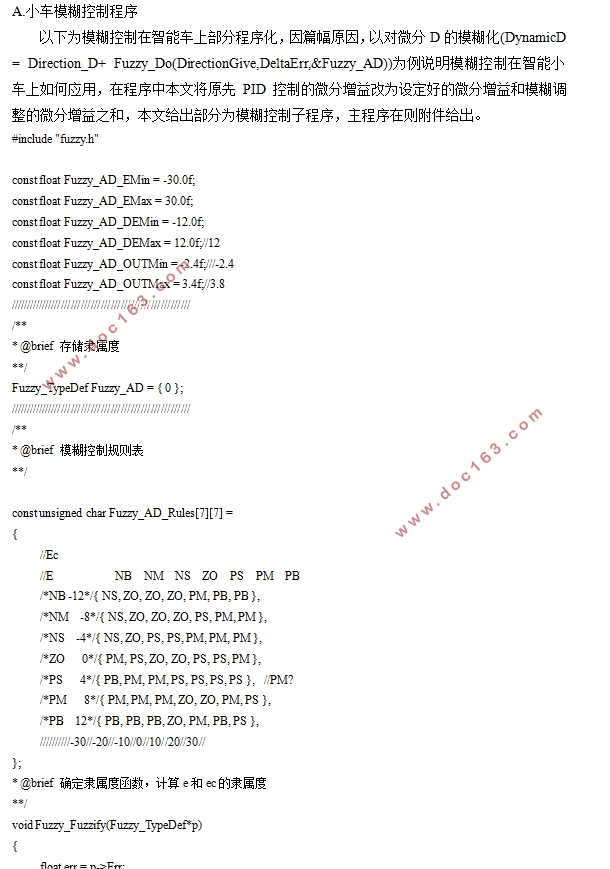
4.1.1模糊变量的选取.................................................13 [资料来源:www.THINK58.com]
4.1.2转向控制模糊化.................................................14
4.2速度模糊控制.........................................................17
4.2.1 PID控制.......................................................18
4.2.2增量式PID控制.................................................18
4.2.3模糊自整定模糊控制.............................................19
5. 实验仿真...............................................22
5.1舵机(转向)模糊控制仿真.............................................22
5.2速度模糊控制器仿真...................................................25
5.3实车检测.............................................................27
6. 结论与展望 ............................................30
参考文献.................................................31
致谢.....................................................32