
智能玩具小车的设计(含电路图,程序)

1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用.
密 惠 保
智能玩具小车的设计(含电路图,程序)(毕业论文10000字,CAD图7张)
摘 要:智能机器人在当今社会的应用越来越广泛。从普通的玩具机器人到工业控制机器人,从能够炒菜的机器人到可以进行太空探测的机器人,可以预见今后智能机器人的应用将更加广泛。普通的无线遥控车大家都很熟悉,任天堂的电玩Wii大家也都觉得很神奇。熟悉的不好玩,神奇的又玩不起,可能是很多人遇到的共同问题。本设计从全新的思维角度出发,制作一个日常生活可以玩的智能小车,以飨有共同爱好的读者。
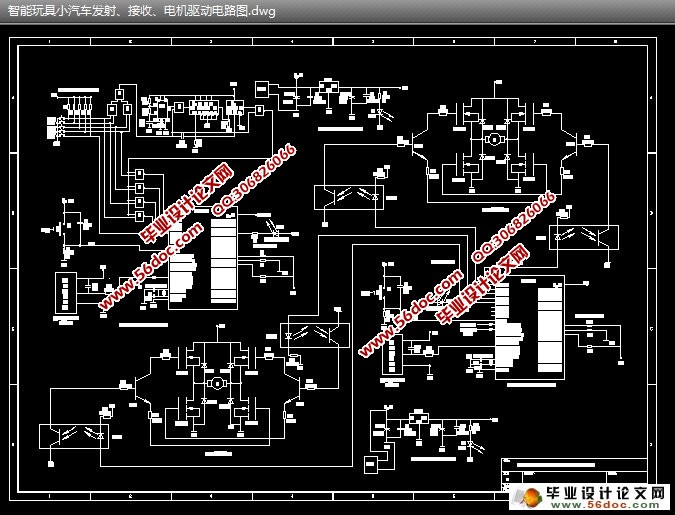
本论文设计采用AT89C2051作遥控发射器及接收处理器,汽车前进、后退与转向分别用两个电机,采用桥式开关电路驱动电机。无线传送用接收/发射模块完成。小汽车能前进、后退、左转、右转及自动驾驶(碰到障碍能自动改变行驶方向)。
关键词:智能玩具小汽车,AT8952,航模舵机。
The Design of Intelligent Toy Car
Abstract: In modern times, intelligent robots are widely used by more and more people. From ordinary toy robots to industrial robots, and robots which could cook itself to robots that could explore the space, we can predict that intelligent robots will be applied to other fields. Ordinary wireless remote controlled car is familiar for many people; however, they are curious about the Video Wii which is made by Ren Tiantang. It is a common problem that the ordinary ones are not interesting while the magical ones are too expensive to play. This design tries to make a intelligent car that can be played in our daily life to amusement the readers who have common hobbies. [版权所有:http://think58.com]
This paper design applies remote transmitter which is made by AT89C2051 and receiving processor, and the advance, back and turn movements of the car are controlled by two electrical machineries which apply bridge-switch circuit. Wireless transmission is accomplished by receiving/launch model. Therefore, the car can advance, hold back, turn left and right, and change the direction when it comes across barriers.
Key words: intelligent robots,AT8952,Rc steering gear
总体方案的拟定
经过对系统的分析,智能玩具小车大体上有两个功能:一个是手动操作,人为地控制向左、向右、向前、向后实现智能玩具小车的具体行驶路线,满足小孩子自己动手操作控制的要求;另一个功能是智能玩具小车的自动驾驶功能,当启动自动驾驶功能时,智能玩具小车能自动前进,在前进的过程中如果碰到障碍物,小车会停止前进,并自动启动后退并转弯的程序,实现避开障碍物的功能。当自能玩具小车是后退时遇到障碍物,智能玩具小车同样的会自动启动后退并转弯的功能,实现避障的功能。
在这个系统中,我们主要采用红外线控制小车的行驶方向,通过接收器接收到的数据,经过单片机处理分析,就能达到控制小车的行驶
[资料来源:http://think58.com]

目 录
摘要………………………………………………………………………………………1 [资料来源:http://think58.com]
关键词………………………………………………………………………………………1
1前言………………………………………………………………………………………2
2总体方案确定……………………………………………………………………………2
3硬件电路的设计…………………………………………………………………………3 [来源:http://think58.com]
3.1控制要求、电路设计………………………………………………………………3
3.1.1控制要求的设计…………………………………………………………3
3.1.2单片机模块方案的选择…………………………………………………4
3.13电机模块的选择…………………………………………………………5
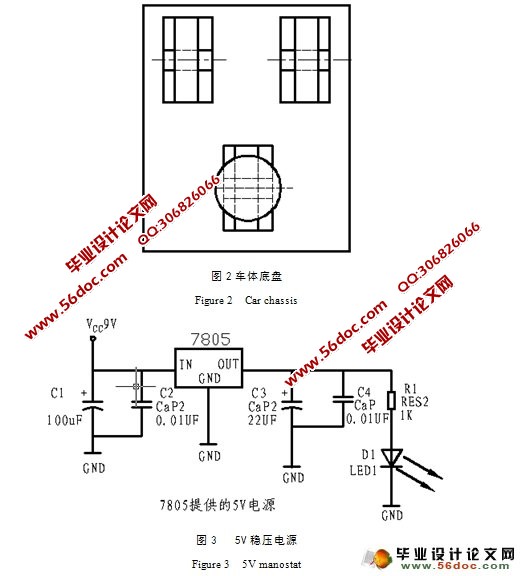
3.14稳压模块设计方案选择……………………………………………………5
3.2各单元电路设计…………………………………………………………6
3.2.1微控制器发射模块的设计………………………………………………6
3.2.2接收电路设计……………………………………………………………7
3.2.3电机驱动电路的选择……………………………………………………7
4主要硬件设备的介绍…………………………………………………………………8 [资料来源:http://www.THINK58.com]
4.1 AT89……………………………………………………………………………8
4.1.1主要性能…………………………………………………………………8
4.12功能特性描述……………………………………………………………9
4.13引脚结构…………………………………………………………………9
4.14引脚功能描述……………………………………………………………9 [来源:http://think58.com]
5系统主要程序的设计……………………………………………………………………12
5.1发射控制程序的设计…………………………………………………………12
5.2接收处理程序的设计…………………………………………………………12
6总结………………………………………………………………………………………15
参考文献……………………………………………………………………………………16 [资料来源:http://THINK58.com]
致谢………………………………………………………………………………………18
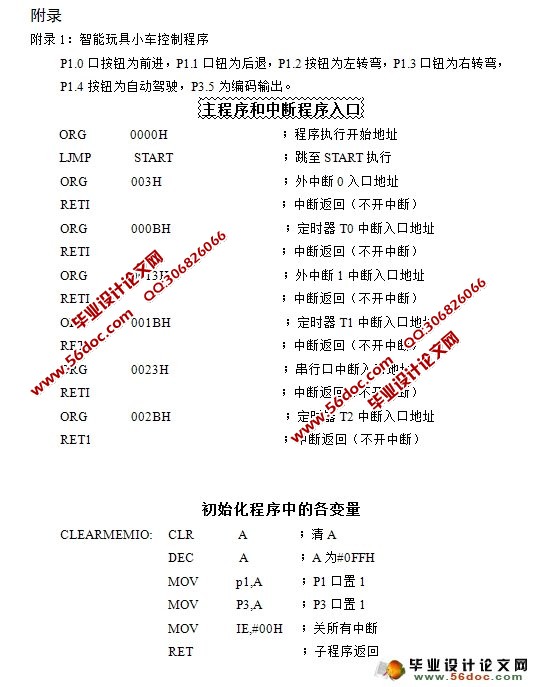
附录1( 智能玩具小车控制程序)…………………………………………………………19
[资料来源:http://think58.com]